采用聲發射技術預測機器人機械故障的可行性研究
2017-09-18 02:38:36朱振軍尹瑞榮姜錫魯葉建偉
中國設備工程 2017年17期
朱振軍,尹瑞榮,姜錫魯,葉建偉
(上汽通用汽車有限公司 整車制造工程,上海 201206)
采用聲發射技術預測機器人機械故障的可行性研究
朱振軍,尹瑞榮,姜錫魯,葉建偉
(上汽通用汽車有限公司 整車制造工程,上海 201206)
本文進行了聲發射技術對機器人機械故障預測的可行性研究,選取事件計數和幅度作為預測故障的主要參數,并通過對機器人的拆解驗證,確定聲發射技術可以預測機器人機械故障。
聲發射;機器人;故障預測
工業機器人是制造業實現數字化、智能化和信息化的重要載體,在汽車行業有廣泛應用。上汽通用汽車有限公司工業機器人應用比例很高。同時,工業機器人是典型的復雜性產品,集成了諸多先進技術和核心零部件,其自身的維護也是一項復雜的工作。對于流水線式生產企業,機器人突發故障停機,會造成長時間生產中斷,企業損失巨大。目前機器人的故障預測局限于電壓、電流、PLC等電信號,對于機械故障是間接測量,缺乏及時性和準確性。根據上汽通用汽車的排故經驗,機械故障相較于電氣故障往往造成更多的維修時間和停機損失。因此公司急需一種直接檢測機器人機械故障的手段。《ISO22096-2006 聲發射用于機械狀態監測的總體指導建議》中指出聲發射技術對于研究機械部件的潤滑、磨損和軸承故障是可行的。因此上汽通用汽車開展了應用聲發射技術預測機器人機械故障的可行性研究。
1 聲發射技術基本原理
聲發射(Acoustic Emission,AE)是指材料局部能量的快速釋放而發出瞬態彈性波的現象。利用儀器檢測、分析聲發射信號并利用聲發射信息推斷聲發射源的技術稱為聲發射技術。聲發射有很寬的檢測頻帶,可以避開一般的振動頻帶獲得更高的信噪比,對檢測方向和形狀不敏感。聲發射檢測適用于早期損傷、潤滑失效、低速旋轉機械、自身振動大等工況。
2 聲發射信號分析
聲發射信號有多項參數,本次研究發現事件計數和幅度可作為評判機器人機械狀態的主要參數。
事件計數:聲發射信號的波形,經過包絡檢波后,波形超過預置的閾值電壓形成一個矩形脈沖。如果一個突發型信號形成一個矩形脈沖叫做一個事件,這些事件脈沖數就是事件計數,見圖1。事件計數可以評估聲發射的強度,并區分不同的信號來源。
幅度:聲發射信號波形中的最大振幅值,反映了事件的大小,與閾值電壓大小無關,其大小決定事件的可檢測性,可作為聲發射源的強度大小的評價,與缺陷的大小有關。
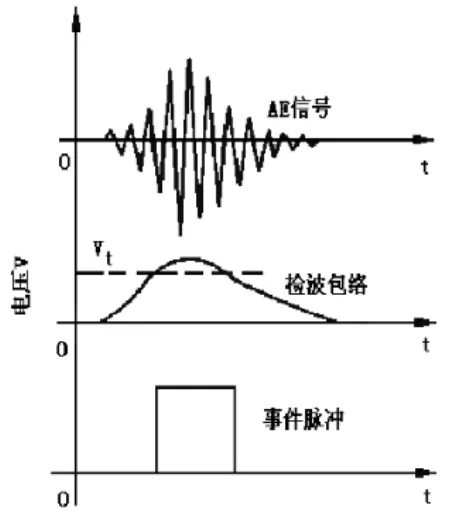
圖1 事件計數
3 故障預測研究
3.1 研究對象
為了研究事件計數和幅度對機器人機械故障的預測準確性,研究選取了三臺不同運行時間,且在日常運行維護中發現有狀態差異的機器人作為研究對象,見表1。由于高負荷工況和工作頻次,J2、J3軸的減速器故障頻次相對較高,因此作為此次研究的主要部件。

表1 機器人運行信息
3.2 檢測分析
測試過程中,J2 軸測試時,J2和J3運動,其它關節靜止;J3軸測試時,只有J3旋轉,其它關節均靜止。每個位置上的測試動作包括機械臂往返完整循環。聲發射傳感器安裝在距離減速機最近的端面上,三臺機器人的傳感器安裝位置基本一致。J2軸信號分析:本次測試中,機器人1(圖2)中沒有密集信號,只包含加減速中的零星信號。機器人2(圖3)和機器人3(圖4)的J2 軸信號總體上有相似性,每個動作周期內均有兩個信號簇,每個簇內均包含密集的頻率一致的沖擊信號。

圖2 機器人1的J2軸測試信號

圖3 機器人2的J2軸測試信號

圖4 機器人3的J2軸測試信號
J3軸信號分析:機器人1(圖5)中只包含零星的信號,低于100mV。機器人2(圖6)和機器人3(圖7)的J3軸信號差別較大,機器人2主要包含一個密集信號簇,以及加減速中的零星信號,其中密集信號幅度約120mV,低于機器人3中的500mV。機器人3中信號幅度大,但頻率低,在動作的往返階段都產生信號。機器人2 中密集信號頻率較規則,機器人3信號中沒有明顯的規律性,表明兩種信號的來源是不同的。
以上三臺機器人的事件計數和幅度信號與運行時間的分別對應關系如圖8、9。

圖6 機器人2的J3軸測試信號

圖7 機器人3的J3軸測試信號

圖8 事件計數與工作時間關系
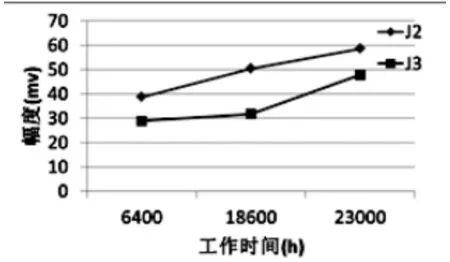
圖9 幅度與工作時間關系
從以上三個不同運行時間機器人的兩個主軸測試對比分析中可以發現以下規律:第一,聲發射信號的數量與結構故障的存在與否有密切的關系。3號機器人的J3軸全速運行中報警停機以及2號機器人J2中存在異常噪聲,這些位置的信號中都可以看到非常多的聲發射信號。而1號機器人狀態良好,測試中只有零星的信號。第二,聲發射信號的幅度與故障的發展程度有對應關系。2號和3號機器人的J2軸聲發射信號總體上非常類似,但前者的信號幅度低于后者,表明后者程度更為嚴重,這與其工作時間更長也是吻合的。對于J3 軸,3號機器人聲發射信號幅度也比2號機器人高。實際中3號機器人的J3軸全速運行時停機,故障程度也更嚴重。
第三,分析對比不同機器人的相同關節,聲發射信號的模式與故障類型可能存在一定的關系。2號和3號機器人的J3信號存在顯著差異,前者信號幅度小,但頻率穩定,后者幅度高,頻率無明顯規律,表明兩臺機器人J3軸的故障類型是不同的。
3.3 拆解驗證

圖10 軸承故障
結合機器人的運行記錄及聲發射理論分析,決定對3號機器人J3軸進行拆解驗證。拆解后發現其軸承滾動體與一側軸承外圈摩擦,有均勻磨損和壓痕(圖10)。證明聲發射理論分析和故障機理一致,說明采用聲發射技術研究機器人機械故障是可行的。
4 結語
本文進行了聲發射技術對機器人機械故障的預測研究,選取事件計數和幅度作為預測故障的主要參數,并通過對機器人的拆解驗證,確定聲發射技術可以預測機器人減速器機械故障。
同時,在研究中發現不同機器人之間存在信號模式的差異,可能與故障類型存在一定的關系。下一步將深入研究信號模式和故障類型之間的聯系。
[1]ISO22096-2006.聲發射用于機械狀態監測的總體指導建議.
[2]聲發射檢測.國防科技工業無損檢測人員資格鑒定與認證培訓教材編審委員會.機械工業出版社.
TH878
A
1671-0711(2017)09(上)-0083-04
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
