一種新型無人自轉旋翼機
2017-08-01 00:03:28王道波
兵器裝備工程學報 2017年7期
孫 瑜,王道波
(南京航空航天大學 自動化學院,南京 210016)
?
一種新型無人自轉旋翼機
孫 瑜,王道波
(南京航空航天大學 自動化學院,南京 210016)
設計了一種動力裝置采用矢量推力技術的無人自轉旋翼機,提高了機動性,降低了起飛距離,解決了自轉旋翼機巡航速度較低等問題;提出一種可促進自轉旋翼機機體在軍民中的有效應用的雙回路混合控制方法。
自轉旋翼機;矢量推力技術;混合控制;新構型無人機
自轉旋翼機的出現要早于直升機十幾年,20世紀20年代問世的自轉旋翼機C-3,最先實際應用是旋翼升力原理,自轉旋翼機在20世紀三四十年代曾被大量使用,后因直升機發展迅速,自轉旋翼機慢慢退出了人們的視野,由于自轉旋翼機具有結構簡單、成本低、安全性好、操縱簡單等特點,近年來再次引起航空界的關注,被廣泛地應用在軍事領域。進入21世紀以來自轉旋翼機方面的研究又有了長足的進展[1]。
盡管常規自轉旋翼機的研究在現有的理論基礎上已比較成熟[2-3],但是由于其結構和動力上的特點,常規自轉旋翼機巡航速度較低、機動性差,在軍用、民用領域都受到極大限制。為解決上述問題,目前采用最多的是傾轉旋翼方法[4]。雖然傾轉旋翼無人機可以有效地解決以上問題,但是其結構相當復雜,并且降低了機型的安全性和穩定性。
矢量推力技術對載人飛機的隱身性、機動性的改善已被廣泛驗證,矢量推力技術的應用已成為無人機發展的重要趨勢。本研究提出了一種無人自轉旋翼機,在取消了舵面控制、增大了機翼面積的同時[5],通過兩個矢量推力裝置協助,為飛行器提供垂直平面內的可變向推力,從而簡化結構、增強機動性、提高巡航速度,并實現超短距離起飛。這類機型為國內外首次出現。
1 設計思路
1.1 傳統自轉旋翼機
傳統自轉旋翼機是一種由旋翼自轉而非動力驅動獲得升力的旋翼類飛行器,一般帶有一個推進螺旋槳提供前進動力,在這方面和固定翼飛行器類似;在外形方面與直升機非常相似,但在原理和結構方面,自轉旋翼機和直升機卻有著本質的不同。由于自轉旋翼機的結構特點,其機動性、飛行高度和巡航速度都受到限制。
1.2 新型無人自轉旋翼機
針對現有自轉旋翼機的缺陷,分析自轉旋翼機特點,設計了一種新型自轉旋翼機[6]。在傳統自轉旋翼機的基礎上,取消舵面,增大機翼面積,在機翼頂端增加了一組矢量推進器,這使其在傳統的自轉旋翼機基礎上,具有超短距離起降、高機動性、快速飛行等特點。進一步改進,可在自轉旋翼槳尖增加起飛旋翼噴氣管。
在起飛階段,由于本機型配有起飛旋翼噴氣管,起飛旋翼噴氣管可以迅速獲得高壓氣流,使自轉旋翼轉盤獲得一定的起飛轉速,提高起飛升力,同時本機型的旋翼噴氣管較傳統預旋不僅輕便、隱藏性好,而且配備有快速解鎖脫鉤,可在飛機起飛時迅速解鎖。矢量推力可將螺旋槳向上偏轉一定角度,使得旋翼機實現超短距離起飛。另外,較傳統氣動力控制而言,采用雙矢量推進直接配合自轉旋翼氣動力形成混合力控制,增加了旋翼機的機動性。當旋翼機達到較高的飛行速度時,可由機翼提供一定的升力,減小了旋翼的迎風阻力,在矢量推力的協助下,實現高速飛行,新型無人自轉旋翼機原理樣機如圖1所示。

圖1 新型無人自轉旋翼機原理樣機
2 機體組成結構
新型無人自轉旋翼機由機身、機翼、變推力軸線動力裝置、自轉動旋翼裝置、機載航電系統組成,其結構示意圖如圖2。
2.1 機身
該型無人自轉旋翼機的機身由高強度玻璃纖維制成,內部包含電源、陀螺儀、GPS、控制箱等機載航電系統。需要注意合理分配內部空間,使其有效進行重力配平,使機體重心在軸線上。該型機身較其他固定翼飛機而言氣動對于飛機的影響較小,于是設計為隱身度較高的外形。由于該類機型以軍用為主,且日常巡航速度較低,可以在一定范圍內忽略機身外形的阻力,采用隱身度較高的氣動外形。另外,本機型取消機翼和尾翼的舵機控制,可以進一步簡化機體結構,增加機型的穩定性。
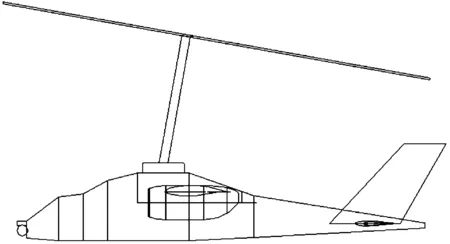
圖2 原理樣機結構示意圖
2.2 無舵面機翼
該型自轉旋翼機機身為隱身設計,在低速飛行時風阻的影響可以不考慮,但在高速飛行時所受阻力會大大增加。為了確保旋翼機在高速巡航時的飛行穩定,提高機型的軍事用途,設計無舵面機翼,在傳統旋翼機機翼結構的基礎上,取消舵面,增加兩側機翼面積。這使該型無人機轉旋翼機在高速飛行時,機翼可以提供較大升力,保證機身穩定飛行[7]。
2.3 電源
考慮到機身配平和和集成尺寸于便攜性,該型無人自轉旋翼機內部的電源采用27 V分散式超級鋰電池。該型電池不僅具有快充特點,而且可以將電池質量分散,可以有效地進行機體重心配平,同時,使用前,只需較短時間就可以充好電。機身上預留充電孔與充電控制開關。
2.4 變推力軸線動力裝置
變推力軸線動力裝置固定于安裝在機身兩側的無舵面機翼支撐桿軸上,支撐桿軸可以繞桿中點旋轉,推進機構與舵機相連,可以使此推進機構指向垂直平面內的任意方向,給機體提供推力矢量。另外,還設計有基于以DSP為核心的發動機控制系統,可以有效地控制發動轉速與動力分配,其主要包括核心控制板、溫度傳感器、轉速傳感器、油門舵機、執行機構等。
當機體作俯仰運動時,機身左右兩側的動力裝置同時產生正向/副向偏轉,產生的推力相對重心產生正向/副向力矩;當機體作滾轉運動時,機身左右兩側的動力裝置產生差動偏轉,產生的推力相對重心產生異向力矩。
2.5 模塊化飛控系統
為了保證無人自轉旋翼機的穩定性與高效能,本研究設計了模塊化的飛控系統,包括信號調理、電源分配、功率放大、核心處理、任務執行等,將每個功能模塊單獨設計并封裝硬件,配置統一接口,增加了整個系統的可移植性。
整個飛控系統以飛控計算機為核心,飛控計算機接收地面測控站發出的操控指令,通過指令選擇識別,將不同的指令信號進入對應的控制率解算回路,并將解算結果通過功率放大輸出給相應執行結構。同時,飛控計算機采集飛行參數信息,通過機載電臺與地面測控站通信,保證地面操縱人員有效控制。
3 混合控制方法與技術指標
3.1 混合控制方法
參考串級控制思路,采用如圖3所示混合控制策略,即在自轉旋翼槳盤氣動力的基礎上,增加推力變向直接力控制裝置[8]。本研究控制器裝置分為內環回路和外環回路,如圖4所示,內環回路是姿態回路,外環回路包括位置回路和高度回路。為使控制系統同時具有良好動態特性與阻尼特性,關于姿態控制均采取角位置與角速率雙閉環反饋控制回路[9]。
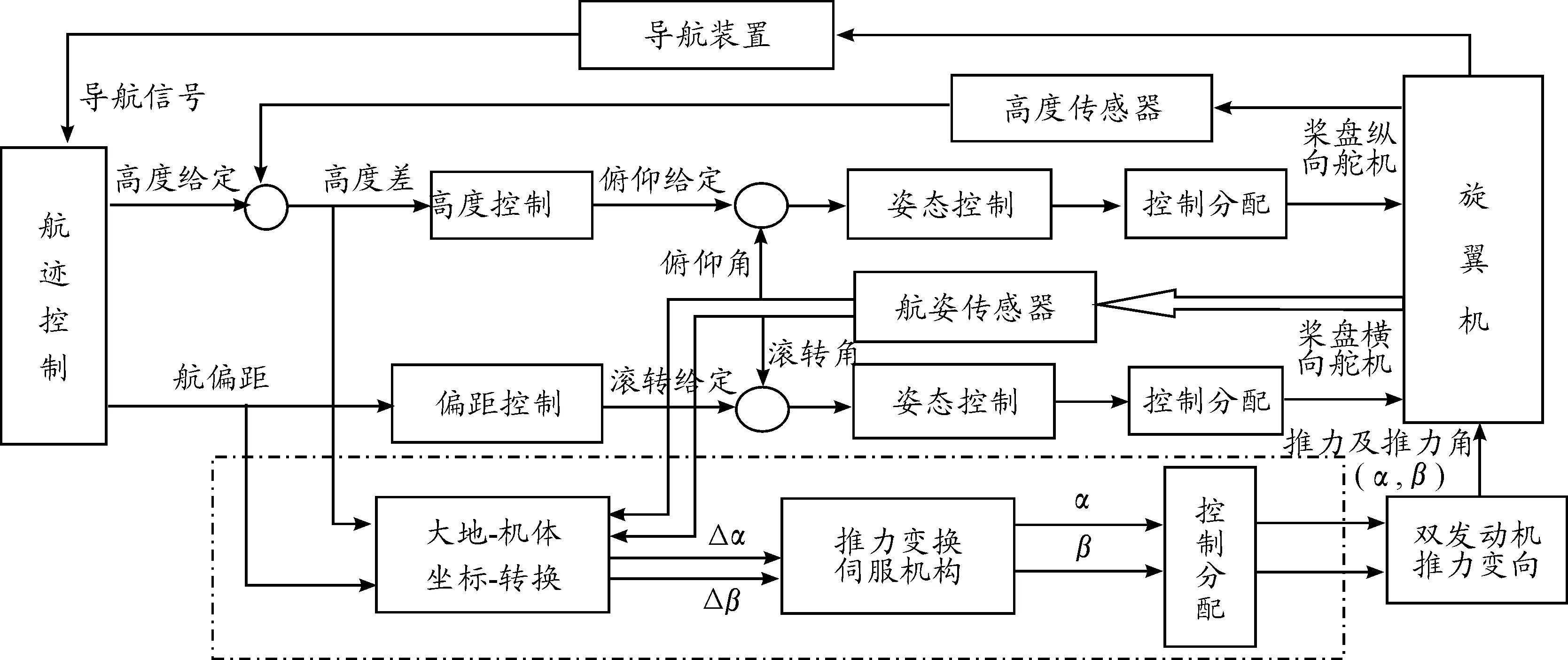
圖3 混合控制策略
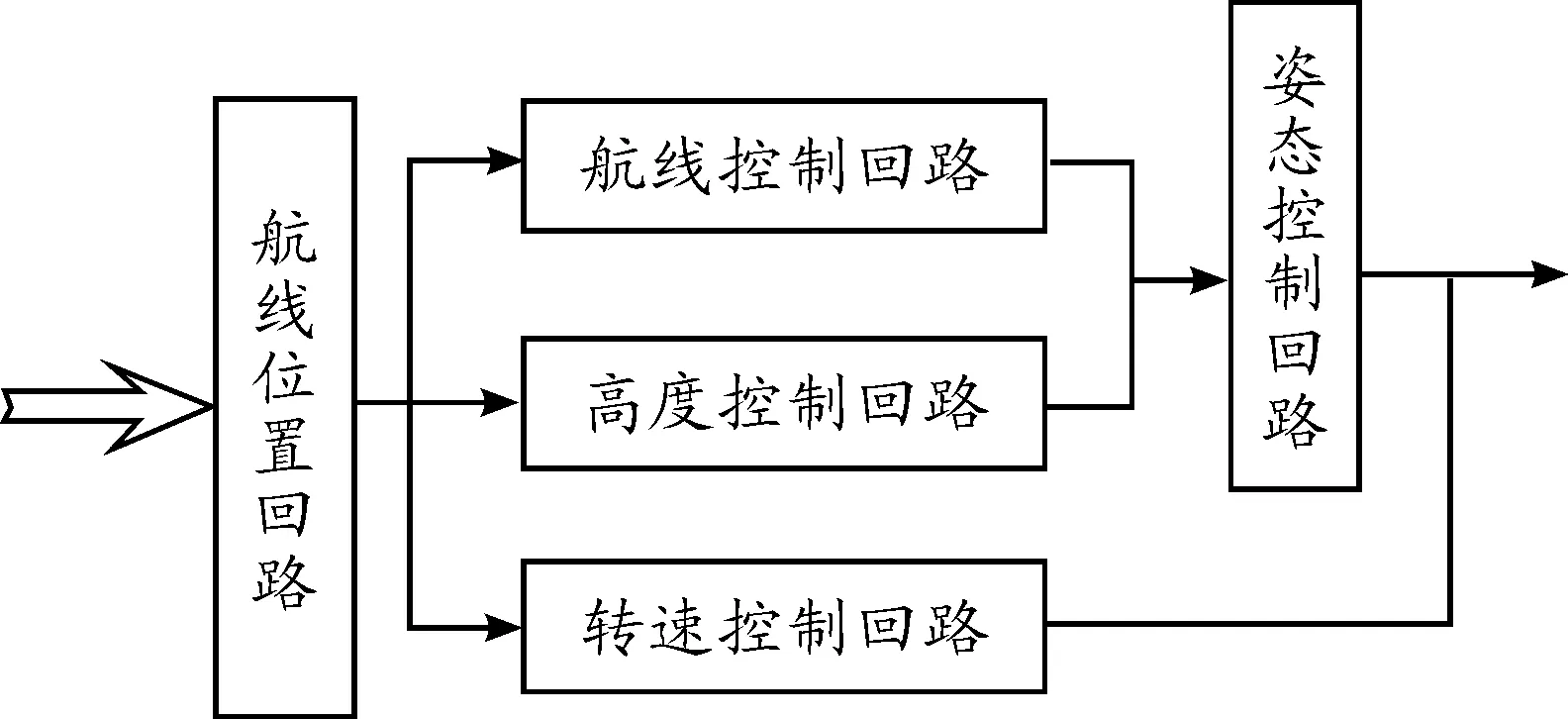
圖4 控制回路說明
3.2 戰術技術指標
考慮到成本問題,設計機型為縮比的原理樣機,所設計的實際機型質量約為250~300 kg,可攜帶40~50 kg載荷,飛行速度可達 250 km/h。縮比原理樣機技術指標如下[10]:
1) 起飛距離:小于15 m;
2) 爬坡坡度:50°左右;
3) 航向變化率:45°~60°;
4) 每秒轉彎半徑:最小約為120 m;
5) 飛行速度:約為20~40 m/s;
6) 機體滿油質量:35 kg;
7) 任務載荷:15~20 kg。
4 結論
由于本機型具有超短距離起降的特點,對于起降環境要求較低;又因其負載較大,可以在機體上安裝大型任務設備;同時,機動性大、允許巡航速度范圍廣,使得該機型可以完成多種任務。由于以上特點,本機型可用于軍用運輸、邊防巡查、艦載機、仿直升機特性靶機等;也可在惡劣環境下進行民用任務,如森林防火、農藥噴灑、航測、救災物資運輸等等。
[1] 王俊超,李建波,韓東.自轉旋翼機飛行性能理論建模技術[J].航空學報,2014,35(12):3244-3253.
[2] 王寅,王道波.在線滾動優化下的無人自轉旋翼機自動起飛控制[J].控制理論與應用,2015,32(11):1526-1533.
[3] 郭劍東,宋彥國.小型無人傾轉旋翼機氣動與操縱特性試驗研究[J].空氣動力學學報,2015,33(1):107-112.
[4] 陳嘉先,梁波.傾轉旋翼無人機模態轉換控制[J].戰術導彈技術,2015(2):70-76.
[5] 王俊超,李建波.機翼對自轉旋翼機縱向穩定性的影響[J].航空學報,2014,35(1):151-160.
[6] 陳淼.自轉式無人旋翼機飛行控制技術研究[D].南京:南京航空航天大學,2011.
[7] 黃俊.飛機最優巡航條件的確定[J].飛行力學,1996(2):60-64.
[8] 浦黃忠,甄子洋,黃國勇,等.變推力軸線無人機的混合姿態控制[J].南京理工大學學報,2010,34(5):596-601.
[9] 黃國勇,甄子洋,王道波.變推力軸線無人機的建模與機敏性分析[J].南京航空航天大學學報,2010,42(2):170-174.
[10]溫瑞英,魏志強,王紅勇,等.民用飛機巡航性能計算研究[J].飛行力學,2015,33(4):289-292.
(責任編輯 周江川)
A New Type of Auto-Rotating Rotor UAV
SUN Yu, WANG Daobo
(College of Automation, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China)
This paper designs a new type of auto-rotating rotor UAV. It improves the maneuverability of the auto-rotating rotor UAV, and reduces the takeoff distance, and solves the problem of low cruise speed. The new type of auto-rotating rotor UAV using vector thrust technology. A double loop hybrid control method is proposed. This can promote the effective application of the typical rotor body in military and civilian.
rotational rotorcraft; vector thrust technology; hybrid control; new configuration of UAVs
10.11809/scbgxb2017.07.018
2017-03-15;
2017-04-20
江蘇省研究生培養創新工程(SJLX16_0100);研究生創新基地(實驗室)開放基金(kfjj20160323)
孫瑜(1990—),男,碩士研究生,主要從事無人機控制系統研究。
format:SUN Yu, WANG Daobo.A New Type of Auto-Rotating Rotor UAV[J].Journal of Ordnance Equipment Engineering,2017(7):82-84.
TJ85;V271.4
A
2096-2304(2017)07-0082-03
本文引用格式:孫瑜,王道波.一種新型無人自轉旋翼機[J].兵器裝備工程學報,2017(7):82-84.
