基于主動橫向穩定桿的汽車側翻混雜控制研究*
2017-07-21 01:21:44陳松夏長高潘道遠陶金忠
汽車工程 2017年6期
關鍵詞:舒適性
陳松,夏長高,潘道遠,陶金忠
(1.江蘇大學汽車與交通工程學院,鎮江212013;2.南通航運職業技術學院,南通226010; 3.安徽工程大學機械與汽車工程學院,蕪湖241000)
基于主動橫向穩定桿的汽車側翻混雜控制研究*
陳松1,2,夏長高1,潘道遠3,陶金忠2
(1.江蘇大學汽車與交通工程學院,鎮江212013;2.南通航運職業技術學院,南通226010; 3.安徽工程大學機械與汽車工程學院,蕪湖241000)
針對車輛在側向加速度與路面不平干擾時,容易發生側翻和影響乘坐舒適性的問題,本文中設計了一種主動橫向穩定桿裝置。為滿足車輛在各行駛工況下的性能要求,提出了采用混雜控制方法對不同工況下的車輛進行控制。在緊急轉向或不平路面工況時,為防止車輛側翻和提高車輛的乘坐舒適性,分別利用線性二次型最優控制理論設計了控制器,并采用微粒群優化算法對控制器的權系數進行優化。在此基礎上建立了整車控制模型,并通過臺架試驗驗證所建模型的正確性。最后對采用主動橫向穩定裝置控制的車輛進行了一系列時域和頻域仿真,結果表明,該方法能根據車輛不同的行駛工況有效避免車輛側翻,且明顯改善了車輛的乘坐舒適性。
主動橫向穩定桿;混雜控制;側翻;乘坐舒適性;線性二次型最優控制;粒子群優化
前言
汽車轉向或路面不平干擾時,傳統橫向穩定桿無法實時調整懸架側傾剛度,對于質心較高的車輛,容易引起汽車車身出現過大的側傾和增加車輛垂直方向的加速度與位移,影響汽車的行駛安全性與乘坐舒適性。由于主動橫向穩定桿(AARB)能根據汽車的轉向行駛狀況,適時地改變懸架的側傾剛度,減小車輛的側傾,能更直接、有效地避免車輛側翻的出現,同時主動橫向穩定桿還具有低成本、易于實現等特點,已成為研究的熱點。文獻[1]中提出了一種電動液壓控制的主動橫向穩定桿,采用前、后主動橫向穩定桿的雙回路控制系統,通過仿真與試驗驗證該主動橫向穩定桿能有效控制車輛的側傾。文獻[2]中提出了一種電動控制式的主動橫向穩定桿,建立了單自由度車輛動力學模型,采用滑模變結構控制理論來控制車輛的側翻。文獻[3]和文獻[4]中基于側向加速度分別采用PID與模糊PID控制,實現主動橫向穩定桿對車輛側傾的控制。文獻[5]中為輕型商用車設計一種液壓控制的主動橫向穩定桿,采用了LQ控制理論實現側傾控制所需的力矩。文獻[6]中針對空氣懸架客車側傾穩定性差的特點,采用變剛度橫向穩定桿,并給出了前、后懸架變剛度橫向穩定桿角剛度關系式,通過仿真表明該裝置能夠在幾乎不影響車輛的平順性前提下,有效控制車身側傾。
以上對主動橫向穩定桿的研究都集中于車輛在轉向工況下,采用AARB來減小車輛的側傾角與側傾角速度,從而控制車輛的側傾,而沒有考慮車輛直線行駛在不平路面時,由于受路面不平的干擾,會使車身側傾角加速度、懸架與輪胎的動行程增加,這些參數的變化會影響車輛的乘坐舒適性。由于車輛行駛的工況經常發生變化,AARB應針對不同工況采用不同的控制策略以滿足不同的性能需求。由于采用的控制策略是連續動力學行為,而車輛不同工況的變化具有離散性,故基于主動橫向穩定桿對車輛的控制系統具有混雜特性[7-8],本文中基于此,自主設計了電動主動橫向穩定桿裝置,針對車輛不同的行駛工況,采用混雜控制方法來控制車輛側翻與改善車輛的乘坐舒適性。
1 AARB裝置及車輛動力學模型
1.1 AARB裝置
圖1所示為電動主動橫向穩定桿(AARB)結構示意圖,由直流電機、左右諧波齒輪減速齒輪機構、左右穩定半桿、左右穩定半桿連接臂等組成。電機的電樞軸與左、右兩側諧波齒輪中的波發生器相連,故兩側的諧波齒輪傳動中,波發生器均為輸入。其中左側諧波齒輪的柔輪固定于底盤,剛輪為輸出;右側諧波齒輪的剛輪固定于底盤,柔輪為輸出;設Z4,Z3,Z'4,Z'3分別為左、右剛輪與柔輪齒數,且取Z4= Z3+2,Z'4=Z'3+2(2為剛輪與柔輪的齒數差)。則左側和右側的諧波齒輪傳動比分別為

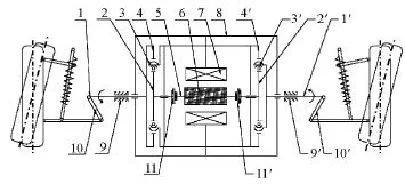
圖1 主動橫向穩定桿結構示意圖
為使左、右穩定半桿經諧波傳動后輸出的力矩大小相等,方向相反,選取Z'3=Z4,此時ih=-i'h,即左、右諧波齒輪的傳動比大小相等,傳動方向相反。當汽車轉向行駛時,控制器根據車速、車身側傾角和側向加速度等傳感器信號控制電機輸出轉矩,電機的電樞軸通過與之相連的左、右諧波齒輪機構帶動左、右穩定半桿產生相對扭轉,從而形成轉矩阻止車身的側傾;當汽車某一車輪突遇不平路面時,控制器根據路面情況控制電機輸出轉矩,通過與之相連的左、右諧波齒輪機構和左、右穩定半桿產生轉矩來控制車輛側傾角加速度和懸架與輪胎的垂直跳動量。同時使該側電磁離合器接合,另一側的電磁離合器斷開來實現解耦控制,改善車輛乘坐舒適性。
1.2 車輛動力學模型的建立
建立包括車身的垂向運動、側傾和4個車輪的垂向運動在內的6自由度整車動力學模型,如圖2所示。
圖2中:ms為簧載質量;Ix為車身繞x軸的轉動慣量;zs1,zs2,zs3,zs4為各懸架對應簧上質量的垂直位移;ks1,ks2,ks3,ks4為懸架系統等效剛度;bs1,bs2,bs3,bs4為懸架系統等效阻尼;kt1,kt2,kt3,kt4為輪胎動剛度;mu1,mu2,mu3,mu4為簧下質量;zu1,zu2,zu3,zu4分別為各輪胎的變形量;zr1,zr2,zr3,zr4分別為各車輪對應的路面輸入;zc為車身質心的垂直位移;為側傾角; tw為輪距;ay為側向加速度。
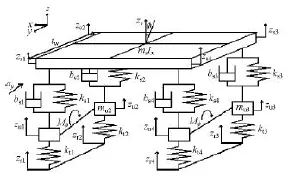
圖2 整車側傾動力學模型
該車前、后懸架都裝有主動橫向穩定桿裝置,為維持車輛的轉向特性不變,前、后主動橫向穩定桿產生的力矩比值α為定值[6],即

在整車模型中,各車輪對應的路面輸入zr1,zr2,zr3,zr4和側向加速度ay為干擾,主動橫向穩定桿產生的力矩為輸入,則由該力矩產生作用在前、后懸架上的力為

各懸架對車身的作用力分別為

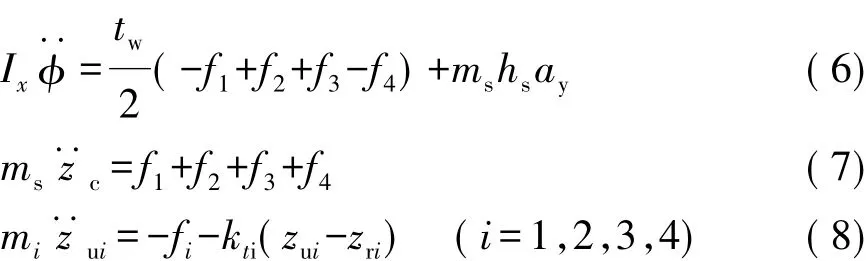
則根據圖2所示模型,得到車輛動力學方程為
各所在懸架與車身連接點處的垂向位移Zsi(i= 1,2,3,4)分別為
由于側傾角較小,故sin≈,上式可表示為
其中:
整車動力學方程式(3)~式(8)可改寫為

其中:

將式(11)和式(12)改成矩陣形式:
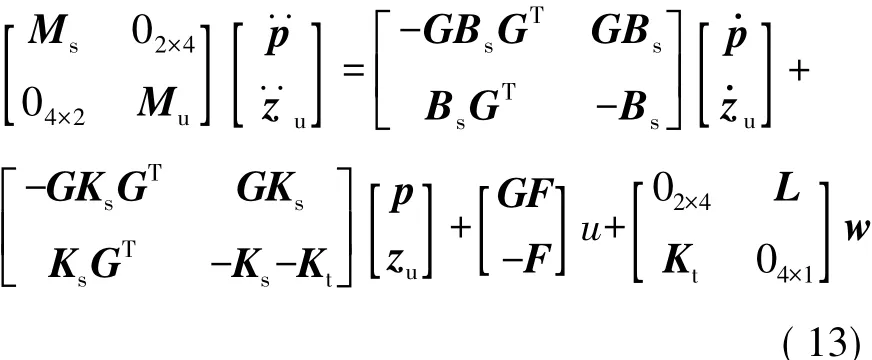
其中w=[z,z,z,z,a]T
r1r2r3r4y
將上式進一步化簡為

其中:
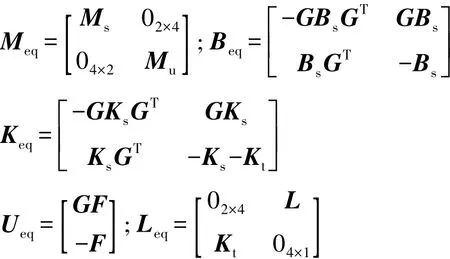
最后,整車動力學的狀態方程為

其中:

2 AARB混雜控制系統設計
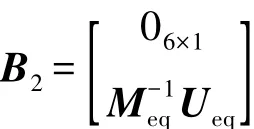
根據AARB起作用的條件,將車輛的行駛工況分為轉向行駛的側傾控制與直線行駛在不平路面的乘坐舒適性控制。根據車輛的不同行駛工況,采用如圖3所示的多控制器切換的混雜控制系統,切換控制條件如圖4所示。

圖3 汽車AARB控制切換流程圖
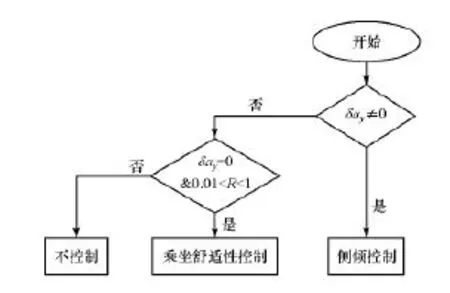
圖4 汽車AARB切換控制
由于車輛的側向加速度需經計算得到,為保證控制的準確性與靈敏性,需將轉向盤轉角δ作為判斷車輛轉向側傾的一個重要參數,同時為排除在原地轉向時,車輛沒有出現側傾的情況,需將側向加速度ay作為判斷車輛轉向側傾的另一個重要參數,故采用側傾控制的切換條件為δay≠0。
在不平路面上的乘坐舒適性控制的切換條件為0.01<R<1(cm2·circle/m)且δay=0。

式中:R為路面等級系數;M和m分別為簧載與非簧載質量;C為阻尼系數;Y 為懸架動行程均方值;v為車速。當0.01<R<1(cm2·circle/m)為較差路面[9]。
2.1 AARB側傾控制
車輛在轉向時,由于受側向加速度的干擾,會產生側傾,過大的側傾會引起車輛的側翻。為控制側向加速度對車輛側傾的影響,需對車輛輸出的側傾角速度、側傾角、載荷橫向轉移率進行控制,同時考慮主動橫向穩定桿裝置的電機能耗問題,盡量提供較小的反側傾力矩,據此建立的性能指標為
式中:ILTR為車輛橫向載荷轉移率;FL,FR分別為左、右輪垂向載荷;H為質心的高度;h為側傾中心到質心的距離;ILTR取值范圍為[-1 1]。當ILTR=0時,左、右車輪垂直載荷相等,車輛沒有發生側翻;當ILTR=±1時,表明某一側車輪垂直載荷為0,車輛可能發生側翻[10]。
輸出變量:

其中:y=[φ,·φ,ILTR,u]T
將系統的輸出方程代入式(17),則性能指標轉化為

式中:Q=CTqC為狀態變量的加權矩陣;R=D1TqD1+r為控制輸入量的加權矩陣;q=diag(q1q2q3),q1= ρ1,q2=ρ2,q3=ρ3,r=ρ4;N=CTqD1為交叉項的權陣。
則最優控制規律為

本文中采用粒子群優化算法得出最優的K。
2.2 控制參數的微粒群優化
Q和R加權矩陣的選擇是設計具有二次性能指標的最優控制器的關鍵[11]。對于權系數較少的最優控制器可采用試湊法。當最優控制器權系數較多時,采用粒子群算法對控制器的權系數進行優化,可節省控制器設計的時間并避免設計過程的主觀性。
微粒群優化(particle swarm optimization,PSO)是一種生物進化優化算法[12]。假設第i個微粒的位置和速度分別為xi=(xi,1xi,2…xi,d)和vi= (vi,1vi,2…vi,d),其中d為優化目標中變量的個數。在算法的每次迭代中,采用性能指標J作為適應度函數來評價粒子的好壞,微粒通過跟蹤兩個最優解來更新自己,一個是微粒本身的最優解pi= (pi,1pi,2…pi,d),其適應值記為pbest;另一個是所有微粒當前找到的最優解pg=(pg,1pg,2…pg,d),其適應值記為gbest,在得到這兩個適應值時,每個微粒根據式(22)和式(23)來更新其速度和位置:

式中:j=1,2,…,d;c1和c2為學習因子;w為慣性權重因子;r1和r2為0到1之間的隨機數。
為平衡算法的全局搜索能力和局部改良能力,慣性權重w隨微粒目標適應值而自動改變。
式中:wmax和wmin分別為w的最大值和最小值;f為微粒當前的適應值;favg和fmin分別為當前所有微粒的平均適應值和最小適應值。
本文中根據控制器權系數的優化目標和約束條件,采用微粒群優化算法,編寫Matlab計算程序。微粒群優化算法運行參數:通過多次離線學習,得出微粒種群大小24,微粒大小8,最大迭代次數80,學習因子c1=c2=2,慣性權重因子w的最小值wmin= 0.35、最大值wmax=0.85,最大微粒速度取微粒搜索范圍的20%。優化計算得到的ρ1,ρ2,ρ3和ρ4分別為1.3982×105,3.2402×106,30和1.0×10-6。
2.3 AARB舒適性控制
車輛直線行駛在不平路面時,受路面不平的干擾,會增加車身側傾角加速度、懸架和輪胎的垂向跳動量,這將會影響車輛的乘坐舒適性。為控制路面不平對車輛乘坐舒適性的影響,需對車輛輸出的車身側傾角加速度、懸架和輪胎的動行程進行控制,同時考慮主動橫向穩定桿裝置的電機能耗問題,盡量提供較小的反側傾力矩,據此建立的性能指標為


輸出變量:

其中:


式中:Q'=CTq'C為狀態變量的加權矩陣;R'= D1
Tq'D1+r'為控制輸入量的加權矩陣,q'= diag(q'1q'2q'3),q'1=ρ'1,q'2=ρ'2,q'3=(ρ'3ρ'3ρ'3ρ'3),r'=ρ'4;N'=CTq'D1為交叉項的權陣。
則最優控制規律為

此處同樣采用粒子群算法得出最優的K',優化得到的ρ'1,ρ'2,ρ'3,ρ'4分別為540.2064,10,50,1.0×10-6。將系統的輸出方程代入式(25),則性能指標轉化為
3 AARB臺架試驗
車輛轉向側傾時,側向加速度會引起側傾力矩。若要維持車輛平穩,則AARB與懸架系統所產生的側傾反力矩之和必須與之平衡。圖5為車輛前AARB臺架試驗裝置圖,固定主動橫向穩定桿的一端,另一端通過液壓加載器進行加載,用來模擬不同側向加速度下產生的側傾力矩Mroll=mshsay,在不同側傾力矩下測量AARB輸出的力矩值MA。

圖5AARB臺架試驗裝置圖
為得到前、后AARB對整車產生的側傾反力矩M,結合式(3)可得
式中b為前橫向穩定半桿至連接臂的垂直距離。
圖6為側向加速度ay和AARB產生的側傾反力矩M的試驗與仿真結果對比圖,圖中ay=Mroll/ mshs。
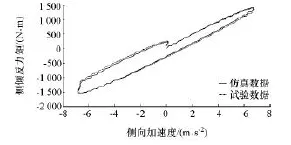
圖6 側向加速度和側傾反力矩試驗與仿真結果對比圖
由圖6可見,隨著側向加速度的變化,仿真得到的曲線與試驗得出的曲線基本吻合,驗證了所建仿真模型的正確性。
4 仿真結果分析
為便于比較,分別對側傾控制系統、乘坐舒適性控制系統和被動橫向穩定桿系統進行頻域仿真分析。圖7為在側向加速度干擾下的側傾運動的頻域仿真,其中在側向加速度干擾下車輛響應頻率在0.5~1.5Hz之間。在側向加速度干擾下,由圖7(a)和圖7(b)可知,在0.5~1.5Hz范圍內,經粒子群優化(圖中為AARB)的主動橫向穩定桿相比于被動穩定桿(圖中為Open Loop)能產生更大的反側傾力矩,在側傾角和側傾角速度方面有明顯的改善,故在車輛側傾控制方面,主動橫向穩定桿優于被動橫向穩定桿,從而有效防止車輛側翻的發生。

圖7側向加速度干擾下的頻域仿真
圖8 為在路面不平干擾下的頻域仿真結果。其中在路面不平干擾下車輛的響應頻率在1~15Hz之間。從圖8(a)和圖8(b)中可知,在該頻率區間,由于主動橫向穩定桿通過獨立控制左、右兩側的電磁離合器的接合與斷開使得兩側車輪的跳動相互獨立,故經粒子群優化的主動橫向穩定桿在車身側傾角加速度方面有較大的改善;但由于主動橫向穩定桿與被動橫向穩定桿的懸架彈簧和減振器相同,導致主動橫向穩定桿在懸架動行程方面改善較小。總體而言,在車輛的乘坐舒適性控制方面,主動橫向穩定桿系統優于被動橫向穩定桿系統。

圖8 路面不平干擾下的頻域仿真
由于車輛在不同的行駛工況下分別受側向加速度和路面不平干擾時,主動橫向穩定桿在側傾控制和抑制車身側傾角加速度、懸架和輪胎的垂直跳動量方面,比被動系統均有較大的改善,故基于混雜控制的AARB能根據車輛行駛工況的變化,有效提高車輛的行駛安全性與乘坐舒適性。
為進一步驗證基于混雜控制的主動橫向穩定桿在側翻控制與改善乘坐舒適性方面的效果,本文中分別采用兩種工況下的時域仿真。第一種為轉向盤魚鉤輸入下的仿真,對應車速為80km/h,行駛在附著系數為0.8的良好路面上,轉向盤轉角輸入如圖9所示,該仿真用于驗證側翻控制的效果。第二種為車輛的左前輪滾過路面一凸起物工況下的仿真,用于驗證車輛的乘坐舒適性。其中仿真的路面干擾[13]為

式中:c=hb/2,hb為路面凸起物的高度,hb=0.06m;t為時間,s。為便于比較,分別對不施加控制的被動系統(圖中為Open Loop)與主動橫向穩定桿(圖中為AARB)控制系統進行仿真比較。
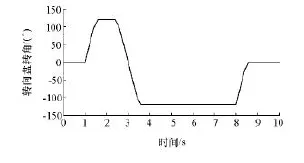
圖9轉向盤轉角魚鉤輸入
圖10 ~圖13所示為魚鉤輸入下,裝有被動橫向穩定桿與裝有主動橫向穩定桿的車輛在側傾控制方面的效果對比圖。
由圖10和圖11可見,經粒子群優化的主動橫向穩定桿在車輛的側傾角與側傾角速度方面比被動橫向穩定桿有了明顯的改善,能有效減小車輛的側傾。由圖12可見,在魚鉤轉向輸入下,采用被動橫向穩定桿的車輛由于側傾角過大,導致車輛橫向載荷轉移率LTR接近1,即車輛存在側翻的危險。采
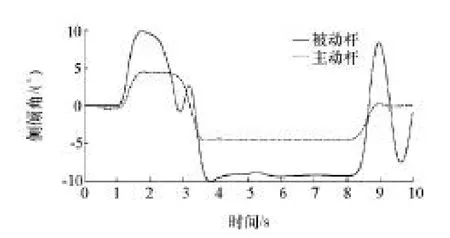
圖10 魚鉤輸入下車身側傾角

圖11 魚鉤輸入下車身側傾角速度
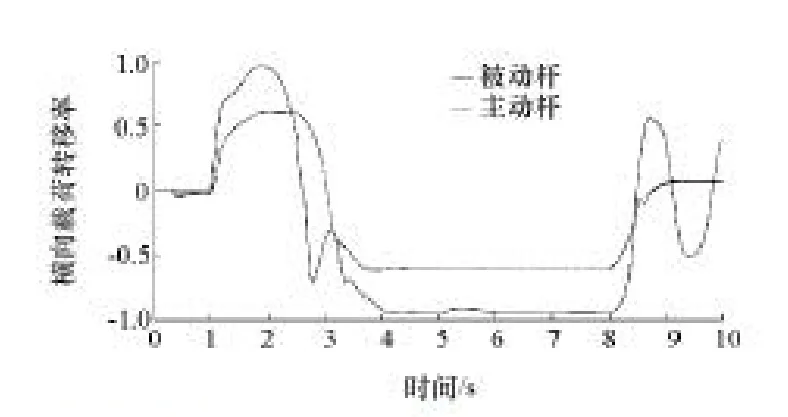
圖12 魚鉤輸入下橫向載荷轉移率(LTR)

圖13 魚鉤輸入下側向加速度與側傾角的關系圖
用主動橫向穩定桿裝置的車輛的LTR最大值不到0.6,故裝有主動橫向穩定桿控制的車輛具有較好的抗側翻能力。由圖13可見,在魚鉤輸入下,具有主動橫向穩定桿的車輛的側向加速度的大小位于[-8,8]區間,側傾角的大小位于[-4,4]區間,兩者的變化具有近似線性特性,滿足良好的車輛側傾反饋特性以實現駕駛員對車身姿態的判斷[14]。而由被動橫向穩定桿的側向加速度與側傾角的關系圖可以發現,采用被動橫向穩定桿控制的車輛側傾角較大且存在較大波動,造成駕駛員緊張,同時存在側翻的危險,故不能有效保證車輛的安全性。
圖14為在不平路面干擾下的時域仿真。由圖14(a)可見,在路面干擾下,經粒子群優化的主動橫向穩定桿,在減小車身側傾角加速度方面的效果比被動橫向穩定桿明顯,由圖14(b)和圖14(c)可見,在懸架與輪胎動行程方面略有改善,這與頻域分析的結果一致。故經粒子群優化的主動橫向穩定桿比被動橫向穩定桿有更好的乘坐舒適性。在時域仿真分析中,基于混雜控制的主動橫向穩定桿系統,在受路面不平與側向加速度干擾時,能有效避免車輛的側翻與改善車輛的乘坐舒適性。
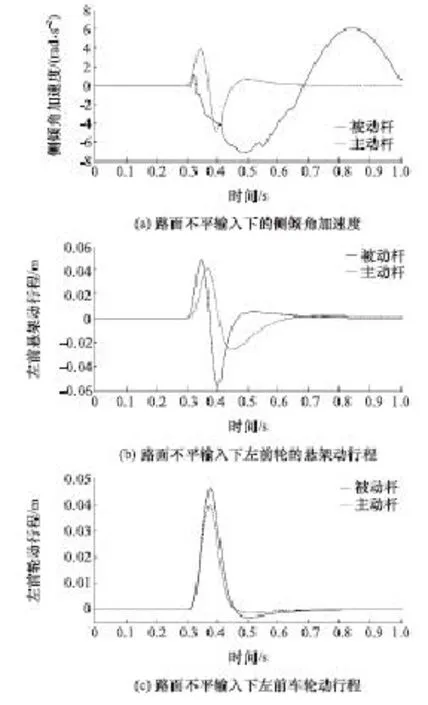
圖14 不同路面干擾下的時域仿真
5 結論
(1)針對車輛在側向加速度或路面不平干擾時,容易發生側翻和使車輛舒適性變差的問題,自主設計了主動橫向穩定桿裝置。
(2)為滿足車輛行駛工況經常變化時對車輛側翻的控制與乘坐舒適性的改善,提出了采用混雜控制方法,分別針對側翻與乘坐舒適性控制,設計了二次線性最優控制器。根據控制器權系數的優化目標,采用微粒群優化算法對控制器權系數進行了優化,在此基礎上建立了整車控制模型,并通過臺架試驗驗證所建模型的正確性。
(3)通過時域、頻域仿真發現,基于混雜控制的主動橫向穩定桿在避免側翻與改善車輛舒適性方面明顯優于被動橫向穩定桿系統,使得車輛的整體性能得到了明顯的改善。
[1]GAFFNEY E,KEANE J,NICOLS J.High efficiency 2 channel active roll control system[C].SAE Paper 2009-01-0222.
[2]JEON K,HWANG H,CHOI S,et al.Development of an electric active rollcontrol(ARC)algorithm for a SUV[J].International Journal of Automotive Technology,2012,13(2):247-253.
[3]鄭恩瑞,夏長高,陳松.基于主動橫向穩定器的車輛穩定性研究[J].機械科學與技術,2015,12(27):1952-1955.
[4]周兵,呂緒寧,范璐,等.主動懸架與主動橫向穩定桿的集成控制[J].中國機械工程學報,2014,25(14):1978-1983.
[5]VARGA B,NEMETH B,GASPAR P.Control design of anti-roll bar actuator based on constrained LQ method[C].IEEE International Symposium on Computational Intelligence&Informatics,2013-11-19.
[6]李俊偉,唐應時,王為才,等.應用變剛度橫向穩定桿的客車側傾控制[J].現代制造工程,2012,8(27):12-16.
[7]尹安東,趙韓,孫駿,等.基于混雜系統理論的混合動力汽車驅制動控制研究[J].汽車工程,2015,37(10):1150-1155.
[8]范鑫,趙景波,貝紹軼,等.汽車電動助力轉向系統的混雜控制與試驗[J].傳感器與微系統,2010,29(11):90-97.
[9]郭孔輝,余五輝,章新杰,等.自適應半主動懸架系統控制策略[J].湖南大學學報(自然科學版),2013,40(2):39-44.
[10]李振.基于主動橫向穩定桿的汽車防側翻控制[J].北京汽車,2015,5(4):11-14.
[11]PETER J N,NEILD S A,WAGG D J.Quasi-active suspension design using magnetorheological dampers[J].Journal of sound and vibration,2011,330(10):2201-2219.
[12]郭迎慶,徐趙東,費樹岷,等.磁流變智能結構的微粒群優化控制[J].振動與沖擊,2011,30(9):59-63.
[13]YIM Seongjin.Design of a rollover prevention controller with differential game theory and a coevolutionary genetic algorithm[J].Journal of Mechanical Science and Technology,2011,25(6): 1565-1571.
[14]LINDVAI-SOOS D.Function development process of the electric anti-roll-stabilizer eARS[R].Ontario:Project House of Magna,2008.
A Study on Hybrid Rollover Control of Vehicle with Active Anti-Roll Bar
Chen Song1,2,Xia Changgao1,Pan Daoyuan3&Tao Jinzhong2
1.School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang212013;2.Nantong Shipping College,Nantong226010; 3.School of Mechanical and Automotive Engineering,Anhui Polytechnic University,Wuhu241000
In view of that when running with a lateral acceleration or passing over a bump with its left or right wheel,the vehicle is prone to rollover or at least with its ride comfort affected,an active anti-roll bar(AARB) is designed,and to meet the performance requirements of vehicle in various driving conditions,a hybrid control scheme is proposed.Then for preventing rollover and enhancing ride comfort of vehicle,specific controller is designed for emergent turn or bump passing respectively by applying linear quadratic optimal control theory,with weighing parameters of controller optimized using particle swarm optimization algorithm.On this basis,a vehicle control model is established and verified to be correct by bench test.Finally,a series of time-domain and frequency-domain stimulations are carried out on the vehicle equipped with AARB,and the results show that the scheme proposed can effectively prevent the rollover and significantly improve the ride comfort of vehicle according to different driving conditions.
active anti-roll bar;hybrid control;rollover;ride comfort;linear quadratic optimal control;particle swarm optimization
10.19562/j.chinasae.qcgc.2017.06.010
*國家自然科學基金(51575001)和江蘇省普通高校研究生科研創新計劃項目(CXLX12_0629)資助。
原稿收到日期為2016年8月31日。
夏長高,教授,E-mail:xiacg@ujs.edu.cn。
猜你喜歡
福建輕紡(2022年4期)2022-06-01 06:26:06
載人航天(2021年5期)2021-11-20 06:04:36
毛紡科技(2021年8期)2021-10-14 06:51:26
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
紡織科技進展(2021年3期)2021-06-09 08:07:18
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
工業設計(2016年11期)2016-04-16 02:48:02
消費者報道(2016年3期)2016-02-28 19:07:32
汽車實用技術(2015年8期)2015-12-26 09:01:02