“8”字型無碳小車起始定位工具的設計
2017-07-19 17:57:30李建波張洪銘李佺
卷宗 2017年11期
關鍵詞:調試
李建波+張洪銘+李佺
摘 要:全國大學生工程訓練綜合能力競賽是教育部高等教育司發文舉辦的全國性大學生科技創新實踐競賽活動,其競賽主題是無碳小車的設計與制作,共分為三類,分別是“S”型賽道避障行駛競賽,“8”字型賽道避障行駛競賽,重力勢能驅動的自控行走小車越障競賽。本文介紹的工具是用于“8”字型賽道避障行駛競賽中,確定無碳小車的出發位置。
關鍵詞:工程訓練綜合能力競賽;“8”字型;無碳小車;起始定位
全國大學生工程訓練綜合能力競賽是教育部高等教育司發文舉辦的全國性大學生科技創新實踐競賽活動,是基于國內各高校綜合性工程訓練教學平臺,為深化實驗教學改革,提升大學生工程創新意識、實踐能力和團隊合作精神,促進創新人才培養而開展的一項公益性科技創新實踐活動。[1]其中的“8”字型賽道避障行駛競賽是要求無碳小車的行進軌跡繞中心兩桿周期性往復運動,使其軌跡成“8”字。為使小車能周期性行走“8”字型軌跡,就需要小車從出發位置行進之后每走一圈都能使其軌跡盡可能重疊,以避免撞到所設障礙。小車行進的軌跡由出發時小車所放置的位置以及小車三個車輪所放置的狀態決定,因此小車起始位置的確定對于小車行走“8”字型軌跡圈數的多少十分重要。
1 什么是無碳小車
無碳小車是以重力勢能驅動的具有方向控制功能的自行小車。驅動其行走及轉向的能量是根據能量轉換原理,由給定重力勢能轉換而得到的。該給定重力勢能由競賽時統一使用質量為1Kg的標準砝碼(¢50×65 mm,碳鋼制作)來獲得,要求砝碼的可下降高度為400±2mm。標準砝碼始終由小車承載,不允許從小車上掉落。
2 競賽規則介紹
無碳小車是以重力勢能為唯一能量的、具有連續避障功能的三輪小車,其中“8”字型賽道避障行駛競賽的競賽場地在半張標準乒乓球臺(長1525mm、寬1370mm)上,有3個障礙成“L”形放置, “L”形的長邊在球臺的中線上,(放置球臺時“L”形的長邊平行主看臺方向,短邊垂直且遠離主看臺),經現場公開抽簽,在400~500mm范圍內產生“L”形的長邊值,在300±50mm范圍內產生“L”形的短邊值。小車需繞中線上的兩個障礙物按“8”字型軌跡運行,障礙物為直徑20mm、長200mm的3個圓棒,圓棒中心分別放置在“L”形的3個端點上,以小車完成8字繞行圈數的多少來評定成績。參賽時,要求小車以“8”字形軌跡交替繞過中線上2個障礙,保證每個障礙在“8”字形的一個封閉環內,同時不碰倒第3個障礙。一個成功的“8”字繞障軌跡為:兩個封閉圖形軌跡和軌跡的兩次變向交替出現,變向指的是:軌跡的曲率中心從軌跡的一側變化到另一側。
3 起始定位的作用
無碳小車能夠周期性的按照“8”字型軌跡避障行駛,一方面取決于小車的加工精度、裝配精度,在小車的精度得到保障的前提下,小車才能在后續的調試過程中按照預先設計的軌跡行走,此外,當小車本身的精度有所欠缺時,它的行進軌跡每次都會有偏差,隨著小車的行進逐漸撞到所設障礙。因此,后續的調試至關重要。有些誤差在調試時可以得到相應的彌補,使其對小車行駛過程的影響降到最小。起始位置的確定是運動調試很重要的一個方面,一旦小車起始位置沒有選擇好或者在放置小車時稍有偏差,就會使小車很快撞到障礙物。當小車軌跡存在一定偏差時,可以調整小車的初始位置使小車盡可能的行駛更多的“8”字形軌跡,例如小車軌跡每次都向左偏斜,就可以調整小車的初始位置,使小車行駛的第一圈盡可能的往右偏,這樣小車誤差累積的時間就會延長,就能行走更多的“8”字形軌跡而不會撞到障礙物。
現在的起始位置確定更多的是憑借人在反復調試時所積累的經驗,靠人的感覺進行確定,由于每次拆卸重新組裝后,小車的狀態都會有所差別,因此單憑經驗既不科學也不可靠,并且還會出現放置小車時由于人的抖動改變了小車的狀態,使小車行駛的軌跡無法確定,很容易造成小車一出發就撞桿的后果。
4 定位工具的設計思想
小車的起始定位首先是基準的建立,因為小車所要繞行的兩個桿是固定不動的,因此以這兩根桿的位置為參考點,通過所設計的定位尺確定小車與它所要繞行的第一根桿的相對位置,這樣就確定了小車的位置基準。此外,小車的出發狀態由前輪即轉向輪,后輪即行進輪共同決定。小車的前輪與后輪位置依靠已經建立好的基準坐標進行定位。首先將小車的起始位置放置在兩個障礙物中間,這樣小車出發的理論初始狀態是前輪和后輪行進方向平行,車身與兩根桿所在的直線形成一個夾角。
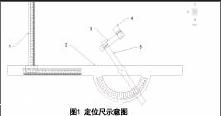
如圖1所示,定位工具由五部分組成,1是縱尺,2是主尺,3是連桿,4是前尺,5是斜尺。縱尺可以在主尺的槽內進行移動來改變位置,主尺和縱尺上面印有刻度便于準確定位,主尺和縱尺用來確定小車與所繞桿的相對位置。小車大致位置確定后接下來確定小車出發的姿態即行進輪和轉向輪的方向。斜尺和前尺分別用來記錄行進輪和轉向輪的方向。在前期調試時大致摸索出小車偏斜程度,然后用定位工具進行調試,用斜尺貼近小車的后輪,并將斜尺與前尺調成平行并固定好,通過主尺上的刻度確定斜尺的的偏斜角度,每調一次車轉動斜尺一點角度,觀察小車的軌跡的調試,最終獲得理想的軌跡線。調整好斜尺的角度就意味著后輪的偏斜位置確定。下一步是確定前輪的行進方向。前輪是轉向輪控制著小車出發后的狀態,前輪的角度變化牽一發而動全身。由于小車制作和裝配時會有一定的誤差,所以前輪和后輪的方向在所放位置不一定平行,所以需要旋轉前尺微調其偏轉角度,通過小車前輪角度的調整彌補相關誤差,使小車的行走軌跡偏差更小。前輪和后輪的方向確定后,小車的出發狀態就全部確定了。這樣在小車每次出發時就可以利用定位尺記錄好的狀態出發,行走的軌跡就會確定下來。即使小車經過拆卸重新組裝也可以利用定位尺快速確定出發狀態,大大提高了調試的效率。
5 小結
全國大學生工程訓練綜合能力競賽是以無碳小車為主題,要求所設計的小車是“以重力勢能驅動的具有方向控制功能的自行小車”。學生從無碳小車的要求來定位,通過能耗的分析、模型的設計、實體的加工、運動的調試,獲得了完成一項工程的感悟。[2]而定位工具的設計與制作也是無碳小車設計與制作的一部分,它在無碳小車運動調試過程上的應用減少了運動調試的時間,降低了小車出發狀態的不確定性,提高了小車的調試效率。
參考文獻
[1]武小梅,王星華,劉藝,等.基于實訓教學的工程素養和創新能力培養 [J].中國電力教育,2010,(30)
[2]裴鑫智. 開展大學生工程訓練綜合能力競賽的意義——以無碳小車的改進和優化為例[J]. 山西科技,2015,05:103-104+109.
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(2018年1期)2018-07-10 09:49:50
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(2015年5期)2015-12-01 04:17:19
電子設計工程(2015年3期)2015-02-27 12:04:00
