長航程無人艇的導航-制導-控制系統
2017-07-12 16:21:03白一鳴
世界海運 2017年6期
白一鳴
長航程無人艇的導航-制導-控制系統
白一鳴
長航程無人艇是進行遠距離海洋環境監測、目標探測的有效工具。高效能的導航-制導-控制系統是無人艇提升續航能力的基礎與前提。本項目圍繞長航程無人艇的導航-制導-控制系統展開介紹,重點闡述導航、制導、控制三個子系統功能的實現方法以及現有方法在節約能耗方面的不足。最后針對長航程無人艇導航-制導-控制系統的總體架構提出展望,以期達到提升無人艇的整體續航能力與平衡無人艇航行安全與能量消耗的目標。
長航程;無人艇;導航;制導;控制系統
一、長航程無人艇導航-制導-控制系統的研究意義
地球表面大約三分之二被海洋覆蓋,但大多數區域并未被完全開發利用。[1]海洋蘊藏著豐富的礦物質資源、海洋生物資源和能源,是各國經濟可持續發展的重要財富。十八大報告中明確強調“提高海洋資源開發能力,發展海洋經濟,保護海洋生態環境,堅決維護國家海洋權益,建設海洋強國”。因此,大力發展海洋裝備,提高對海洋的控制能力和開發能力,在對國民經濟的推動和國家空間安全的防護方面具有十分重要的戰略意義。
隨著氣候變化加劇,環境異常情況增多,發展新型無人艇在科學研究、商業及軍事領域的需求強烈。[2]無人艇作為無人的水面航行器正逐漸成為艦艇平臺的補充或替代品,可以較低成本完成海上大范圍、長時間的科學考察與工程任務,如海域搜救、導航和水文地理勘察,水文信息監測、海洋氣象預報,水下生物研究,海洋資源勘探以及區域海圖的繪制,近海地帶防御,特定海域的偵察、搜索、探測和排雷,反潛作戰、反特種作戰以及打擊海盜、反恐攻擊等。[3]無人水面艇在民用和軍事領域具有極其廣泛的應用前景。
近年來,面向大范圍、長期化的海洋環境監測、目標探測的背景需求,通過優化無人艇的導航-制導-控制系統以利用環境影響降低能耗,達到提升無人艇續航能力的目標是國外無人艇研究的熱點,但國內的研究仍停留在理論階段,鮮有實船研究成果。在美國海軍發布的《海軍水面無人艇主計劃》中對于這一技術領域的需求是,“進一步提高區域覆蓋率,提高對水面目標的檢測、分類和識別的能力以及跟蹤技術”。美國正在研制與調試可以超長時間持續工作的長航程反潛無人艇(AOTUV),目的是持續跟蹤靜音潛艇。英國在2014年著手研發“C-Enduro”系列長航時無人水面艇,并通過制定高效的避碰策略與路徑規劃算法,以保障無人艇有盡可能長的續航能力。[5-6]以色列在無人艇領域的發展也不容小覷。由于曾經遭受海上的恐怖襲擊,以色列對海上防御設置了重重關卡,無人艇負責在距岸20~30海里內持續巡航,進行無線電檢查和識別。[7]
因此,為應對復雜嚴酷的海洋環境,提升無人艇的續航能力,基于艇載低功耗、小規模導航設備及傳感器,研究導航信息與海洋環境信息融合技術,以實現對海洋環境的有效感知,研究自主航跡規劃、避碰與航跡跟蹤控制技術,以實現無人艇航行的自主決策與控制系統設計等關鍵技術,對優化無人艇導航-制導-控制核心系統性能,提升無人艇續航能力,具有十分重要的意義。
二、長航程無人艇導航-制導-控制系統的研究現狀
導航-制導-控制系統(Navigation-Guidance-Control System)是長航程無人艇進行自主航行的核心,直接影響無人艇的能量消耗與續航能力[8-10],其總體結構如圖1所示。
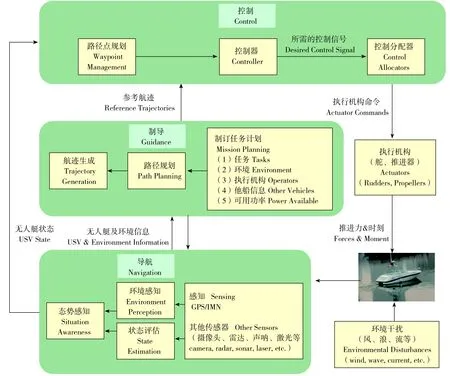
圖1 長航程無人艇導航-制導-控制系統的總體結構
導航子系統(Navigation Subsystem)的核心目標是辨識無人艇當前航行狀態(包括位置、航向、速度、加速度等),利用船載傳感器檢測環境信息(包括洋流、風速等)感知周邊環境。該系統的主要功能是進行無人艇的碰撞風險評價。
制導子系統(Guidance Subsystem)根據導航系統信息、任務需求以及環境狀態,持續生成平滑、可行的最優航行路徑,并將該參考航跡發送給控制系統。該系統的主要功能是進行無人艇的路徑規劃。
控制子系統(Control Subsystem)關注的重點是與導航、引航子系統配合在恰當的時間點生成合適的控制量,以達到期望的控制效果。該系統的主要功能是進行無人艇的操縱運動控制與決策。
導航、制導、控制三個子系統之間相互作用,單一子系統的不完善,將直接影響長航程無人艇的整體能耗效率。[11]如何架構一個科學、合理的系統模型,并充分體現出“導航-引航-控制”子系統間的共生關系一直是長航程無人艇的研究重點和難點。
1.導航:碰撞風險評估
長航程無人艇在進行遠距離航行時,需要在不同天氣和海況下執行多種任務。準確的碰撞風險評價不僅能夠確保無人艇長距離航行中的安全,也是無人艇后續進行高效率航行、提升續航能力的前提與基礎。根據研究側重點不同,一般將無人艇的碰撞風險評估分為宏觀和微觀評估兩類。
宏觀碰撞風險評估的主要思路是以歷史事故的相關數據、交通流數據以及水文氣象數據等為基礎,并采用專家問卷調查等方式獲取定性知識,對一個較大范圍水域的通航安全形勢進行整體評價。這方面的研究根據歷史事故數據來預測未來交通事故的發展趨勢,分析碰撞事故的發生時間、地點、事故原因等基本規律。[12-13]目前,客觀數據的不充足是面臨的一個普遍問題,往往需要一些定性的數據作為補充,主客觀數據融合是目前最為常用的方法之一。然而現有的主客觀數據融合方法在事故因素的選取、變量的構造中往往帶有一定主觀性,不能完全反映事故發生的根本原因,易忽略重要因素,因此評估結果的可信度較低。另外,大多數主客觀數據融合方法沒有將來自不同領域專家的數據進行區別對待,造成標準不統一,評價結果的精度和可靠性往往無法得到保證。
微觀碰撞風險評估則主要從單船或者是多船會遇局面下的碰撞事故角度展開研究,其中最為典型的是船舶領域理論,其主要思想是通過為本船設定一個有一定尺寸的區域來量化本船與周圍船舶的碰撞風險。近年來,領域模型一直是船舶安全領域的研究熱點。20世紀80年代的Fujii的主觀模型[14]和Goodwin的客觀模型[15]都采用圓形或橢圓為基礎模型,大大地簡化了船舶領域模型的設計。到2000年Smierzchalski對領域模型進行了優化,提出了多邊形模型。[16]再到2006年Pietrzykowski從船舶航行的實時性出發提出了動態領域模型。[17-18]圖2為幾種典型的船舶領域模型的演變。整體上講,船舶領域模型屬于一種事后風險評價。上述幾種典型的船舶領域模型都是以本船運動態勢為中心,分別提出了安全領域的劃分原則,但仍然存在一系列的問題需要解決:(1)由于信息占用的局限和不充分,僅為一種大體的估計,精確度較差。(2)沒有考慮到無人艇航行中環境因素的變化等不確定性信息的影響。(3)沒有考慮到無人艇航行中的能量消耗限制。
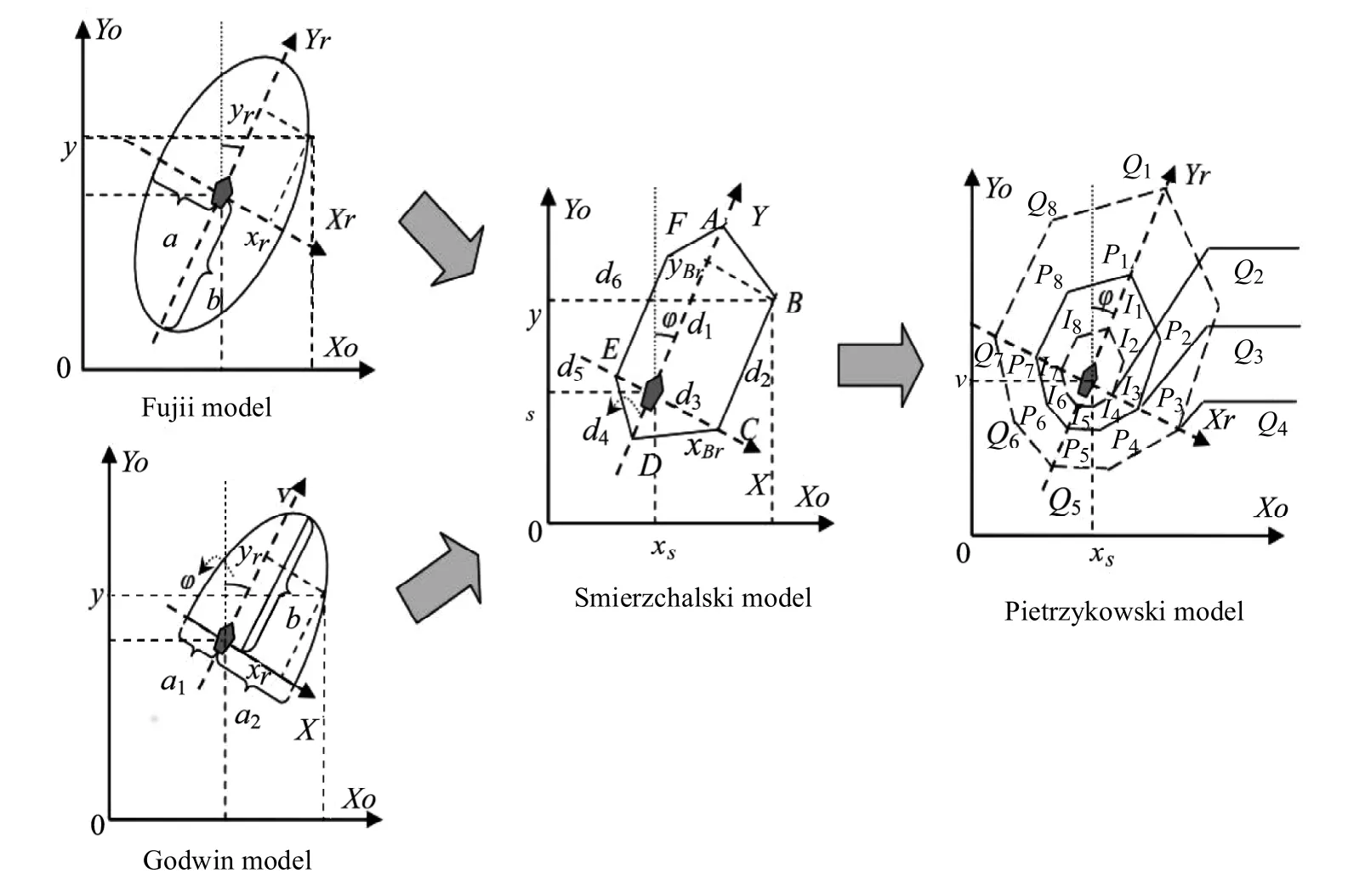
圖2 幾種典型的船舶領域模型的演變
2. 制導:路徑規劃
長航程無人艇規劃從初始點到期望目標點的航行路線時,為提升無人艇的續航能力,需要對航行安全與能量消耗進行綜合優化。而目前較為成熟的無人艇路徑規劃算法大多為處理障礙信息為目的的避障問題。
遺傳算法[19-20]是目前無人艇進行路徑規劃最為常用的方法之一。在采用遺傳算法進行航線規劃之前,通常需要將問題進行簡化,即假設每條船舶的起點和終點、速度、航向都已知,用一系列的轉向點來表示規劃的航線,將問題轉化為為每條船舶尋找一條最優的航線,當所有的船舶按照規劃的航線航行時,碰撞事故可以被成功避免。其中,在染色體生成中,通常是采用隨機的方式產生轉向點。
蟻群算法[21-22]和粒子群優化算法[23-24]是另外兩種廣泛應用于智能路徑規劃的隨機優化方法。其計算量一般會隨著解空間維度的增加呈指數增長的趨勢,而當涉及的船舶數量過多時,則會增加計算量,甚至會導致無法在較短的時間內尋找到最優的路徑。因此,目前該類研究的一個最重要的目標是提升搜尋效率,保證在規定的時間內收斂到令人滿意的結果。
遺傳算法、蟻群算法和粒子群優化算法等啟發式算法的主要問題是一致性問題,即由于算法中存在很多隨機變量,往往會導致在相同條件下的多次運算結果之間會存在差別。因此需要利用統計的方式對所得結果的局部擾動情況進行分析,以進一步驗證算法的可靠性。
在實際應用中,長航程無人艇的路徑規劃問題需要以能耗和效率為主要考量,避障問題可以認為是路徑規劃問題的一部分。從提高路徑規劃效率角度出發,目前無人艇在進行路徑規劃過程中,海洋環境中洋流影響往往沒有被充分考慮,甚至會被忽略。這會帶來巨大的能量浪費。當洋流的影響特別強烈時,無人艇的執行機構不能獨立達成控制效果,也會帶來潛在的碰撞危險。[25]因此,長航程無人艇進行高效能路徑規劃所面臨的挑戰是如何發展精確有效的路徑規劃算法,智能地運用有益的洋流作用,消除有害的洋流影響,以達到提升無人艇續航能力與節約能耗的目標。[26]
3.控制:操縱運動控制與決策
長航時無人艇進行操縱運動控制與決策的主要任務是保證無人艇在按照最優或次優的規劃路線航行過程中,既能夠成功避免與周圍動態和靜態目標的碰撞(安全性),又能夠使無人艇的轉向和變速的次數盡可能少(經濟性)。目前無人艇進行操縱運動控制與決策的實現方法,大多采用基于機器學習的智能算法,實際應用中以模糊邏輯算法[27-29]與支持向量機算法[30-32]最為典型。
模糊邏輯算法是較為經典的方法之一,其基本思想是將無人艇的航行參數與船舶駕駛員的實際經驗相結合,構建一系列模糊規則,形成模糊規則庫。并根據實際會遇情況調用規則庫中的某些相似的規則,最后利用證據理論等方法對這些規則進行合成,得到最終的決策結果。模糊邏輯方法作為一種確定性的避碰決策方法,可以克服啟發式算法不確定的缺點。但是這種方法需要依賴專家的主觀知識,往往達不到最優控制效果,甚至會降低無人艇的工作效率。
基于回歸型支持向量機的系統辨識技術已成功應用于無人艇的操縱運動建模與評價分析。支持向量機算法是一個凸二次規劃問題,能保證解的全局最優性。另外,通過引入核函數避免了算法維數災難問題,學習機的效率只同樣本數目相關而同維數無關。盡管支持向量機對環境的變化具有較強的自適應能力,但是該技術還無法實現對不確定性、隨機性信息的處理,因而不能充分地利用特征信息,識別的精度必然會受到影響。另外,從系統建模的角度而言,支持向量機采用的是典型的黑箱(Black Box)型學習模式,其獲得的輸入/輸出關系無法以易于被人們接受的形式表示出來。而在實際的無人艇避碰操縱運動過程中,需要按照避碰規則的相關規定來進行避讓操作。而且有研究顯示,56%的碰撞事故是由違反海上避碰規則造成的。因此,在避碰決策中考慮避碰規則的要求就顯得十分重要。但是由于支持向量機算法在本質上是一種黑箱算法,無法將避碰規則有效地納入避碰控制與決策過程中。因此,不可避免地產生違反避碰規則的情況。
在無人艇操縱運動控制與決策方面,大部分研究還停留在理論階段,運用后推法(Backstepping Control)、動態面(Dynamic Surface Control)等先進控制算法設計控制器以達到精確的航跡跟蹤控制效果,并運用Matlab仿真驗證其有效性。目前的技術離無人艇自動航行還有很大的差距,在基于碰撞風險與操縱性能進行自主控制與決策方面仍然面臨很大的挑戰。如何以避碰規則與控制精度作為約束條件,盡量減少執行機構的頻繁操作,以達到節約能耗的目標仍是長航程無人艇所面臨的難點問題之一。
三、無人艇導航-制導-控制系統的展望
導航、制導、控制三個子系統各自具有獨立的功能,分別能實現無人艇的碰撞風險評估、路徑規劃以及操縱運動控制與決策。在進行長航程無人艇導航-制導-控制系統的總體架構時,為提升無人艇的整體續航能力,需綜合考慮長航程無人艇的自主避碰、路徑規劃與運動控制中的能量消耗,達到平衡無人艇航行安全與能量消耗的目標。[33]航行安全與能量消耗本是水上交通工程中兩個共生的核心問題,而傳統方法論并未將其有效融合,極大制約了無人艇在復雜海洋環境下執行遠距離任務的能力。[34]
因此,長航程無人艇導航-制導-控制系統的發展應側重如下三個方面:
①利用多傳感器信息融合架構船舶動態領域模型,進行無人艇碰撞風險評估;②基于數據挖掘算法預報洋流變化,進行無人艇高效能路徑規劃;③以可達集的概念為核心,引入避碰規則作為約束條件,增加無人艇控制與決策的彈性區間。并從能量消耗的角度出發,整合三方面的研究成果。進而完成導航-制導-控制系統的綜合優化設計,達到提升長航程無人艇的續航能力與節約能耗的目標。
[1]YUH J,MARANI G,BLIDBERG D R.Applications of marine robotic vehicles[J].Intelligent Service Robotics,2011,4(4):221-231.
[2]MANLEY J E.Unmanned surface vehicles,15 years of development[R].Oceans.2008:1-4.
[3]BERTRAM V.Unmanned surface vehicles-A survey[J]. Skibsteknisk Selskab,2008:1-4.
[4]LIU Z,ZHANG Y,YU X,et al.Unmanned surface vehicles:An overview of developments and challenges[J].Annual Reviews in Control,2016,41:71-93.
[5]NIU H,LU Y,SAVVARIS A,et al.Efficient path planning algorithms for unmanned surface vehicle[J].IFAC-Papers OnLine, 2016,49(23):121-126.
[6]SAVVARIS A,TSOURDOS A.Development of collision avoidance algorithms for the C-Enduro USV[J].IFAC Proceedings Volumes, 2014,47(3):12174-12181.
[7]宋利飛.水面無人艇路徑規劃及自主避障方法研究[D].武漢:武漢理工大學,2015.
[8]FOSSEN T I.Guidance and control of ocean vehicles[M].1994.
[9]FOSSEN T I.Marine Control Systems:Guidance,Navigation, and Control of Ships,Rigs and Underwater Vehicles[M]//Marine Control System,Guidance,Navigation and Control of Ships,Rigs and Underwater.2002.
[10]FOSSEN T I.Handbook of Marine Craft Hydrodynamics and Motion Control[M].2011.
[11]CAMPBELL S,NAEEM W,IRWIN G W.A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J].Annual Reviews in Control, 2012,36(2):267-283.
[12]MENNISE,PIATIS A,NIKITAKOS N.Applying stochastic models in maritime safety[J].Journal of Environmental Protection and Ecology,2009,10(4):975-985.
[13]ARBENM,ULF P.A grounded theory model for analysis of marine accidents[J].Accident Analysis and Prevention,2011,43: 1590-1603.
[14]FUJII Y,TANAKA K.Traffic capacity[J].Journal of Navigation, 1971,24(4):543-552.
[15]GOODWIN E M.A statistical study of ship domains[J].Journal of Navigation,1975,28(3):1328-344.
[16]SMIERZCHALSKI R,MICHALEWICZ Z.Modeling of ship trajectory in collision situations by an evolutionary algorithm[J].IEEE Transactions on Evolutionary Computation,2000,4(3):227-241.
[17]PIETRZYKOWSKI Z,URIASZ J.Ship domain in navigational situation assessment in an open sea area[C].Proceeding of the 5th International Conference on Computer and IT Applications in the Maritime Industries.2006.
[18]PIETRZYKOWSKI Z,URIASZ J.The ship domain-A criterion of navigational safety assessment in an open sea area[J].Journal of Navigation,2009,62(1):93-108.
[19]SZLAPCZYNSKI R,SZLAPCZYNSKA J.On evolutionary computing in multi-ship trajectory planning[J].Applied Intelligence, 2012,37(2):155-174.
[20]TSOU M,KAO S,SU C.Decision support from genetic algorithms for ship collision avoidance route planning and alerts[J].Journal of Navigation,2010,63(1):167-182.
[21]TSOUM, HSUEH C.The study of ship collision avoidance route planning by ant colony algorithm[J].Journal of Marine Science and Technology,2010,18(5):746-756.
[22]LIU L, DAI Y, WANT L,et al.Research on global path planning of underwater vehicle based on ant colony algorithm[J].Journal of System Simulation,2007,18:019.
[23]王得燕,劉以安.粒子群算法在多船避碰決策中的應用[J].計算機工程與設計,2009(14):3380-3382.
[24]田雨波,潘朋朋.免疫粒子群算法在船舶避碰上的應用研究[J].中國航海,2011(1):48-52.
[25]SUBRAMANI D N,LERMUSIAUX P F J.Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization [J].Ocean Modelling,2016,100:57-77.
[26]LIU Y,BUCKNALL R.Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Ocean Engineering,2015,97:126-144.
[27]PERERA L,CARVALHO J,SOARES C.Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions[J].Journal of Marine Science and Technology,2011,16(1):84-99.
[28]LEE S,KWON K,JOH J.A fuzzy logic for autonomous navigation of marine vehicles satisfying COLREG guidelines[J].International Journal of Control Automation and Systems,2004,2:171-181.
[29]KAO S,LEE K,CHANG K,et al.A fuzzy logic method for collision avoidance in vessel traffic service[J].Journal of Navigation,2007, 60(1):17-31.
[30]羅偉林. 基于支持向量機方法的船舶操縱運動建模研究[D].上海:上海交通大學,2009.
[31]WANG X G,ZHOU Z J,YU L,et al.System identification modeling of ship manoeuvring motion in 4 degrees of freedom based on support vector machines[J].China Ocean Engineering, 2015,29(4):519-534.
[32]ABE S.Fuzzy support vector machines for multilabel classification[J].Pattern Recognition,2015,48(6):2110-2117.
[33]LEE T, KIM H, CHUNG H,et al.Energy efficient path planning for a marine surface vehicle considering heading angle[J].Ocean Engineering,2015,107:118-131.
[34]LIU Y,BUCKNALL R.The angle guidance path planning algorithms for unmanned surface vehicle formations by using the fast marching method[J].Applied Ocean Research,2016,59:327-344.
10.16176/j.cnki.21-1284.2017.06.004
白一鳴(1983—),男,大連海事大學信息科學技術學院,實驗師,博士。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
公民與法治(2020年11期)2020-07-25 02:02:06
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國船檢(2017年3期)2017-05-18 11:33:09
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41