智能小車的設計及應用分析
2017-07-07 13:19:37文代曉麗
互聯網天地 2017年4期
□ 文代曉麗
智能小車的設計及應用分析
□ 文代曉麗
1. 引言
隨著計算機技術、自動化技術的快速發展,智能小車在日常生活和工業生產中扮演越來越重要的角色,已經成為移動機器人研究的重要方向。目前有很多關于智能車的研究,在日常生活、科學研究、復雜環境勘探等方面應用廣泛[1]。目前,智能小車是一個集環境信息采集、處理、傳輸、決策等功能于一體的綜合系統。隨著Wi-Fi接入技術的普及以及對視頻信息采集的需求,基于Wi-Fi進行實時視頻傳輸的智能小車已成為一種趨勢。

圖1 系統功能示意圖
2. 系統整體設計
本系統包括兩大部分:遠程控制中心和智能小車,如圖1所示。遠程控制中心為手機應用程序或PC機上位機軟件。用戶通過安裝有上位機軟件的終端設備與無線路由器進行連接,觀測設備環境情況。用戶將控制指令發送給智能小車,智能小車中的微控制器對指令進行分析處理,控制小車的前進方向或反饋信息。圖2為系統方案框圖,智能小車包括電源模塊、視頻流采集模塊、通信模塊、電機驅動控制模塊[2]。
2.1智能小車硬件電路設計
智能小車采用了4WD(四輪驅動)來幫助汽車克服在泥濘和雪地上的打滑,具備更好的輪胎牽引力與轉向力的有效發揮。系統中由Wi-Fi來進行上下行之間的數據傳輸,通信協議采用TCP/ IP[3]。USB攝像頭直接將采集到的視頻流傳輸到路由器上。智能小車所需要的硬件設計主要包括單片機、無線路由、驅動電路和電源模塊。
2.2智能小車軟件程序設計與遠程控制
智能小車中的單片機主要處理來自無線路由器的指令,判斷指令類型后,通過控制PWM占空比和差速控制來實現控制的目的[4]。智能小車的遠程控制由上位機軟件完成,可以是PC機,也可以是Android平臺下手機終端。上位機軟件主要完成的是對智能小車發送指令和接收無線路由器傳輸回來的視頻流。同時電腦端的上位機還可以完成對傳輸的視頻流進行錄制等一系列處理。上位機軟件操作流程圖如圖3所示。

圖2 智能小車方案框圖
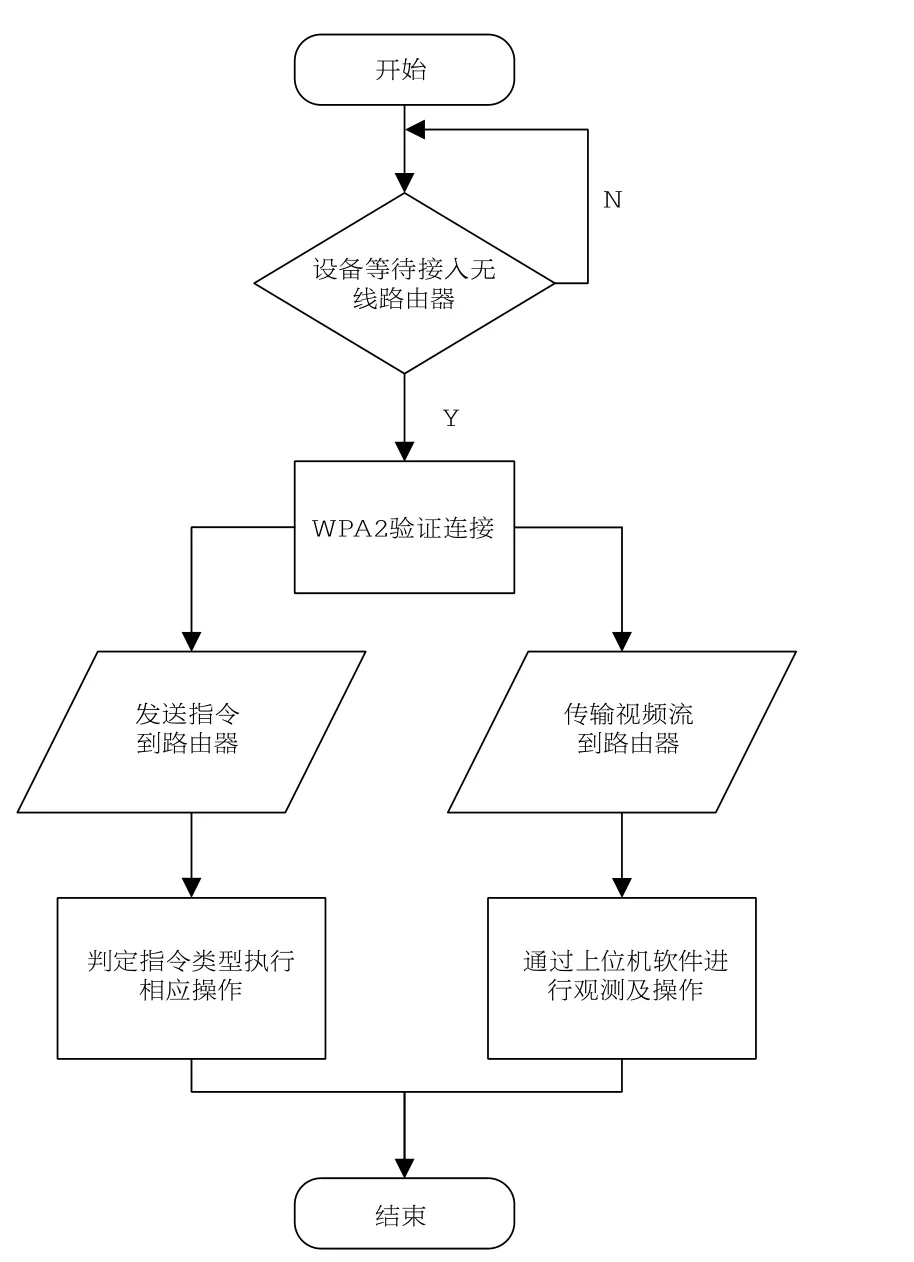
圖3 上位機軟件操作流程圖
3. 應用分析
操作系統不同,相應的控制界面也不同。PC端可以對所觀測到的視頻流進行存儲、拍照等一系列操作,Android平臺下手機終端可以更改為通過手機自帶的水平陀螺儀實現重力控制的目的。PC終端用戶通過將PC機接入無線局域網之后,打開操作界面,選擇Wi-Fi連接方式,開啟視頻,即可對前端設備進行操作及實時觀測當前環境。操作界面如圖4所示。Android平臺下手機終端用戶操作流程和PC終端類似,將手機接入無線局域網之后,即可對前端設備進行操作,操作界面如圖5所示[5]。操作時,如需切換成重力感應,只需勾選重力感應,便能切換為重力操作,提高用戶的使用體驗。
智能小車在實際工程中有著廣泛的應用前景,其中包括:
(1)有毒環境的探測。由于可以實現遠程控制,在智能小車上可以加裝攝像設備,同時還可以加裝氣體監測設備,通過實時數據采集回傳給上位機,分析后對環境情況進行判定。
(2)高溫高壓環境的設備工作狀態監控。高溫高壓環境常常無法進行對環境或者設備進行直接的接觸式測量,如果智能小車選用適用于特殊環境下的材料和監測探頭,那么利用智能小車可以實現對高溫高壓環境下各種設備工作狀態的遠程監控。
(3)空間尺寸約束條件下設備狀態監測。在很多設備尤其是設備連接鏈路中,設備布放的空間有時會極為有限,通過改裝智能小車的尺寸,可以使智能小車在狹小空間中實現監測,從而解決由于空間限制無法進行直接監測的環境場合。
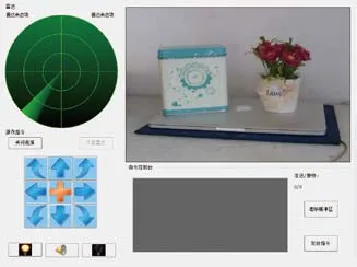
圖4 PC終端用戶操作界面

圖5 手機終端用戶操作界面
(4)連續動態多方位的實時監測。在規模較大的設備運轉環境中,加裝固定監測設備將會帶來成本上的巨大消耗,同時對監控設備的維護也是一件困難的事情。利用智能小車加裝監控設備,完全可以實現在某一空間場合內進行動態連續的多角度實時監控。
除了上述應用外,智能小車隨著現代科技進步發展,在尺寸、精度、承載能力和數據傳輸上,會有更大的提高,同時也會在工程上獲得更為廣泛應用。
4. 總結
四輪驅動小車由于其適應性強、靈活性高等特點,被廣泛地用于人力不方便的先行探測等方面。隨著當前網絡技術和智能家居技術的飛速發展,四輪驅動小車的遠程觀測成為新的研究重點。本文以四輪驅動小車為研究對象,結合Wi-Fi無線網絡,設計了相應的硬件平臺,構建了一個遠程控制智能小車系統。本系統提供人性化的控制界面,保證了其普及程度和低成本,增加了使用范圍。筆記本、手機等手持終端設備可以大大提高用戶使用的快捷性,在工程上具有廣泛的應用價值。■
(作者系北京信通傳媒有限責任公司JCIN編輯部主任,目前主要研究方向為通信與信息網絡。)
[1]馮華山.基于Internet的遠程控制機器人系統[D].西安:西北工業大學,2004.
[2]李旭東,廖中,浩孟嬌.基于CMOS攝像頭的智能車控制系統設計及實現[J].吉林大學學報(信息科學版),2013(4):414-418.
[3]朱陽,王偉成,王民慧. WiFi技術在智能車數據通信中的應用[J].傳感器世界, 2014(7):35-39.
[4]KASZUBIAK J,TORNOW M,KUHN R W,et al.Real-Time Vehicle and Lane Detection with Embedded Hardware[C]. Proceedings of the IEEE Intelligent Vehicles Symposium . 2005:619-624.
[5]王林, 段廷瑞, 顧士豪.基于Android的嵌入式視頻智能車的軟件設計[J].河南工程學院學報(自然科學版), 2014(4):55-58.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
