ADS-B信息的球狀模型飛行沖突探測算法*
2017-06-09 08:53:29楊霄鵬田士佳蘇子萱
傳感器與微系統(tǒng) 2017年6期
劉 鑫, 楊霄鵬, 田士佳, 蘇子萱
(空軍工程大學 信息與導航學院,陜西 西安 710077)
ADS-B信息的球狀模型飛行沖突探測算法*
劉 鑫, 楊霄鵬, 田士佳, 蘇子萱
(空軍工程大學 信息與導航學院,陜西 西安 710077)
隨著空中飛行流量日趨增大,飛行器自由飛行過程中發(fā)生碰撞的可能性也越來越大,針對飛行器周圍空域進行合理劃分,給出了一種基于ADS-B信息的球狀模型飛行沖突探測算法。該算法結合ADS-B的原理和特點,運用球狀模型取代圓柱體模型對飛行器周圍空域進行建模,然后進行沖突目標初選,對可能發(fā)生沖突飛行器的位置、航跡交叉點、距離進行計算并預估到達時間,與門限值比較判斷能否發(fā)生碰撞,最后,對算法進行仿真。結果驗證:算法能夠更準確并且快速地完成沖突探測,并對駕駛員發(fā)出沖突告警,對防止飛行沖突的發(fā)生具有積極作用。
自由飛行; ADS-B; 沖突探測; 沖突告警
0 引 言
隨著國內(nèi)外民航運輸業(yè)的飛速發(fā)展,飛行流量也隨之不斷增長,致使整個空域系統(tǒng)的擁擠和超負荷情況日益嚴重,飛行器之間由于高度、速度以及航跡和航向導致發(fā)生沖突的概率大大增加。現(xiàn)階段廣泛使用的交通警戒與防撞系統(tǒng)(traffic alert and collision avoidance system,TCAS)漸漸無法滿足飛行器的防沖突告警需求,其在實際應用過程中暴露出錯誤告警和非必要性告警等問題,而且沖突探測和告警能力隨著航空線路復雜性的增大而不斷降低[1,2],干擾飛行員實際操作和專注度的同時,還會產(chǎn)生過大的飛行間隔,導致空域系統(tǒng)的管理混亂。
在此背景下,基于衛(wèi)星導航的廣播式自動相關監(jiān)視(automatic dependent surveillance-broadcast,ADS-B)因其精度更高的方位信息和更新速度更快的數(shù)據(jù)特點能更有效、更即時、更準確地進行沖突探測,目前,多數(shù)沖突探測算法以圓柱體為模型,存在計算量大、虛警和漏警概率高、區(qū)域劃分不準確等問題[3]。因此,采用球狀模型,且在假定所有探測沖突的飛機都攜帶有ADS-B系統(tǒng)的情況下,根據(jù)沖突探測飛機相對位置、速度和飛行狀態(tài),給出了一種基于ADS-B信息的確定型飛機探測沖突算法,為飛行員提供更加充足和穩(wěn)定的應急告警時間,提高空域系統(tǒng)的利用效率。
1 ADS-B概述
ADS-B是一種基于衛(wèi)星定位并且利用空—地、空—空數(shù)據(jù)鏈通信完成交通監(jiān)視和信息傳遞的空管監(jiān)視新技術[4~9]。ADS-B系統(tǒng)機載裝置通過GPS進行實時定位后,以2次/s的速率將飛機的飛行位置信息、速度、航向、高度等數(shù)據(jù)信息向外廣播,其周圍的飛機和地面基站都能夠接收到這些實時數(shù)據(jù)。同時,本機也能收到其他飛機發(fā)出的相關數(shù)據(jù)。這樣,飛機與基站、飛機與飛機之間通過高速數(shù)據(jù)鏈進行空地一體化的協(xié)同監(jiān)視,實現(xiàn)“自由飛行”。
ADS-B運用了相關合作式的監(jiān)視技術,具有更強的監(jiān)視能力、精度誤差更小、數(shù)據(jù)更新率快,系統(tǒng)功能更全面等優(yōu)勢,其良好的通信功能和監(jiān)視手段能準確、及時、連續(xù)地掌握飛機動態(tài),有效實施管制,提高了空域資源的利用率[10,11]。
2 飛行器周圍區(qū)域劃分
對飛行器周圍監(jiān)視區(qū)域劃分的基礎條件為,飛行器在空域中自由飛行,同時為了防止飛行器之間相互碰撞[12],綜合考慮飛行器的安全和沖突探測算法可行性,可將每一架飛行器周圍的區(qū)域劃分為保護區(qū)域(PAZ)和碰撞區(qū)域(CAZ),其中PAZ和CAZ均以飛行器質心作為球心的虛擬球體,如圖1所示,較大球體和較小球體分別為PAZ和CAZ。本文將裝備有ADS-B系統(tǒng)進行沖突探測的飛行器稱為本機,同時將在本機周圍一定區(qū)域內(nèi)自由飛行的飛行器稱為目標機。文中將飛行器之間的即將發(fā)生的飛行沖突稱為飛行矛盾[13],即航空器在自由飛行過程中飛行間隔小于預設的門限間隔。
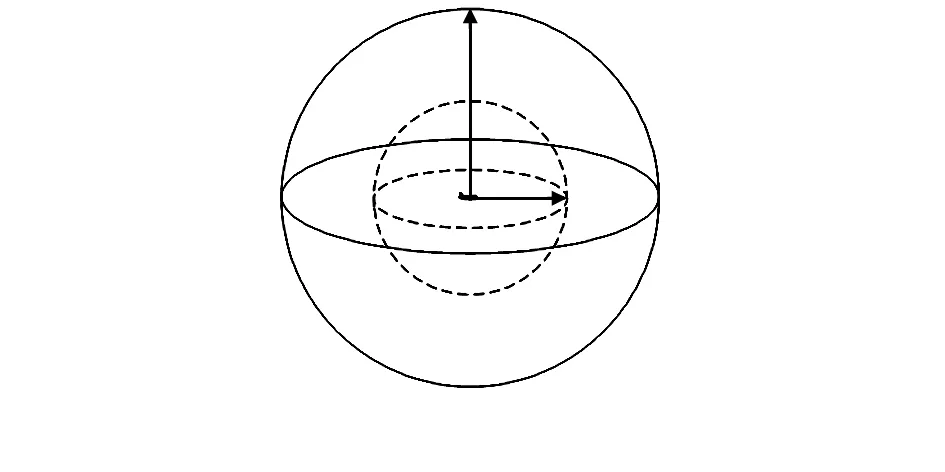
圖1 飛行器周圍區(qū)域劃分
PAZ的設置范圍大于CAZ,是為了在沖突探測過程中提醒飛行器駕駛員在其周圍有飛行器存在進入其CAZ的可能性,給駕駛員提供足夠的時間進行沖突預判并且及時采取規(guī)避措施。PAZ的范圍是根據(jù)本機和目標機的速度、高度、航跡和航向等信息,在CAZ范圍的基礎上設定的,即
RPAZ(t)=RCAZ+max(0,V(t))T
(1)
式中RPAZ和RCAZ分別為t時刻本機PAZ區(qū)域球體和CAZ區(qū)域球體的半徑;V(t)為t時刻本機與目標機的相對速度;T為本機PAZ區(qū)域的預留時間,取T=10 s。
設置CAZ是為了防止飛行器之間實際意義上碰撞的發(fā)生,如果目標飛機進入本機的CAZ,即可以認為兩飛行器發(fā)生了飛行碰撞。綜合考慮ADS-B所提供信息的精確度以及GNSS系統(tǒng)的準確性等因素的影響,對于ADS-B安全性能評價結果表明,可選取RCAZ=9.26 km。
3 飛行沖突探測算法
3.1 算法流程
針對飛行器在實際自由飛行過程中暴露出的問題,結合ADS-B系統(tǒng)的特點,采用確定型沖突探測算法。在探測模型建立過程中使用球狀模型取代原有圓柱體模型,只需在兩飛行器航跡交叉點相對位置連線上進行飛行探測,而不需要在水平和垂直兩個方向上進行沖突探測,大大減少了系統(tǒng)的運算量,既提高了數(shù)據(jù)處理的速度,又提高了整個系統(tǒng)的精確度和可靠性,算法流程框圖如圖2所示。
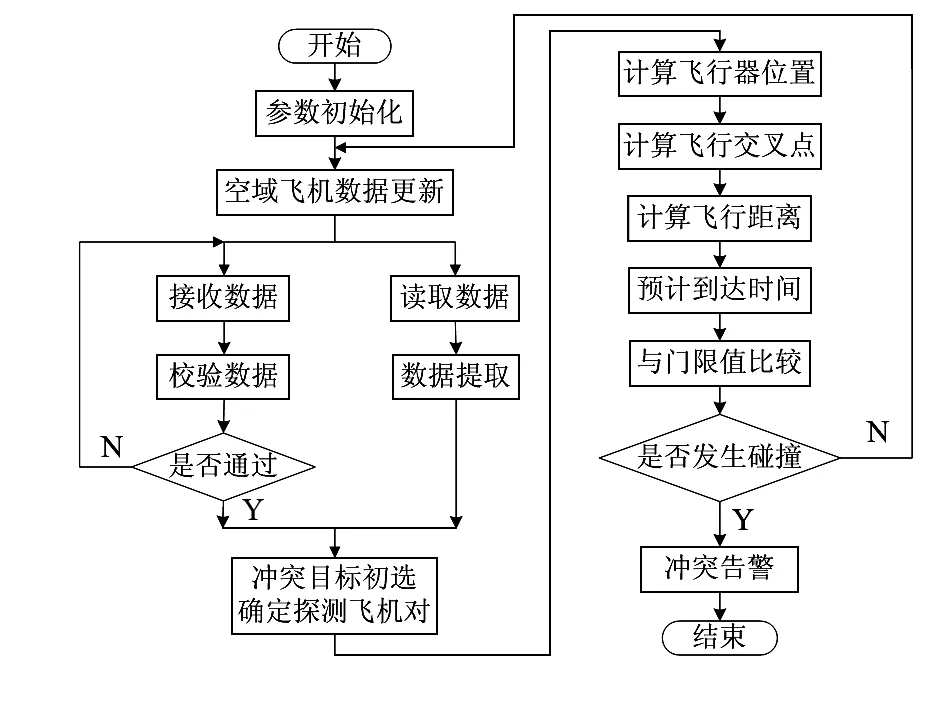
圖2 飛行沖突探測流程圖
3.2 沖突探測算法
本文提出的沖突探測算法在球狀模型的基礎上,通過計算目標機與本機航跡交叉點,根據(jù)當前位置計算得到飛行距離,預計到達交叉點的時間并與規(guī)定門限值比較,判斷能否發(fā)生碰撞,進而發(fā)出沖突告警。
1)沖突目標初選
首先,進行沖突目標初選,對本機周圍一定空域內(nèi)的飛行器進行篩選,將不可能發(fā)生碰撞的飛行器排除,在目標初選過程中對可能發(fā)生沖突的飛行器進行飛行狀態(tài)判斷[14]。處于巡航狀態(tài)的兩飛行器可能出現(xiàn)的沖突場景主要可分為交叉、追及和相向3種類型,如圖3所示。
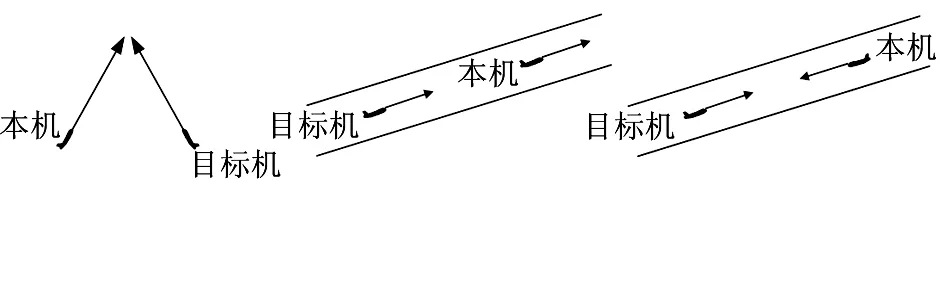
圖3 沖突場景
假設本機和目標機在平面直角坐標系的坐標分別為(x1,y1)和(x2,y2),并且在水平和豎直方向的速度可分別表示為Vx1,Vx2,Vy1,Vy2,則判斷目標機與本機是接近飛行還是遠離飛行的依據(jù)為
c=(x1-x2)(Vx1-Vx2)+(y1-y2)(Vy1-Vy2)
(2)
當c<0時,表示目標機和本機接近飛行;當c=0時,表示目標機和本機相對靜止飛行;當c>0時,表示目標機和本機遠離飛行。
確定兩飛行器的相對飛行狀態(tài)后,判斷目標飛機是否將進入本機的PAZ區(qū)域。將飛行器周圍球狀模型區(qū)域投影到平面直角坐標系,則本機的PAZ區(qū)域即XY平面上以RPAZ為半徑圓形區(qū)域,可以認為當目標飛機的航跡線與該圓形區(qū)域存在交點時有發(fā)生碰撞的可能。以本機為原點建立坐標系,兩飛行器的相對速度關系和相對運動關系如圖4所示。
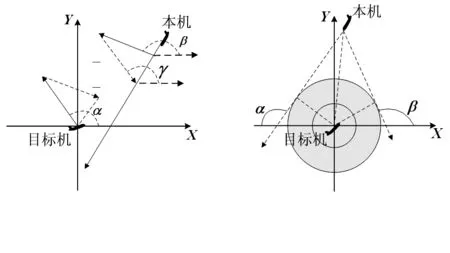
圖4 相對飛行關系
其中,V1,V2分別為本機和目標機的速度矢量;α,β分別為其與X軸正方向的夾角;Vr為本機和目標機的相對速度矢量,其與X軸正方向的夾角用r表示,則存在以下關系
Vr=(V1cosα-V2cosβ,V1sinα-V2sinβ)
(3)
(4)
根據(jù)幾何學內(nèi)容可知:當目標機航跡相切于本機PAZ的左側時,其切線與X軸正方向的夾角為α,Vr與X軸正方向的夾角為γ。如果γ小于α,則不會發(fā)生碰撞;同理,當目標機航跡相切于本機PAZ的右側時,其切線與X軸正方向的夾角為β,如果γ大于β,則不會發(fā)生碰撞。
2)飛行交叉點計算
假設本機和目標飛機航跡在球坐標系中兩點坐標分別為P11(X11,Y11),P12(X12,Y12)和P21(X21,Y21),P22(X22,Y22),航跡交叉點坐標用P(X,Y)表示,用球坐標表示為θ11,φ11,θ12,φ12,θ21,φ21,θ22,φ22和θ,φ。如圖5所示。
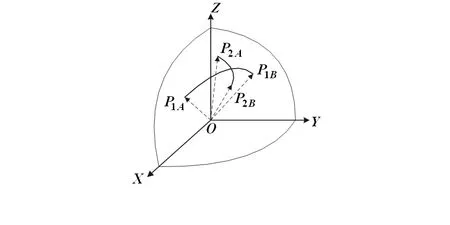
圖5 球坐標示意圖
用R表示地球半徑,則坐標原點O到P11,P12,P21,P22的矢量分別為
r11=Rsinθ11cosφ11i+Rsinθ11sinφ11j+Rcosθ11k
(5)
r12=Rsinθ12cosφ12i+Rsinθ12sinφ12j+Rcosθ12k
(6)
r21=Rsinθ21cosφ21i+Rsinθ21sinφ21j+Rcosθ21k
(7)
r22=Rsinθ22cosφ22i+Rsinθ22sinφ22j+Rcosθ22k
(8)
r=Rsinθcosφi+Rsinθsinφj+Rcosθk
(9)
根據(jù)矢量關系可得
A1Dsinθcosφ-B1sinθsinφ+C1cosθ=0
(10)
A2sinθcosφ-B2sinθsinφ+C2cosθ=0
(11)
Ai=sinθi1sinφi1cosθi2-sinθi2sinφi2cosθi1
(12)
Bi=sinθi1sinφi1cosθi2-sinθi2sinφi2cosθi1
(13)
Ci=sinθi1cosφi1sinθi2cosφi2-sinθi2cosφi2sinθi1cosφi1
(14)
式中i均取1或2,則通過以上式計算可得θ,φ,進而可以得到航跡交叉點坐標P(X,Y)。
3)飛行距離計算
假設當前位置坐標為N(Xn,Yn),則其到航跡交叉點P(X,Y)的距離為
(15)
4)到達時間計算
假設目標飛機與本機預計到達航跡交叉點的時間為td,綜合考慮飛行過程中各種因素的影響,建立飛行航跡模型
Dt=Dt-1+VΔt+vt-1+nt
(16)
式中Dt為不同飛行器t時刻所在的航跡位置;V為當前飛行速度;vt和nt分別為飛行速度測量誤差和飛行過程中引入的噪聲。
在已知兩飛行器位置和距離時,以td代替Δt帶入上式便可得到兩飛行器到達交叉點的時間,進而與門限值比較判斷能否發(fā)生碰撞,若可能發(fā)生碰撞,則發(fā)出沖突告警。
4 仿真分析
為了檢驗算法的實際可行性,根據(jù)機場附近典型的飛機ADS-B報文信息,利用Matlab對沖突探測算法進行實驗測試,進行了大量的蒙特卡羅仿真分析。假設本機周圍CAZ半徑為 ,在9.26~55.56 km范圍的圓環(huán)內(nèi)存在50架自由飛行狀態(tài)的飛機,其模擬數(shù)據(jù)的初始交通態(tài)勢如圖6所示。
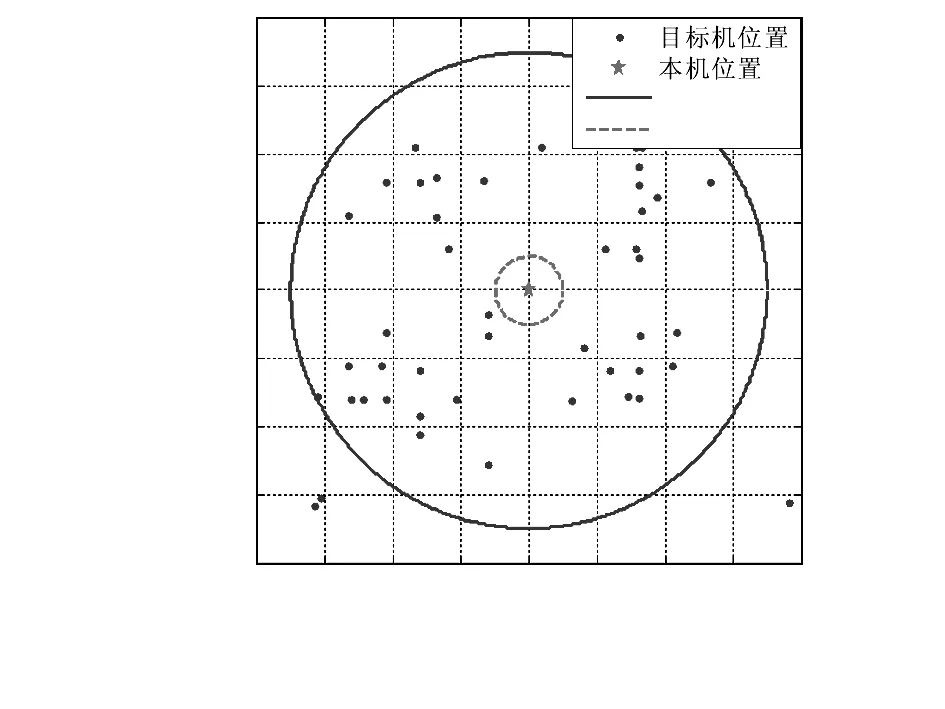
圖6 初始交通態(tài)勢
經(jīng)過對空域飛機數(shù)據(jù)的更新和處理,對沖突目標初選去除遠離本機飛行的飛機和不可能進入本機CAZ的飛機后,可能發(fā)生沖突的飛機為9架,此時的交通態(tài)勢如圖7所示。對該50架飛機相關數(shù)據(jù)做大量的蒙特卡羅實驗,結果顯示:存在沖突可能的飛機平均數(shù)量為7.156 8架,多數(shù)飛機經(jīng)過篩選和排除之后,只有極少數(shù)飛機存在發(fā)生沖突的可能,說明該沖突探測算法在沖突目標選擇方面性能優(yōu)越,對飛行安全具有積極作用。
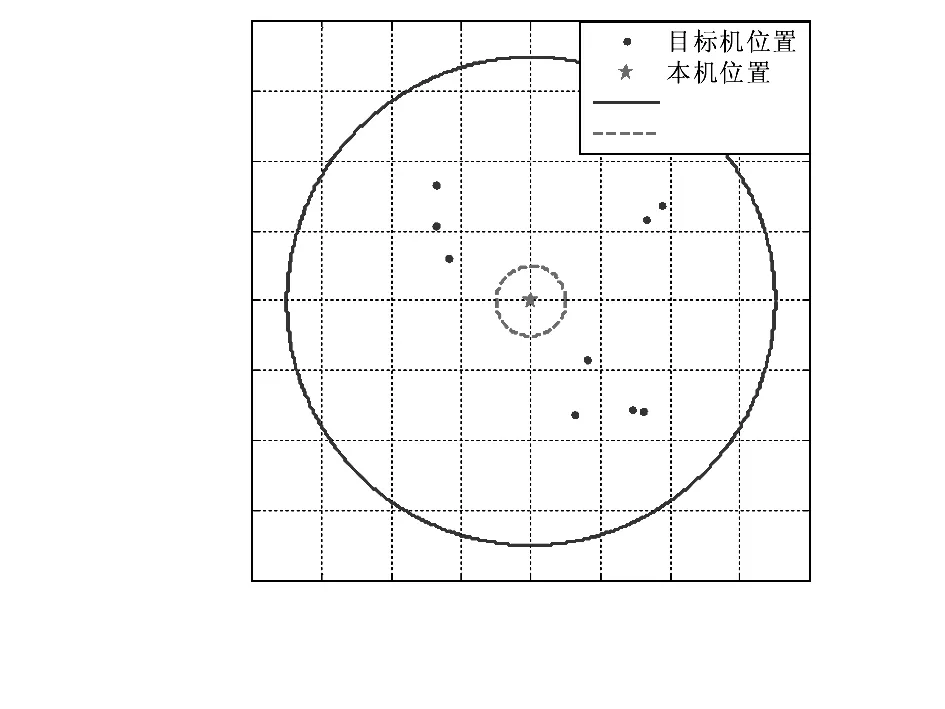
圖7 排除后的初始交通態(tài)勢
為了更準確地實現(xiàn)沖突預警,進一步對可能發(fā)成沖突的飛機進行探測,本機和目標機分別以v1=700km/h和v2=1 000km/h的速度飛行,初始位置坐標分別為(0.000 0,0.000 0)m和(1.259 8,-3.259 8)m,假設其航跡如圖8所示。
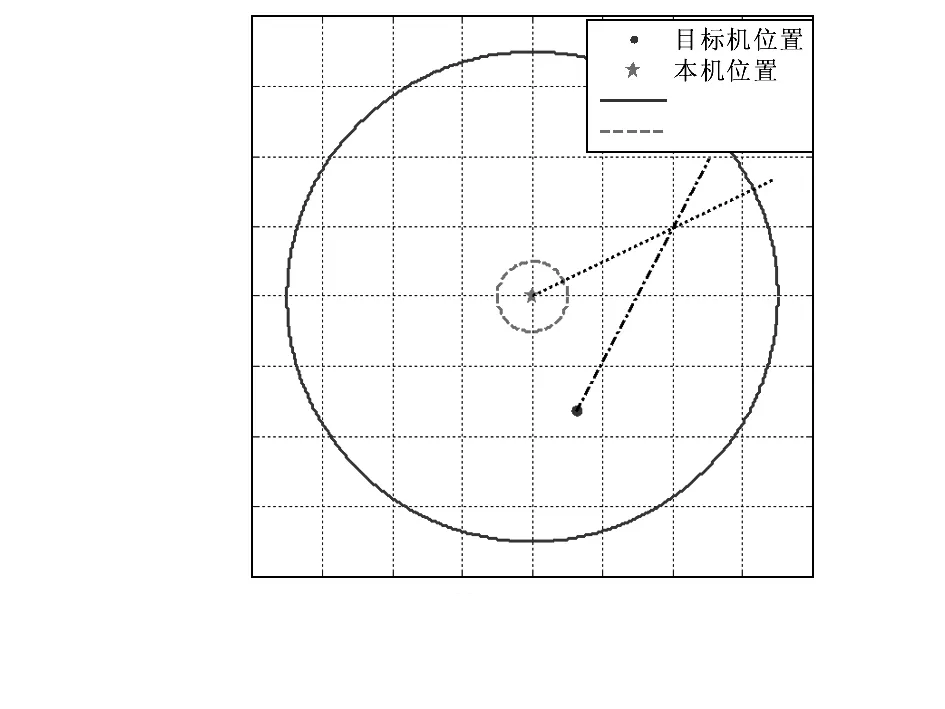
圖8 航跡圖
兩機航跡交叉點坐標為(4.000 0,2.000 0)m,計算可得本機比目標機先到達航跡交叉點,則沖突探測過程主要預測本機到達交叉點時刻的態(tài)勢。經(jīng)過計算,兩機的相對速度為vr=306.76m/s,本機PAZ半徑為RPAZ=11 114.32m,則目標機到達本機CAZ和PAZ的時間分別為tc=61.521 9s和tp=50.963 7s,故tc>1min且tp<2min。由此可見,本機會發(fā)生PAZ預警,可為駕駛員提供充足的預判和反應時間。
5 結束語
針對基于ABS-B系統(tǒng)的優(yōu)勢和特點,采用球狀模型對飛行器周圍區(qū)域進行合理劃分,通過仿真實驗和分析證明算法具有計算速度快、數(shù)據(jù)準確性高、流程合理等優(yōu)勢,具有較強的可行性。同時,在不同環(huán)境空域中影響因素不同的情況下,應該對相應的參數(shù)和計算方法進行合理的改變,可以有效地對沖突目標對之間進行探測并發(fā)出沖突告警,為擴大沖突探測區(qū)域、提高探測準確度和增強防撞性能開辟了廣闊的前景。但是,在實際應用過程中,可能發(fā)生沖突飛機的數(shù)量更多,并且空域中存在多種因素影響,所以,對于復雜情況下的沖突探測仍需進一步探討和研究。
[1]MaximeGariel,FabriceKunzi,JohnHansmanR.AnalgorithmforconflictdetectionindensetrafficusingADS-Bs[C]∥30thDigtalAvionicsSystemConference,2011.
[2] 張 軍.現(xiàn)代空中交通管理[M].北京:北京航空航天大學出版社,2005.
[3] 浦黃忠,胡 勇,王道波.無人機高精度容錯高度測量系統(tǒng)設計[J].傳感器與微系統(tǒng),2007,26(8):84-86.
[4] 沈佳峰.民機TCAS機動策略與仿真研究[D].上海:上海交通大學,2011.
[5]WhalenD,RathinamS,BaggeC.Advanceddevelopmentsinairportsurfaceandterminalareatrafficsurveillanceapplications[C]∥Proceedingsofthe22ndDigitalAvionicsSystemsConference,2003:9.B.3-9.1-9.
[6] 鄧 偉,張 軍,吳 限.一種適應于航路改變情況的沖突概率預測算法[J].北京航空航天大學學報,2005,31(12):1327-1331.
[7] 曹平軍,楊昌茂,王曉峰,等.飛行體姿態(tài)測量誤差校正方法研究[J].自動化儀表,2014(2):20-23.
[8]TangJun,FanLinjun,LaoSongyang.Collisionavoidanceformulti-UAVbasedongeometricoptimizationmodelin3Dairspace[J].ArabianJournalforScienceandEngineering,2014,39(11):8409-8416.
[9]CarboneC,CiniglioU,CorraaroF,etal.Anovel3Dgeometricalgorithmforaircraftautonomouscollisionavoidance[C]∥2006 45thIEEEConferenceonDecisionandControl,IEEE,2006:1580-1585.
[10] 胡永紅.小型無人機高度定位數(shù)據(jù)融合方法[J].傳感器與微系統(tǒng),2003,22(6):24-26.
[11]HoltJ,BiazS,AjiCA.Comparisonofunmannedaerialsystemcollisionavoidancealgorithmsinasimulationenvironment[J].JournalofGuidance,Control,andDynamics,2013,36(3):881-883.
[12] 劉慧穎,白存儒,楊廣珺.無人機自主防撞關鍵技術與應用分析[J].航空工程進展,2014,5(2):141-147.
[13] Park J W,Oh H D.Tahk M J.UAV collision avoidance based on geometric approach[C]∥SICE Annual Confererce,IEEE,2008:2122-2126.
[14] 羅 臻,劉宏立,徐 琨.無線傳感器在協(xié)同攻擊環(huán)境中的安全定位研究[J].傳感器與微系統(tǒng),2014,33(7):38-41.
Flight collision detection algorithm based on ADS-B information spherical model*
LIU Xin, YANG Xiao-peng, TIAN Shi-jia, SU Zi-xuan
(Information and Navigation College,Air Force Engineering University,Xi’an 710077,China)
With the increasing flight flow of aircraft,the probability of collision during free flying is becoming larger.A collision detection algorithm based on ADS-B spherical model is put forward via reasonably divide surrounding area of aircraft.Combine with the theory and feature of ADS-B,this method establishes spherical model instead of cylindrical model,then implement the pre-selecting of collision objects,calculate the possible collision position,track-crossing point and distance.It estimates the arriving time and compare with threshold value to detect whether a collision can happen.Simulation result shows this algorithm can realize collision detection more quickly and accurately,which can be advantageous to avoid flight collision by sending collision alert to the pilot.
free flying; ADS-B; collision detection; collision alert
2016—07—14
國家自然科學基金資助項目(61202490);航空科學基金資助項目(20150896010)
10.13873/J.1000—9787(2017)06—0126—04
V 249
A
1000—9787(2017)06—0126—04
劉 鑫(1993-),男,碩士研究生,主要研究方向為軍事航空通信,E—mail:kdyliuxin@163.com。
楊霄鵬(1973-),男,副教授,碩士生導師,主要從事寬帶無線通信及信號處理技術工作。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
