對心直動滾子從動件盤形凸輪機構精確解與近似解的比較
2017-06-01 11:35:44董冠文李宗義甘肅機電職業(yè)技術學院甘肅天水741001
鍛壓裝備與制造技術 2017年2期
董冠文,李宗義(甘肅機電職業(yè)技術學院,甘肅 天水 741001)
對心直動滾子從動件盤形凸輪機構精確解與近似解的比較
董冠文,李宗義
(甘肅機電職業(yè)技術學院,甘肅 天水 741001)
分析和比較了對心直動滾子從動件盤形凸輪機構頂桿運動方程的近似解和精確解。推導了理想狀態(tài)下對心直動滾子從動件盤形凸輪機構頂桿運動方程的精確表達式,使用Taylor級數(shù)將精確表達式展開,通過數(shù)值算例,獲得了頂桿的位移、速度和加速度表達式的精確解和分別對應的一階、二階、三階近似解。結果表明:只有當凸輪轉動中心到圓盤中心的距離與圓盤半徑加上滾子半徑之和的比值較小時,對心直動滾子從動件盤形凸輪機構近似解才接近精確解;比值較大時,近似解和精確解的差別較大。
對心直動滾子;從動件;盤形凸輪機構;Taylor級數(shù);近似解;精確解
盤形凸輪結構簡單、加工方便、應用廣泛,在凸輪機構中占有相當大的比重,因而對它的研究也更具代表性。其中對心直動滾子從動件盤形凸輪機構的使用較為常見。在該機構中,滾子與凸輪表面線接觸,接觸應力大,摩擦磨損嚴重。為了減少磨損,凸輪表面需要進行熱處理或化學處理,有時在輪廓表面上固定硬質型材或加一層耐磨材料。
本文僅考慮在理想狀態(tài)下,并忽略尺寸誤差對運動精度的影響等因素,分析比較對心直動滾子從動件盤形凸輪機構精確解與近似解。
1 頂桿的運動方程
1.1 精確表達式
以某對心直動滾子從動件盤形凸輪機構為例,如圖1所示,凸輪機構的角速度ω,轉角為φ=ωt,滾子半徑長r,偏心輪圓盤半徑R,凸輪轉動中心到偏心輪圓盤中心的距離為OC=e,偏心輪帶動頂桿AB沿鉛垂直線作往復運動,不難確定頂桿的位移為

圖1 對心直動滾子從動件盤形凸輪機構

式中:s、t——分別為頂桿位移和時間;
λ——凸輪轉動中心到圓盤中心的距離與圓盤半徑加上滾子半徑之和的比值,λ=。
將頂桿的位移方程(1)對時間t取一階導數(shù),可得到頂桿的速度方程

將頂桿的位移方程(1)對時間t取二階導數(shù),可得到頂桿的加速度方程

1.2 近似表達式
對方程式(1)中帶根號部分用Taylor級數(shù)展開如下:
如果保留一階,頂桿的位移可近似表示為

對(4)分別取一階導數(shù)和二階導數(shù),則可以得到頂桿的速度和加速度的一階近似表達式如下

如果保留二階,頂桿的位移可近似表示為

對(7)分別取一階導數(shù)和二階導數(shù),則可以得到頂桿的速度和加速度的二階近似表達式如下
如果保留三階,頂桿的位移可近似表示為
對(10)分別取一階導數(shù)和二階導數(shù),則可以得到頂桿的速度和加速度的三階近似表達式如下
2 數(shù)值算例
本文僅考慮在理想狀態(tài)下,即凸輪保持在較低均勻角速度下轉動,并忽略尺寸誤差對運動精度的影響等因素。假設凸輪機構的角速度ω=3rad/s,滾子半徑長r=10mm,圓盤半徑R=40mm,凸輪轉動中心到圓盤中心的距離為OC=e=25mm,則此時比值λ=0.5,方程(1)、(4)、(7)、(10)分別為對心直動滾子從動件盤形凸輪機構頂桿位移的精確解和對應的一階、二階、三階近似解,相應可得到頂桿的位移圖,如圖2所示,頂桿位移的一階、二階、三階近似解均接近精確解;方程(2)、(5)、(8)、(11)分別為對心直動滾子從動件盤形凸輪機構頂桿速度的精確解和對應的一階、二階、三階近似解,如圖3所示,頂桿速度的精確解和一階、二階、三階近似解存在一定誤差;方程(3)、(6)、(9)、(12)分別為對心直動滾子從動件盤形凸輪機構頂桿加速度的精確解和對應的一階、二階、三階近似解,如圖4所示,頂桿速度的精確解和一階、二階、三階近似解存在一定誤差,綜合體現(xiàn)為圖3誤差不如圖4明顯,即此時加速度的精確解與近似解的誤差比速度的精確解與近似解的誤差明顯。
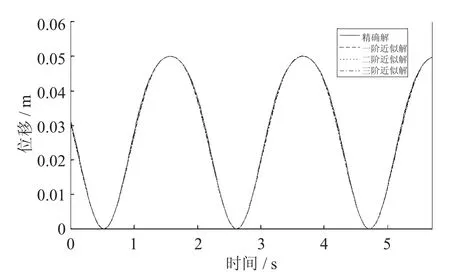
圖2 頂桿位移比較(λ=0.5)
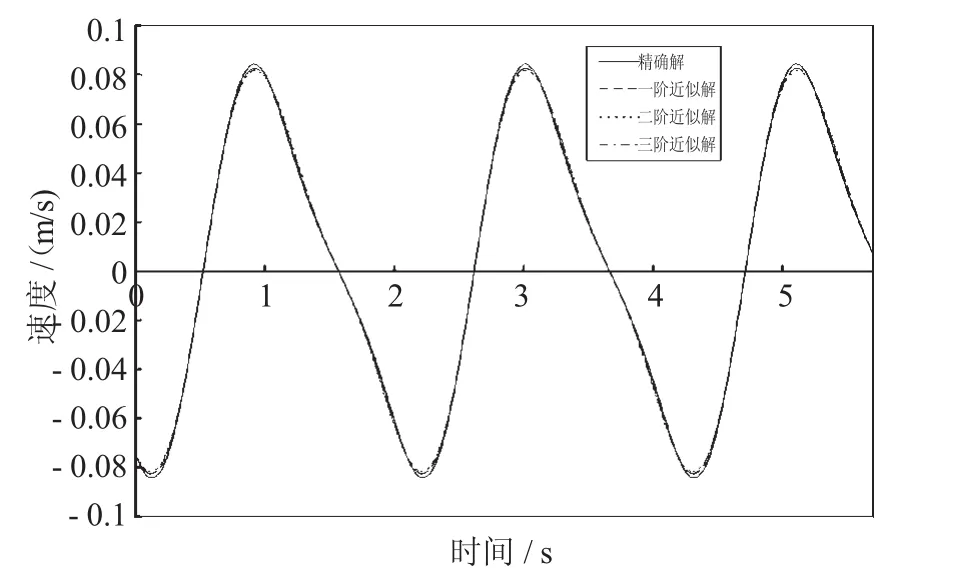
圖3 頂桿速度比較(λ=0.5)
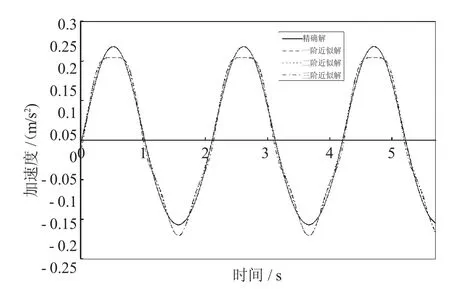
圖4 頂桿加速度比較(λ=0.5)
如果增大λ,即通過設置輪機構的角速度ω= 3rad/s,滾子半徑長r=10mm,圓盤半徑R=40mm,凸輪轉動中心到圓盤中心的距離為OC=e=40mm,則此時比值λ=0.8。方程(1)、(4)、(7)、(10)分別為對心直動滾子從動件盤形凸輪機構頂桿位移的精確解和對應的一階、二階、三階近似解,相應可得到頂桿的位移圖,如圖5所示,此時頂桿位移的精確解與保留一階、二階、三階的近似解誤差較大,但是三個近似解很接近;方程(2)、(5)、(8)、(11)分別為對心直動滾子從動件盤形凸輪機構頂桿速度的精確解和對應的一階、二階、三階近似解,如圖6所示,此時速度的精確解與保留一階、二階、三階的近似解誤差較大,同時,一階近似解和二階近似解很接近,三階近似解與精確解誤差更大,三階近似解與一階近似解和二階近似解誤差較大;方程(3)、(6)、(9)、(12)分別為對心直動滾子從動件盤形凸輪機構頂桿加速度的精確解和對應的一階、二階、三階近似解,如圖7所示,加速度的一階近似解、二階近似解與精確解誤差較大,但一階近似解、二階近似解很接近,同樣三階近似解與精確解比較接近,但與一階近似解、二階近似解誤差較大,此時,滾子從動件盤形凸輪機構頂桿位移、速度、加速度的精確解及其分別對應的一階、二階、三階近似解,誤差明顯增大。
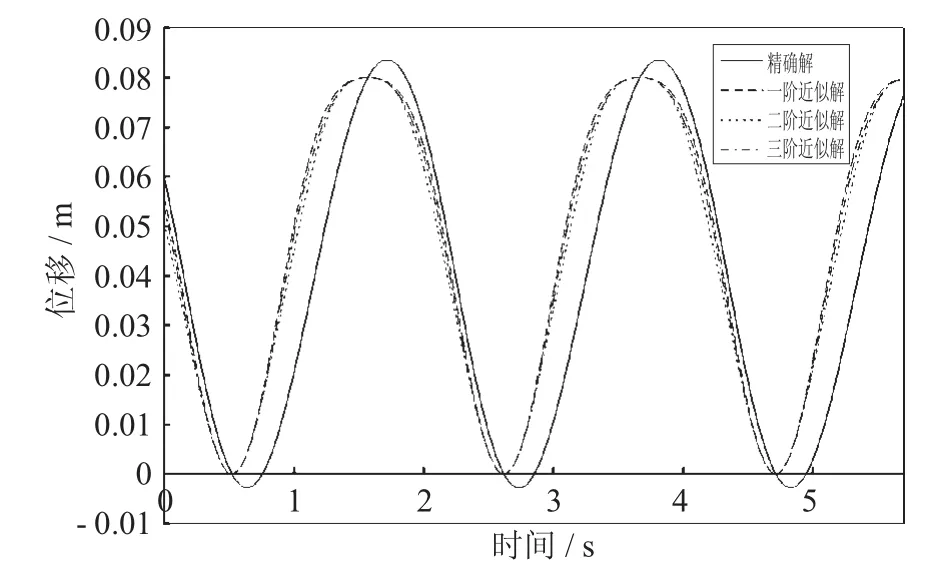
圖5 頂桿位移比較(λ=0.8)
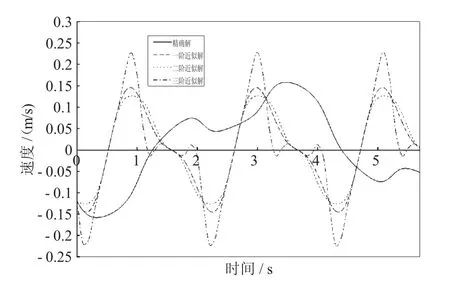
圖6 頂桿速度比較(λ=0.8)
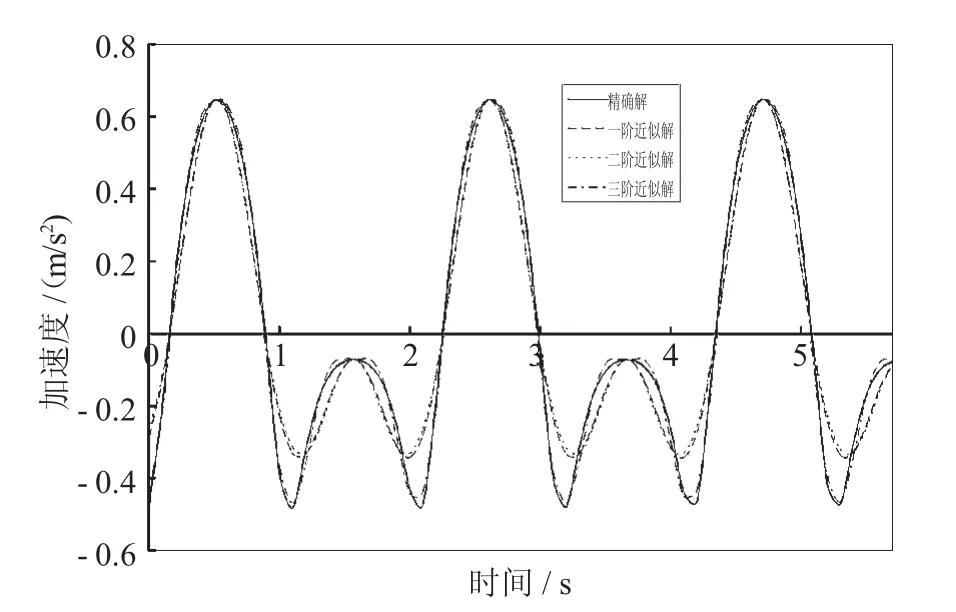
圖7 頂桿加速度比較(λ=0.8)
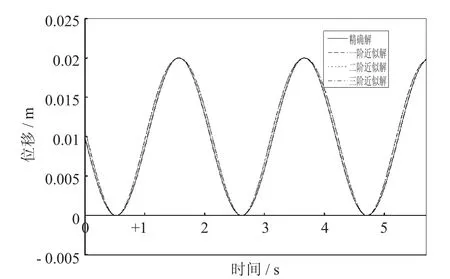
圖8 頂桿位移比較(λ=0.2)
如果減小λ,即通過設置輪機構的角速度ω= 3rad/s,滾子半徑長r=10mm,圓盤半徑R=40mm,凸輪轉動中心到圓盤中心的距離為OC=e=10mm,則此時比值λ=0.2。方程(1)、(4)、(7)、(10)分別為對心直動滾子從動件盤形凸輪機構頂桿位移的精確解和對應的一階、二階、三階近似解,相應可得到頂桿的位移圖,如圖8所示,位移的一階、二階、三階近似解均接近精確解;方程(2)、(5)、(8)、(11)分別為對心直動滾子從動件盤形凸輪機構頂桿速度的精確解和對應的一階、二階、三階近似解,如圖9所示,速度的一階、二階、三階近似解與精確解幾乎重合;方程(3)、(6)、(9)、(12)分別為對心直動滾子從動件盤形凸輪機構頂桿加速度的精確解和對應的一階、二階、三階近似解,如圖10所示,加速度的一階、二階、三階近似解與精確解幾乎重合。
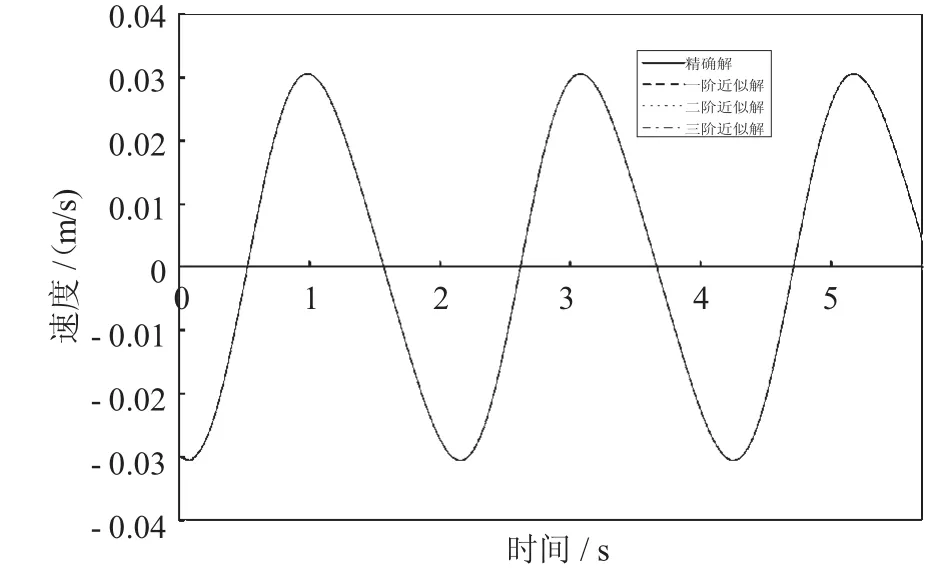
圖9 頂桿速度比較(λ=0.2)
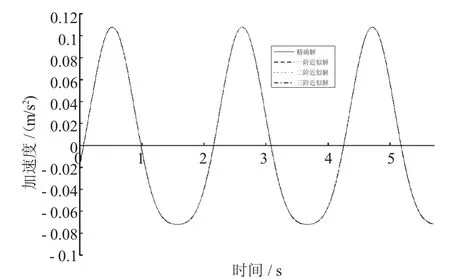
圖10 頂桿加速度比較(λ=0.2)
3 結論
通過對對心直動滾子從動件盤形凸輪機構頂桿運動方程的近似解和精確解數(shù)值分析和比較,結果表明,只有當凸輪轉動中心到圓盤中心的距離與圓盤半徑加上滾子半徑之和的比值較小時,對心直動滾子從動件盤形凸輪機構近似解才接近精確解,此時,解的階數(shù)越高對精度影響不大;而比值較大時,一階、二階、三階近似解之間誤差也在增大,此時,多保留幾階,精確解與近似解誤差也加大。所以,在工程上,從對心直動滾子從動件盤形凸輪機構優(yōu)先選取凸輪轉動中心到圓盤中心的距離與圓盤半徑加上滾子半徑之和的比值較小的尺寸,才會達到預期運動的規(guī)律,對凸輪尺寸設計的合理設計提供了依據(jù)。
[1]唐國興,等.理論力學[M].北京:機械工業(yè)出版社,2011.
[2]楊可楨,等.機械設計基礎[M].北京:高等教育出版社,2006.
[3]王 波,陳立群.勻低速曲柄滑塊機構近似解與精確解比較[J].力學與實踐,2013,(3).
Comparison between exact and approximate solutions of disk cam mechanism for center-following roller followers
DONG Guanwen,LI Zongyi
(Gansu Mechanical&Electrical Vocational College,Tianshui 741001,Gansu China)
The approximate solution and exact solution of disk cam mechanism ejector rod motion equation for center-following roller followers have been analyzed and compared in the text.The exact expression of motion equation has been derived under ideal status.Byuse of the Taylor series and numerical example,the exact solutions of the displacement,velocity and acceleration expressions for ejector rod have been obtained, as well as respectivecorresponding first order,second order and third order approximate solutions.The results show that the approximate solution is close to the exact solution only when the ratio of the distance from the camrotation centerto the disccenter and sum of disc radius and roller radius roller is small.While the differences between the approximate and exact solutionsare large when the ratio is big.
Disk cam mechanism for center-following roller followers;Taylor series;Approximate solution; Exact solution
TH112.2
A
10.16316/j.issn.1672-0121.2017.02.024
1672-0121(2017)02-0082-04
2016-12-09;
2017-01-25
董冠文(1984-),男,助理講師,從事模具結構力學教研。
李宗義(1960-),男,教授,從事模具CAD方向教研。
E-mail:gansujidianxueyuan@163.com
