基于ADAMS的柔索行走機器人機構仿真分析
2017-05-30 10:48:04劉毅杜燕飛孫漢文劉志春
科技風 2017年3期
劉毅 杜燕飛 孫漢文 劉志春
摘 要:針對柔索行走機器人結構特點,建立柔索行走機器人三維模型,并基于ADAMS仿真軟件構建機器人虛擬樣機模型,模擬了仿真機器人跨越防震錘的整個過程,并得到了機器人各行走輪的位移-時間曲線,驗證了模型設計和越障過程的合理性,為機構設計提供數據方面的參考,為柔索行走機器人的研發提供可靠有力的依據。
關鍵詞:柔索行走;機器人;ADAMS;運動學仿真
近年來,機器人的應用領域越來越廣泛。尤其是用機器人代替人工實現柔索線路的自動化巡檢已經成為目前電力機器人研究的熱點之一。機器人仿真系統作為機器人設計和研究中方便、可靠的工具越來越受到重視,目前機器人動力學研究的主要方法有拉格朗日法、牛頓—歐拉法和凱恩方法等[ 1 ],南京林業大學的陳波等人利用三維建模軟件SolidWorks和ADAMS聯合建立仿生六足機器人的仿真模型[ 2 ]。
本文根據巡檢機器人的工作環境及功能要求,對巡檢機器人的本體結構進行了詳細設計,并對巡檢機器人的越障過程進行了規劃[ 3 ]。并利用ADAMS虛擬樣機對機器人的剛體模型和剛柔混合模型的越障過程進行了詳細的仿真分析,驗證了機器人越障的穩定性和動作規劃的合理性。
1 基于ADAMS的高空作業機器人越障過程仿真分析
機器人在跨越障礙時,需要通過各手臂的配合動作來調整機器人的姿勢,這就要求機器人具有良好的穩定性[ 4 ]。
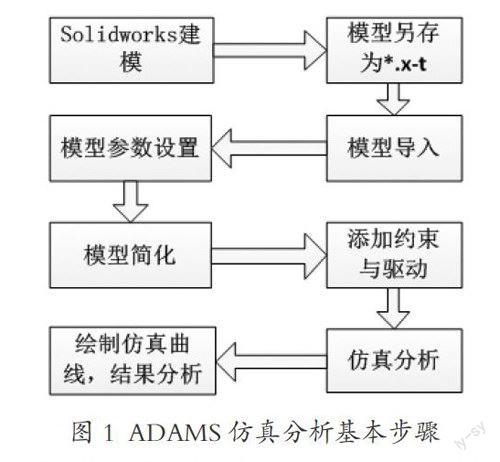
直接在ADAMS中建立機器人模型的過程較為復雜,因此為簡化操作步驟,在SolidWorks中建立機器人三維模型后,導入ADAMS軟件中[ 5 ]。具體操作步驟如圖1所示:
通過以上步驟,將機器人虛擬樣機導入ADAMS軟件中。
1.1 高空作業機器人越障過程分析
根據機器人實際跨越防震錘的情況,對各驅動添加相應的函數表示[ 6 ],仿真機器人跨越防震錘的整個過程。
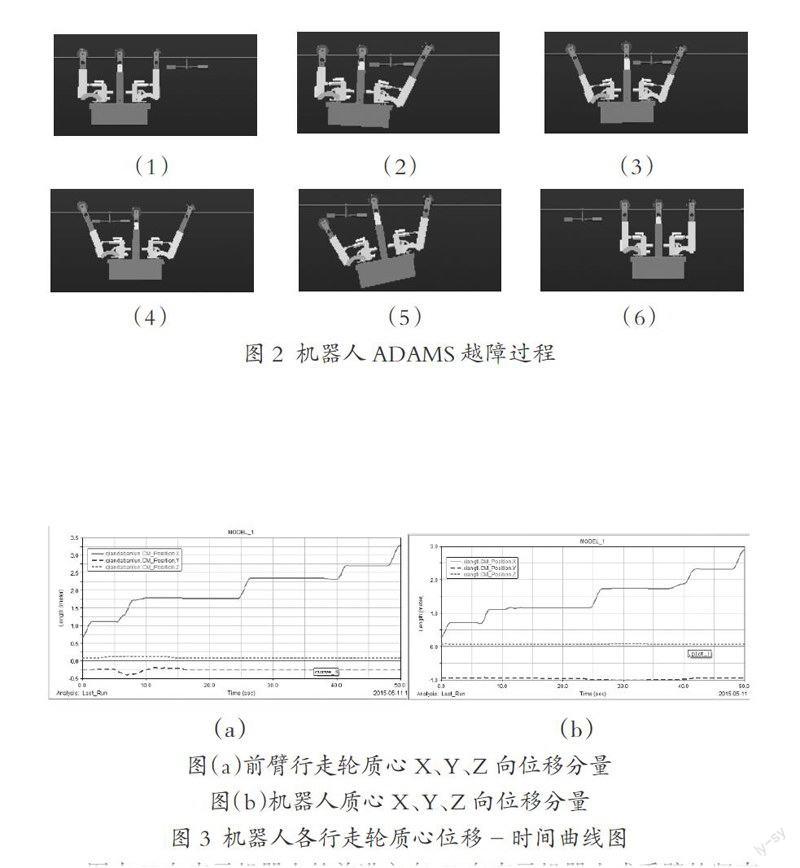
具體越障過程如圖2所示:
機器人初始狀態如圖(1)所示。
三臂同時掛線,且處于收縮狀態,當前臂檢測到障礙時,手臂伸長,行走輪脫離導線然后打開,然后調整手臂關節完成前臂的越障,機器人繼續前行至中臂上安裝的光電傳感器檢測到障礙,為保證中臂和后臂的順利越障,前臂伸長掛線的同時調整后臂的姿態,增大前后臂行走機構之間的距離。中臂伸長,行走輪打開,完成脫線動作,中臂收縮的同時前后臂伸長使控制箱下降,保證中臂行走輪的順利避障,如圖(2)-(4)所示。
因行走輪打開距離大于障礙物直徑,故行走輪可直接穿過障礙物,機器人繼續前行,后臂遇到障礙,中臂和后臂完成掛線動作,三臂恢復初始狀態,如圖(5)-(6)所示。機器人在三臂的配合下平穩快速地完成了整個越障過程。
1.2 高空作業機器人運動學仿真分析
在對機器人跨越防震錘的過程進行仿真后,利用ADAMS的后處理模塊得到機器人行走輪在X、Y、Z三個方向的位移-時間曲線如圖3所示。
圖中X向表示機器人的前進方向,Y向表示機器人或手臂的豎直移動方向,Z向表示行走輪的開合方向。0-1.5s三個行走輪同時驅動機器人前進,X向位移增加,1.5s時前臂傳感器檢測到障礙,機器人停止前進;1.5s-6.5s前后臂配合動作完成前臂的越障過程,前臂伸長,行走輪打開脫線,重新掛線。由于行走輪和導線之間接觸力的存在,前行走輪在Z方向會出現突變,符合實際情況,。8-12.5s表示中臂檢測到障礙,前后臂伸長,Y向位移增大,然后前行走輪掛線,閉合,Z向位移發生相應變化,如12.5-16s所示。中臂檢測到障礙,上升,行走輪打開,然后下降,中臂Y向曲線先上升后下降。26.5s時后臂檢測到障礙,中臂上升完成掛線,此時中臂越障過程結束;后臂在34-48s內進行和前臂相同的越障過程,48-50s機器人繼續前行,整個越障過程需要50s。通過提高機器人的行走速度可進一步縮短越障時間。
通過分析機器人的整個越障過程可以看出:
1)機器人控制箱的質心位移反映了整個機器人的重心變化,機器人在前、后機械臂脫離導線時會出現一定的波動,后逐漸趨于平穩。
2)整個機器人在跨越防震錘是所需時間為50s,提高了越障效率。
3)各個行走輪在整個越障過程中位移的變化也比較平穩,驗證了越障步驟規劃的科學性和合理性,同時驗證了模型的可行性。
2 結論
本文用ADAMS建立了巡檢機器人的虛擬樣機,對柔索行走機器人的越障過程進行了詳細的動力學仿真分析。得出機器人越障時各手臂以及行走輪的位移、速度仿真曲線,驗證了機器人越障(下轉第9頁)(上接第7頁)動作規劃的合理性和結構設計的合理性,對評價機器人的綜合性能起到了一定的借鑒作用。
參考文獻:
[1] 白麗平.基于ADAMS的機器人動力學仿真分析[J].機電工程,2007,24(7):74-77.
[2] 陳波,唐晶晶,姜樹海.基于ADAMS的仿生六足機器人運動仿真[J].計算機仿真,2012,29(9):182-186.
[3] Xiao Xiaohui,Wu Gongping.Dynamic simulation and experimental study of inspection robot for high-voltage transmission-line, Journal of Central South University of Technology,2005(6):726-731.
[4] 連金玲.氣動式輸電線路除冰機器人機械本體研究[D].青島:山東科技大學,2012.
[5] 鄭建榮.ADAMS虛擬樣機技術入門與提高[M].北京:機械工業出版社,2008.
[6] 蔡自興.機器人學[M].北京:清華大學出版社,2000.
作者簡介:
劉毅(1991-),男,漢族,山東德州人,碩士,山東科技大學機械電子工程學院,機械制造及其自動化專業;
杜燕飛(1994-),男,漢族,山東菏澤人,本科,山東科技大學機械電子工程學院,過程裝備與控制工程專業;
孫漢文(1995-),男,漢族,山東棲霞人,本科,山東科技大學機械電子工程學院,過程裝備與控制工程專業;
劉志春(1996-),男,漢族,山東滕州人,本科,山東科技大學機械電子工程學院,機械電子工程專業。
