考慮負(fù)載不確定的異步電機反饋線性化的最小損耗控制
2017-05-15 02:23:30王愛元李健顧春陽
電機與控制學(xué)報 2017年5期
王愛元, 李健, 顧春陽
(上海電機學(xué)院 電氣學(xué)院,上海 201306)
考慮負(fù)載不確定的異步電機反饋線性化的最小損耗控制
王愛元, 李健, 顧春陽
(上海電機學(xué)院 電氣學(xué)院,上海 201306)
研究異步電機負(fù)載變動時基于反饋線性化的最小損耗控制的實現(xiàn)問題。首先分析了異步電機的損耗特性,建立了受電機溫度時變參數(shù)影響小的最小損耗磁鏈控制模型,揭示了通過轉(zhuǎn)矩的實時估計對磁鏈進行控制可實現(xiàn)最小損耗控制。應(yīng)用微分幾何精確線性化的理論,建立了考慮負(fù)載轉(zhuǎn)矩不確定性的異步電機反饋線性化模型,實現(xiàn)了轉(zhuǎn)速和磁鏈的線性化解耦控制,電機轉(zhuǎn)矩的實時估計依據(jù)參考模型在電動機反饋線性化控制中實現(xiàn)。異步電機的反饋線性化控制既提高了動態(tài)時的響應(yīng)速度,又實現(xiàn)了穩(wěn)態(tài)時的輕載高效率運行。合理選取控制參數(shù),實現(xiàn)轉(zhuǎn)速、磁鏈以及轉(zhuǎn)矩估計的漸進收斂。仿真實驗表明所提控制方法的可行性和有效性。
異步電機;最小損耗;反饋線性化控制;參考模型;轉(zhuǎn)矩估計
0 引 言
異步電機作為主要的用電設(shè)備,具有結(jié)構(gòu)簡單、堅固耐用、成本低廉、運行可靠的優(yōu)點,其用電總量占世界工業(yè)用電量的60%。近年來,異步電機開始應(yīng)用于伺服控制,用于改善生產(chǎn)工藝,實現(xiàn)節(jié)能,但其固有的運行特性制約了其進一步的應(yīng)用。電機設(shè)計時最高運行效率在額定負(fù)載的75%左右,伺服系統(tǒng)對電機功率的選用要求裕量大,因此電機多工作在輕載狀態(tài)時運行效率低。隨著節(jié)能環(huán)保問題的日益突出,如何提高異步電機空載或輕載運行時的效率成為學(xué)術(shù)界和工程界迫切需要解決的問題。
目前,異步電機實現(xiàn)輕載高效率運行的基本原理是控制磁鏈隨負(fù)載減小而下降,從而使電機的損耗下降,效率和功率因數(shù)隨之提高,方法上可大體分為最小損耗模型控制[1-8]和搜索控制[9-17]。最小損耗模型控制是以精確的數(shù)學(xué)描述為基礎(chǔ),通過嚴(yán)格的實驗和計算建立異步電機損耗模型,解析地求出總損耗的最小點,以最小損耗為目標(biāo)控制電動機的運行。搜索控制不依賴于電動機的精確模型,依據(jù)電動機的某一運行參數(shù)如電流、功率因數(shù)等進行搜索控制。這些方法由于電機控制技術(shù)的發(fā)展聯(lián)系在一起。
早期的研究,針對于標(biāo)量控制相結(jié)合的節(jié)能控制有轉(zhuǎn)差頻率控制、壓頻比控制和功率因數(shù)控制[1-4,14-17],隨后與矢量控制技術(shù)相結(jié)合的節(jié)能控制開始提出[5,9-13]。這些研究大多數(shù)沒有考慮電機繞組電阻隨溫度的變化,也不能兼顧電動機的動態(tài)性能,因此在實踐中也沒有得到很好的應(yīng)用。
近年來,也出現(xiàn)了與現(xiàn)代控制理論和智能控制理論相結(jié)合的節(jié)能控制:文獻[6-8]將反步控制應(yīng)用于異步電動機的節(jié)能控制;Osama S等采用人工神經(jīng)網(wǎng)優(yōu)化磁鏈實現(xiàn)了異步電機基于損耗模型的標(biāo)量控制[18];Asghar Taheri等在直接轉(zhuǎn)矩控制中采用自適應(yīng)的梯度搜索算法實現(xiàn)節(jié)能控制[19];文獻[20-21]將預(yù)測控制運用于電動機的動態(tài)節(jié)能控制。
本文首先建立了一種不隨溫度變化的最小損耗磁鏈控制模型,模型考慮了電動機不同的運行工況、電機的設(shè)計特點以及磁路的飽和特性,根據(jù)轉(zhuǎn)矩的變化對磁鏈進行控制實現(xiàn)最小損耗;隨后根據(jù)微分幾何的理論建立了轉(zhuǎn)速和磁鏈解耦的反饋線性化控制,依據(jù)模型參考的偏差系統(tǒng)的穩(wěn)定性建立了轉(zhuǎn)矩的估計模型,根據(jù)估計的轉(zhuǎn)矩實現(xiàn)線性化反饋控制以及對磁鏈實施最小損耗的在線控制;最后通過仿真實驗驗證所提出的控制方案。
1 異步電機最小損耗分析
籠型異步電機在兩相靜止坐標(biāo)系(α-β坐標(biāo)系)下,以轉(zhuǎn)子角速度、磁鏈和定子電流為狀態(tài)變量的動態(tài)方程為:
(1)

電機的磁鏈和電磁轉(zhuǎn)矩分別為:
(2)
(3)
穩(wěn)態(tài)時,dφrα/dt=dφrβ/dt=0,由式(1)的第2個、第3個方程得:
(4)
忽略機械損耗,電機的損耗為
(5)
由式(2)~式(5),得
(6)

由?p/?φr=0,得電動機最小損耗對應(yīng)的磁鏈為
(7)
式(7)表明,最小損耗對應(yīng)的磁鏈與轉(zhuǎn)矩和定轉(zhuǎn)子繞組的電阻、電感有關(guān)。實際運行的電機,轉(zhuǎn)矩是不方便也不容易測量的,但可以通過下文的基于參考模型的電動機線性化反饋控制偏差進行估計;優(yōu)化的磁鏈小于電機的額定磁鏈,磁路保持線性,因此Lm和Lr保持不變;定轉(zhuǎn)子繞組的電阻Rs和Rr隨繞組溫度的變化同時增大或減小,但其Rr/Rs保持不變。綜合以上分析,最小損耗時磁鏈的控制關(guān)鍵是對轉(zhuǎn)矩進行實時估計。
式(7)同時表明,最小損耗對應(yīng)的磁鏈的平方與電磁轉(zhuǎn)矩成正比;但電機受限于磁路的飽和,其磁鏈低于額定磁鏈。
通常電動機的最高效率設(shè)計在額定負(fù)載轉(zhuǎn)矩的75%左右,此時電機的磁鏈接近額定磁鏈,輸出轉(zhuǎn)矩繼續(xù)增大,磁鏈保持額定磁鏈不變。同時電機在起動、調(diào)速等動態(tài)過程中,其輸出轉(zhuǎn)矩往往大于額定轉(zhuǎn)矩,這時磁鏈也要保持在額定磁鏈不變。因此由式(7)得到電動機轉(zhuǎn)矩低于75%額定轉(zhuǎn)矩時最小損耗對應(yīng)的磁鏈,是針對電機空載或輕載時的最小損耗節(jié)能控制。因此,式(7)進一步表示為:
(8)
式(8)中最小損耗的磁鏈控制的轉(zhuǎn)矩切換點可根據(jù)具體的電機做適當(dāng)?shù)恼{(diào)整。
2 輸入輸出線性化控制
對于式(1),重新定義狀態(tài)向量
x=[x1,x2,x3,x4,x5]T=[ω,φrα,φrβ,isα,isβ]T。
(9)
輸入向量為
(10)
輸出向量為
(11)

(12)
按照系統(tǒng)輸入輸出反饋線性化的方法,對2個輸出變量依次取高階時間導(dǎo)數(shù),直至導(dǎo)數(shù)中出現(xiàn)輸入變量,得到采用李導(dǎo)數(shù)的表達(dá)式如下:
(13)
根據(jù)微分幾何的理論,系統(tǒng)的相對階為2+2=4,系統(tǒng)可以分為轉(zhuǎn)速和磁鏈2個相互獨立的2階子系統(tǒng),而根據(jù)式(12)系統(tǒng)為5階系統(tǒng),因此要實現(xiàn)輸入輸出線性化,可引入轉(zhuǎn)子磁場位置角作為第3個輸出變量,如下式所示:
(14)

(15)
引入非線性變換為
(16)

(17)
式(17)中的第2、第4個方程進一步表示為
(18)
式中v1、v2分別為轉(zhuǎn)速和磁鏈幅值平方的虛擬控制輸入。系統(tǒng)的線性化控制律為
(19)
考慮到系統(tǒng)(17)中z3為轉(zhuǎn)子磁場的位置角屬于慢時變的狀態(tài)變量,與系統(tǒng)的轉(zhuǎn)速、磁鏈相比短期內(nèi)與系統(tǒng)的能量存儲無關(guān),因此在Lyapunov意義下是穩(wěn)定的,系統(tǒng)的零動態(tài)是穩(wěn)定的,可以采用輸入輸出線性化的控制。

3 控制器設(shè)計和基于參考模型的偏差系統(tǒng)
虛擬控制v1、v2重新設(shè)計如下:
(20)
控制參數(shù)k11、k12、k21、k22的選擇首先要保證系統(tǒng)的穩(wěn)定性和控制品質(zhì),其次要保證控制器不能進入飽和狀態(tài),即由式(19)、式(20)得到的電機系統(tǒng)的控制電壓低于額定電壓。
在控制作用下系統(tǒng)可進一步表示為:
(21)
穩(wěn)態(tài)時擾動誤差eτ=0,因此可以選擇如下的參考模型:
(22)

e= [e11,e12,e21,e22]T=
[z11-z11M,z12-z12M,z21-z21M,z22-z22M]T。
(23)
根據(jù)式(21)和式(22),得偏差微分方程為
Ke+Teτ。
(24)
4 系統(tǒng)的穩(wěn)定性分析和轉(zhuǎn)矩的估計
式(24)含有狀態(tài)偏差和擾動偏差,可選擇以下Lyapunov函數(shù)
(25)
式中:P為正定實對稱矩陣;λ為適當(dāng)?shù)恼龑崝?shù)。矩陣P同時滿足KTP+PK=-Q,其中Q為正定實對稱矩陣。
V沿偏差方程(24)求導(dǎo)數(shù),得
(26)
注意到式(26)中(TTPe)T=eTPT,且均為標(biāo)量,因此
(27)

(28)

5 仿真實驗
為驗證所建立的異步電機反饋線性化的最小損耗控制的有效性,首先在Matlab/SIMULINK平臺上建立控制系統(tǒng)模型,包括異步電機、磁鏈觀測、線性反饋控制、轉(zhuǎn)矩估計、最小損耗磁鏈控制模塊。其次對一臺4kW極對數(shù)為2的異步電動機進行實驗,測得主要參數(shù)如表1所示,以此作為電動機的仿真和實驗的參數(shù)。

表1 異步電機的主要參數(shù)Table 1 Main parameters of induction motor
5.1 系統(tǒng)仿真
仿真分動態(tài)仿真和穩(wěn)態(tài)仿真2個方面,動態(tài)仿真主要驗證線性化反饋控制和轉(zhuǎn)矩估計算法的有效性,穩(wěn)態(tài)仿真主要驗證電機最小損耗的控制。Lyapunov函數(shù)式(25)中與P相關(guān)聯(lián)的矩陣Q取單位矩陣,λ=100。控制參數(shù)如下:
動態(tài)仿真過程如下:在0秒時刻滿載起動;2秒時刻進入轉(zhuǎn)速穩(wěn)定狀態(tài);10秒時刻電機的負(fù)載轉(zhuǎn)矩階躍性地由TN變?yōu)?.3TN。圖1、圖2為動態(tài)仿真的結(jié)果。
圖1為電機的輸出響應(yīng)及對轉(zhuǎn)矩的估計,其中圖1(a)、圖1(b)分別為轉(zhuǎn)速和磁鏈的跟蹤曲線,圖1(c)為負(fù)載轉(zhuǎn)矩和估計轉(zhuǎn)矩曲線。仿真表明在電機起動階段轉(zhuǎn)速和磁鏈均能快速地跟蹤指令值,估計轉(zhuǎn)矩遠(yuǎn)遠(yuǎn)高于額定負(fù)載轉(zhuǎn)矩,使得磁鏈的指令值迅速變?yōu)轭~定磁鏈;當(dāng)負(fù)載轉(zhuǎn)矩在10s時刻發(fā)生突變時,轉(zhuǎn)速馬上有一個波動,隨后又跟隨轉(zhuǎn)速指令,而磁鏈的變化要取決于估計轉(zhuǎn)矩,從10.5s時刻開始估計轉(zhuǎn)矩開始低于0.75TN,磁鏈沿式(8)確定的優(yōu)化磁鏈曲線變化,這說明轉(zhuǎn)速和磁鏈的跟蹤控制是獨立的。
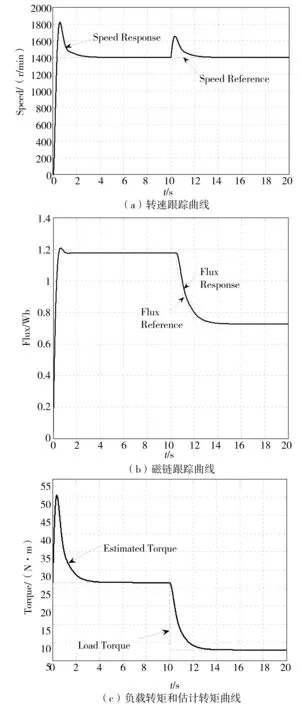
圖1 電機的輸出響應(yīng)及對轉(zhuǎn)矩的估計Fig.1 Output response and estimated torque
圖2為負(fù)載轉(zhuǎn)矩變化前后估計轉(zhuǎn)矩、磁鏈和損耗的變化曲線,表明當(dāng)估計的轉(zhuǎn)矩低于0.75TN時,磁鏈開始向額定磁鏈以下調(diào)節(jié);而對應(yīng)的損耗在負(fù)載轉(zhuǎn)矩發(fā)生變化的10s時刻就開始下降,這是由于負(fù)載轉(zhuǎn)矩向下調(diào)節(jié),轉(zhuǎn)速指令沒有變化,輸入電機的電能有所下降使得損耗有所下降。隨著磁鏈向下調(diào)節(jié),損耗加速下降。
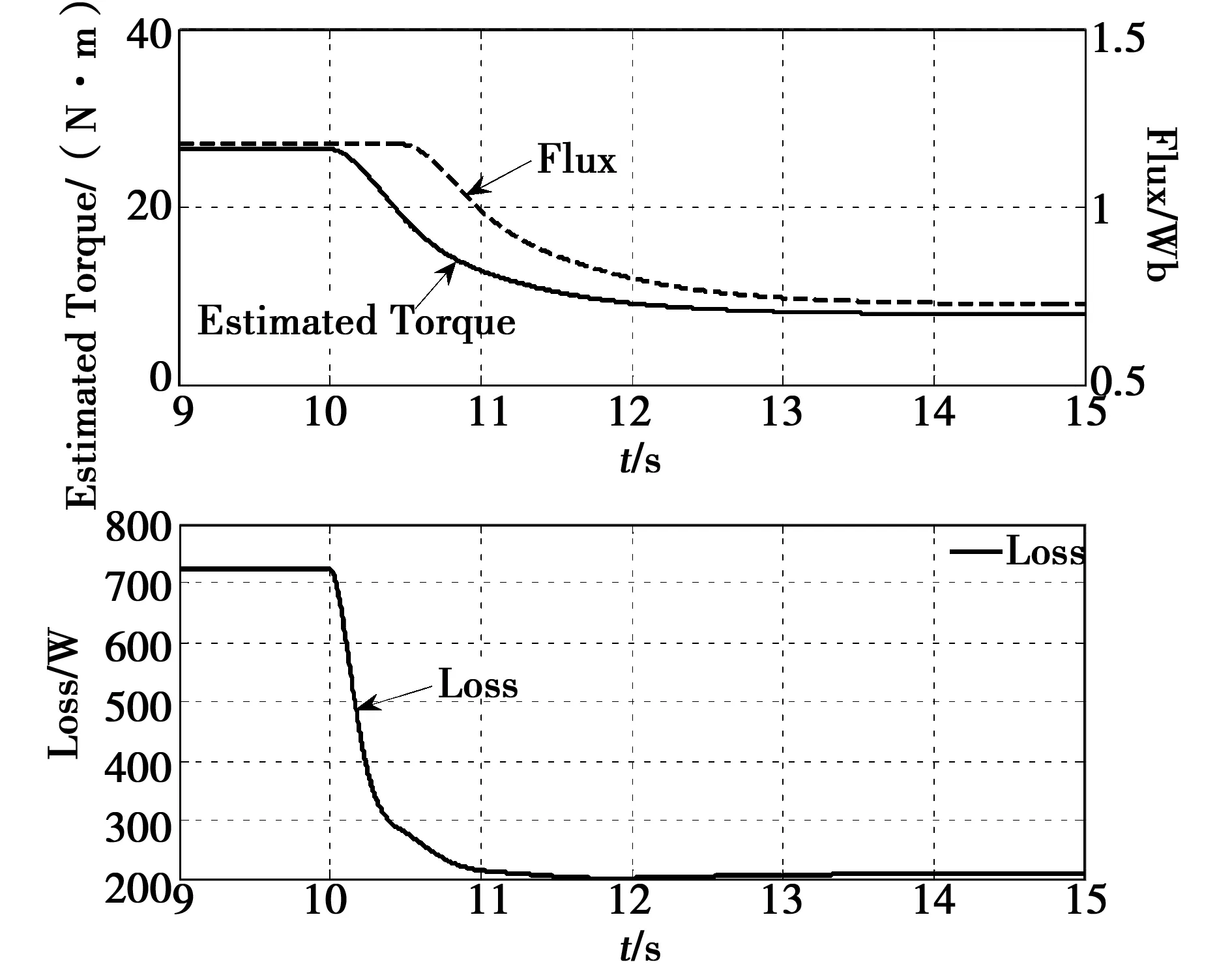
圖2 負(fù)載轉(zhuǎn)矩變化時估計轉(zhuǎn)矩、磁鏈和損耗的變化曲線Fig.2 Varied curves of estimated torque,flux and loss with load torque
圖1、圖2的仿真還表明在轉(zhuǎn)速和磁鏈子系統(tǒng)取相同控制參數(shù)的情況下,轉(zhuǎn)速的超調(diào)要大于磁鏈的超調(diào),這是由于轉(zhuǎn)矩估計的適應(yīng)律式(28)與轉(zhuǎn)速子系統(tǒng)式(18)的第1個方程還存在一定的耦合;但這不影響最小損耗的控制。
穩(wěn)態(tài)仿真針對于電機帶低于額定負(fù)載的轉(zhuǎn)矩在優(yōu)化磁鏈控制下穩(wěn)態(tài)長期運行,并與保持額定磁鏈控制時的損耗進行比較。圖3給出了2種磁鏈控制方式在電機額定轉(zhuǎn)速運行時的比較。仿真表明最小損耗的優(yōu)化磁鏈控制節(jié)能效果要優(yōu)于恒定的額定磁鏈,特別是負(fù)載轉(zhuǎn)矩低于0.3TN。隨著負(fù)載轉(zhuǎn)矩的增大,兩種磁鏈控制的損耗趨于一致。
5.2 實驗
以DSPTMS320F28335為控制核心搭建實驗系統(tǒng),1臺4kW的直流發(fā)電機作為異步電動機的負(fù)載,負(fù)載的調(diào)節(jié)通過直流發(fā)電機外接的變阻器實現(xiàn),電動機上安裝增量式旋轉(zhuǎn)編碼器用于測量轉(zhuǎn)速,通過霍爾電流傳感器測量輸入電動機的電流,通過分壓濾波對輸入電動機的電壓進行測量,通過對測量的電壓、電流進行適當(dāng)運算得到電動機的輸入功率和轉(zhuǎn)子磁鏈的觀測。
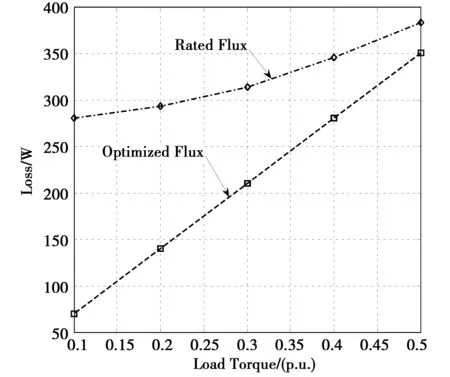
圖3 優(yōu)化磁鏈控制和恒定額定磁通控制的損耗比較Fig.3 Loss comparison of optimized flux and rated flux
圖4為額定轉(zhuǎn)速下負(fù)載轉(zhuǎn)矩由0.8TN變?yōu)?.3TN時轉(zhuǎn)速、磁鏈、估計轉(zhuǎn)矩和損耗的變化曲線。實驗表明:隨著轉(zhuǎn)矩的下降,轉(zhuǎn)速有1個向上波動的變化過程,隨后趨于平穩(wěn);磁鏈的變化隨著估計轉(zhuǎn)矩的下降向下調(diào)節(jié),而當(dāng)估計的轉(zhuǎn)矩趨于負(fù)載轉(zhuǎn)矩時,電機的運行趨于穩(wěn)態(tài),磁鏈也不再向下調(diào)節(jié);損耗先有1個急劇的下降,隨著轉(zhuǎn)速的穩(wěn)定和磁鏈調(diào)節(jié)的結(jié)束,損耗保持為1個小的多的數(shù)值。負(fù)載轉(zhuǎn)矩變化時轉(zhuǎn)速、磁鏈、估計轉(zhuǎn)矩和損耗的變化與仿真的結(jié)果基本一致。
圖5為電機電動機額定轉(zhuǎn)速下帶不同的負(fù)載轉(zhuǎn)矩穩(wěn)態(tài)運行時的實驗損耗與仿真所得損耗的比較。仿真實驗表明電動機所帶負(fù)載轉(zhuǎn)矩低于額定負(fù)載轉(zhuǎn)矩時,最小損耗的磁鏈優(yōu)化損耗明顯低于額定磁鏈損耗,并且負(fù)載轉(zhuǎn)矩越小,節(jié)能效果越顯著。
通過對實驗與仿真的損耗比較也能發(fā)現(xiàn),實驗損耗要高于仿真損耗,且負(fù)載轉(zhuǎn)矩越小其差距越明顯,這是因為為了簡化分析最小損耗磁鏈優(yōu)化模型以及線性化反饋控制模型都忽略了空載機械損耗和等效鐵耗,式(8)是基于最小損耗的定轉(zhuǎn)子銅耗的磁鏈優(yōu)化控制,沒有考慮等效的鐵耗電阻;但即使這樣輕載時優(yōu)化的磁鏈要低于額定磁鏈,根據(jù)電機學(xué)的理論,鐵耗也會相應(yīng)下降,因此總損耗也是下降的,這與前人的研究[5-14]結(jié)論是一致的。
鑒于現(xiàn)階段電動機空載機械損耗和等效鐵耗的準(zhǔn)確測量和計算還是比較困難的,最小損耗和轉(zhuǎn)速控制忽略這2種損耗也是一種簡潔有效的方法。
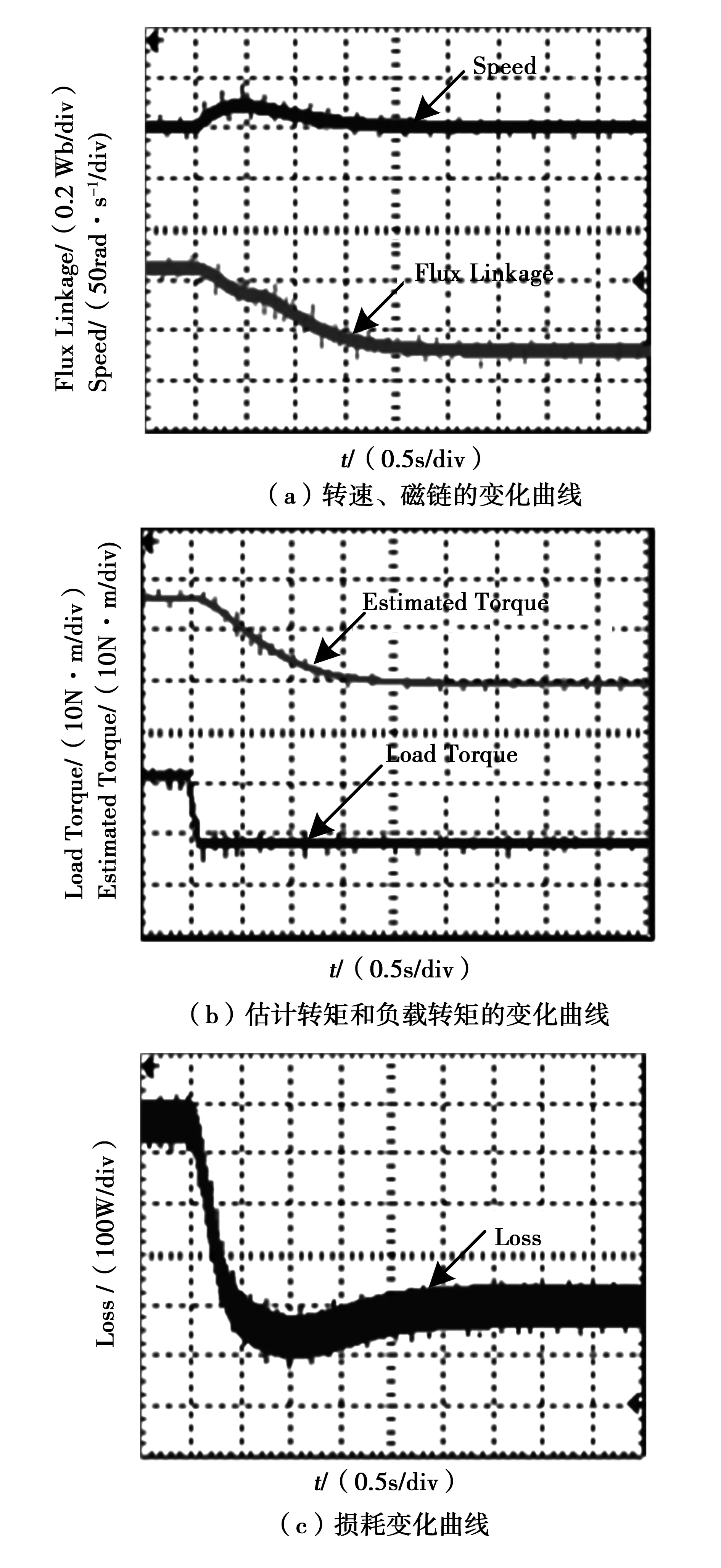
圖4 實驗獲得的轉(zhuǎn)速、磁鏈、估計轉(zhuǎn)矩和損耗隨負(fù)載轉(zhuǎn)矩的變化曲線Fig.4 Experimental varied curves of speed,estimated torque,flux and loss with load torque
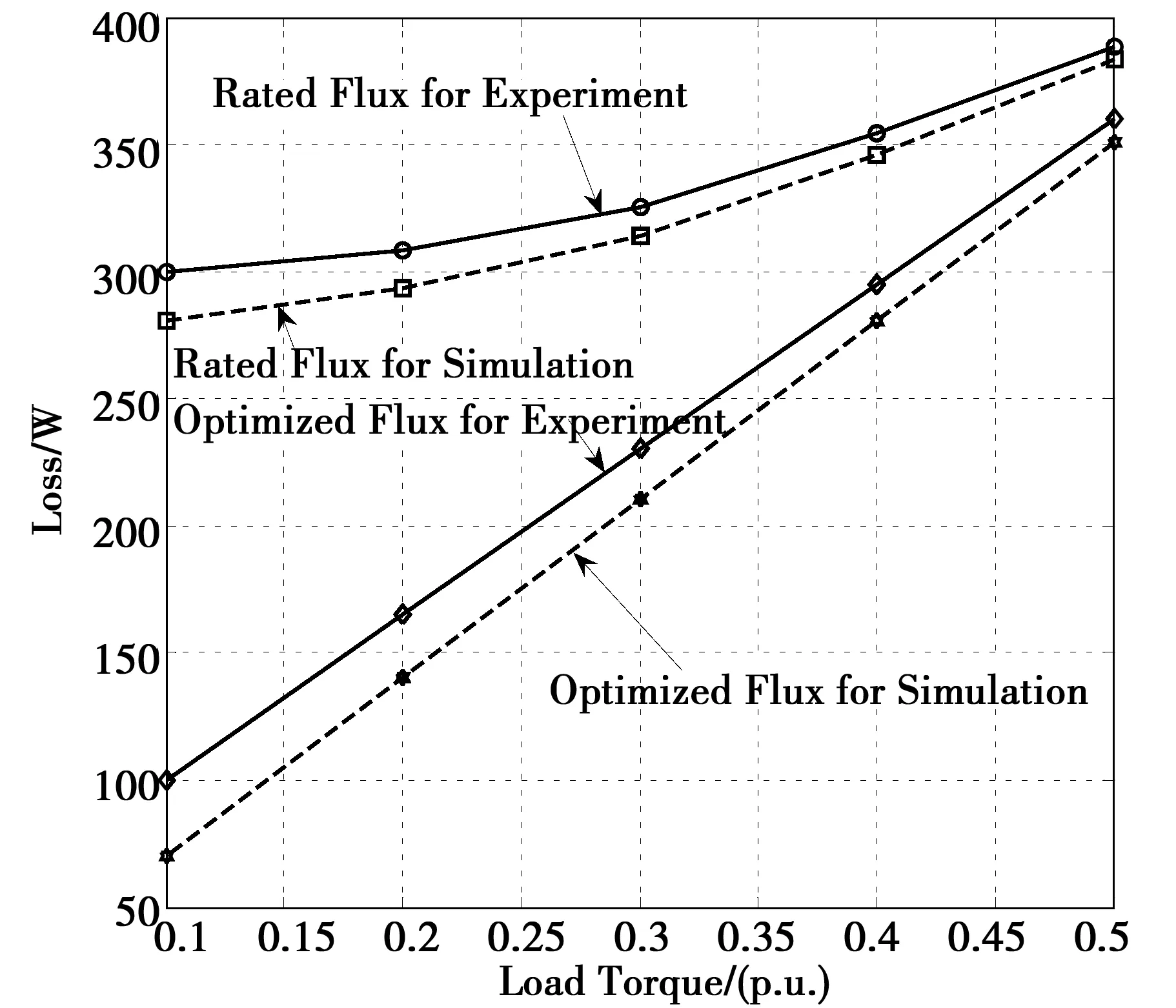
圖5 實驗與仿真的損耗比較Fig.5 Loss comparisons for experiment and simulation
6 結(jié) 論
本文建立了考慮磁路飽和、受溫度等時變參數(shù)影響小的異步電機最小損耗磁鏈控制模型以及反饋線性化控制模型,采用基于參考模型的偏差系統(tǒng)實現(xiàn)電磁轉(zhuǎn)矩的估計,根據(jù)估計的轉(zhuǎn)矩實現(xiàn)最小損耗控制和線性化的反饋控制,仿真實驗表明:
1)線性化反饋控制實現(xiàn)了轉(zhuǎn)速、磁鏈的獨立線性反饋控制;
2)電磁轉(zhuǎn)矩的估計能夠準(zhǔn)確反映電動機的動態(tài)和負(fù)載轉(zhuǎn)矩的變化;
3)負(fù)載轉(zhuǎn)矩下降時,節(jié)能效果明顯優(yōu)于恒磁通控制。
未來的工作是促進最小損耗和線性化反饋控制的工程化,進一步研究考慮空載機械損耗和鐵耗的最小損耗控制。
[1] KIRSCHEN Daniel S,NOVOTNY Donald W,SUWANWISOOT Warin.Minimizing induction motor losses by excitation control in variable frequency drive[J].IEEE Transaction on Industry Applications,1984,20(5): 1244-1250.
[2] 李陽,張曾科,常進.基于轉(zhuǎn)差率的感應(yīng)電機最優(yōu)效率控制[J].電機與控制學(xué)報,2005,9(3):215-217. LI Yang,ZHANG Zengke,CHANG Jin.Slip frequency based optimal efficiency control of induction motor[J].Electric Machines and Control,2005,9(3):215-217.
[3] Andersen H R,Pedersen J K.Low cost energy optimized control strategy for a variable speed three-phase induction motor[C].IEEE Power Electronics Specialists Conference,1996,1: 920-924.
[4] 常進, 張曾科.感應(yīng)電機恒功率因數(shù)控制的研究[J].中國電機工程學(xué)報,2002,22(11):70-74. CHANG Jin,ZHANG Zengke.The research on constant power factor control of induction motor[J].Proceedings of the Chinese Society for Electrical Engineering,2002,22(11):70-74.
[5] UDDIN M Nasir,SANG Woo Nam.New Online loss-minimization-based control of an induction motor drive[J].IEEE Transactions on Power Electronics,2008,23(2): 926-933.
[6] UDDIN M Nasir,SANG Woo Nam.Development of a Nonlinear and model-based online loss minimization control of an im drive[J].IEEE Transactions on Energy Conversion,2008,23(4):1015-1024.
[7] HAJIANM,SOLTANI J,MARKADEH G A,et al.Adaptive nonlinear direct torque control of sensorless im drives with efficiency optimization[J].IEEE Transactions on Industrial Electronics,2010,57(3):975-985.
[8] 苗敬利,李華德,胡廣大,等.感應(yīng)電機效率優(yōu)化的自適應(yīng)反步控制研究[J].電機與控制學(xué)報,2009,13(9):749-753. MIAO Jingli,LI Huade,HU Guangda,et al.Efficiency optimization control of induction motors based on adaptive backstepping method[J].Electric Machines and Control,2009,13(9):749-753.
[9] SOUSA Gilberto C D,BOSE Bimal K,CLELAND John G.Fuzzy logic based on-line efficiency optimization control of an indirect vector-controlled induction motor drive[J].IEEE Transactions on Industrial Electronics,1995,42(2):192-198.
[10] BOSE B K,PATAL N R,RAJASHEKARA K.A neuro-fuzzy-based on-Line efficiency optimization control of a stator flux-oriented direct vector-controlled induction motor drive[J].IEEE Transactions on Industrial Electronics,1997,44(2):270-273.
[11] ABDINE S,GHONEEM G A,DIAB H M M,et al. Efficiency optimization of a vector controlled induction motor drive using an artificial neural network[C].The 29th Annual Conference of the IEEE on Industrial Electronics Society,2003,3: 2543-2548.
[12] 劉小虎,謝順依,鄭力捷.一種改進的感應(yīng)電機最大效率控制技術(shù)研究[J].中國電機工程學(xué)報,2005,25(6): 95-98. LIU Xiaohu,XIE Shunyi,ZHENG Lijie.Improvement of efficiency-optimization control of induction motor drives [J].Proceedings of the CSEE,2005,25(6): 95-98.
[13] 張立偉,溫旭輝,鄭瓊林.異步電機用混合式模糊搜索效率優(yōu)化控制研究[J].中國電機工程學(xué)報,2007,27(27): 83-87. ZHANG Liwei,WEN Xuhui,ZHENG Qionglin.Fuzzy logic based hybrid search control strategy for efficiency optimization control of induction motors[J].Proceedings of the CSEE,2007,27(27): 83-87.
[14] KIRSCHEN D S,NOVOTNY D W,LIPO T A.On-line efficiency optimization of a variable frequency induction moter drive[J].IEEE Transaction on Industry Applications,1985,IA-21(4): 610-615.
[15] KIRSCHEN D S,NOVOTNY D W,LIPO T A.Optimal efficiency control of an induction motor drive[J].IEEE Transactions Energy Conversion,1987,2(3): 70-76.
[16] SULS K,PARK M H.A novel technique for optimal efficiency control of a current-source inverter-fed induction motor[J].IEEE Transactions on Power Electronics,1988,3(2):192-199.
[17] KIOSKERIDIS I,MARGARIS N.Loss minimization in scalar-controlled induction motor drives with search controllers[J].IEEE Transactions on Power Electronics,1996,11(2): 213-220.
[18] EBRAHIM Osama S,BADR Mohamed A,ELGENDY Ali S,et al.Ann-based optimal energy control of induction motor drive in pumping applications[J].IEEE Transactions on Energy Conversion,2010,25(3): 652-660.
[19] TAHERI Asghar,RAHMATI Abdolreza,KABOLI Shahriyar.Efficiency Improvement in DTC of Six-Phase Induction machine by adaptive gradient descent of flux[J].IEEE Transactions on Power Electronics,2012,27(3): 1552-1562.
[20] STUMPER Jean-Francois,D?TLINGER Alexander,KENNEL Ralph.Loss minimization of induction machines in dynamic operation[J].IEEE Transactions on Energy Conversion,2013,28(3):726-735.
[21] VARGAS René,RODRIGUEZ Jose,ROJAS Christian A,et al.Predictive control of an induction machine fed by a matrix converter with increased efficiency and reduced common-mode voltage[J].IEEE Transactions on Energy Conversion,2014,29(2): 473-485.
Developing loss minimization of induction motors based on feedback linearization control considering load uncertainties
WANG Ai-yuan, LI Jian, GU Chun-yang
(School of Electric Engineering,Shanghai Dianji University,Shanghai 201306,China)
The research is about the loss minimization for variable load torque of induction motors with feedback linearization control.Flux control model for minimal loss without affection by time-varying parameters was deduced.Loss minimization of the motors was achieved by adjusting the flux according the torque variety.Based on exact linearization of differential geometry theory,the model of feedback linearization control considering torque disturbance was presented.The speed and the flux can be decoupling controlled in linearization.The motor torque was estimated online by reference model of the feedback linearization control.The feedback linearization control for induction motors increase dynamic response ability,as well as high efficiency operating at light loads.The speed,flux and estimated torque can realize asymptotic convergence with reasonable control parameters.The simulation and experiment results verify the feasibility and effectiveness of the proposed scheme.
induction motors; loss minimization; feedback linearization control; reference model; torque estimated
2015-10-14
國家自然科學(xué)基金(61374136);上海電機學(xué)院登峰學(xué)科建設(shè)(15DFXK01)
王愛元(1968—),男,博士,副教授,研究方向為電動機節(jié)能、新型電機及其控制; 李 健(1991—),男,碩士研究生,研究方向為新型電機設(shè)計與控制; 顧春陽(1988—),男,碩士研究生,研究方向為電機與電器控制。
王愛元
10.15938/j.emc.2017.05.010
TM 34
A
1007-449X(2017)05-0073-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19