異步起動永磁同步電動機起動過程中永磁體平均工作點的解析計算
2017-05-15 02:23:01唐旭王秀和徐定旺
電機與控制學報 2017年5期
關鍵詞:模型
唐旭, 王秀和, 徐定旺
(1.山東大學 電氣工程學院,山東 濟南 250061;2.青島理工大學 自動化工程學院,山東 青島 266520)
異步起動永磁同步電動機起動過程中永磁體平均工作點的解析計算
唐旭1,2, 王秀和1, 徐定旺1
(1.山東大學 電氣工程學院,山東 濟南 250061;2.青島理工大學 自動化工程學院,山東 青島 266520)
針對采用時步有限元法研究異步起動永磁同步電動機起動過程中永磁體工作點的變化時存在計算時間長、不適合電機設計階段的快速計算的問題,通過將異步起動永磁同步電動機的動態數學模型和磁路計算模型結合,建立了異步起動永磁同步電動機起動過程中永磁體平均工作點的解析計算模型。利用該解析計算模型計算了3臺樣機起動過程中永磁體平均工作點的變化,分別得到了電機起動過程中最大退磁磁場出現時的永磁體平均工作點和電機穩定運行時的永磁體平均工作點。通過與有限元法的計算結果作比較,驗證了該解析計算模型的準確性,可為該類電機的快速設計提供參考。
異步起動永磁同步電動機;動態數學模型;磁路計算模型;起動過程;平均工作點
0 引 言
異步起動永磁同步電動機在結構上可以看作是在感應電動機的轉子鐵心內放置了永磁體,依靠轉子鼠籠產生的異步轉矩實現自起動[1-2],具有功率因數高、效率高、經濟運行范圍寬等優點,在高效節能場合具有廣闊的應用前景[3]。
與其他類型的永磁電機一樣,異步起動永磁同步電動機在實際使用過程中,當永磁體的工作點低于永磁體退磁曲線拐點時,永磁體會發生不可逆退磁[4-5],這不僅會導致電機的反電動勢減小、起動電流增大[2],還會導致電機的效率下降,并可能產生轉矩波動及振動噪聲[6-7]。
在異步起動永磁同步電動機的起動過程中,定子繞組和轉子鼠籠導條中的電流會產生強退磁磁場,使永磁體的工作點不斷變化,可能導致永磁體發生不可逆退磁。異步起動永磁同步電動機起動過程中的永磁體退磁問題得到了廣泛的研究:文獻[8]利用二維有限元法計算了電機起動過程中永磁體某點磁密值的變化,并分析了永磁體退磁磁場產生的原因;文獻[9]和文獻[10]利用二維有限元法計算了電機起動過程中永磁體平均工作點的變化,并研究了電樞磁動勢對永磁體的退磁作用以及負載條件、電源電壓等因素對永磁體退磁的影響。可以看出,現有文獻基本都采用時步有限元法研究異步起動永磁同步電動機起動過程中永磁體工作點的變化,尚未有文獻建立電機起動過程中永磁體平均工作點的解析計算模型。
在異步起動永磁同步電動機的設計階段,為了保證電機在實際運行中永磁體不發生不可逆退磁,需要校核永磁體的最小平均工作點(永磁體遇到最大退磁磁場時的平均工作點),并使其不低于某一限定值。傳統的計算方法所基于的假設是:電機起動至接近同步速時,轉子鼠籠對轉子內永磁體的屏蔽作用減弱,電樞磁動勢對永磁體的去磁作用最為嚴重[11];但是并不能保證在電機的實際起動過程中,永磁體的平均工作點不會低于該計算值。有限元法能夠計算永磁體各點的磁密分布,可以方便的計算電機起動過程中永磁體最小工作點和平均工作點的變化;但是有限元法建模復雜、計算周期長[12-13],不適合電機設計階段的快速計算。
本文通過將異步起動永磁同步電動機的動態數學模型和磁路計算模型結合,建立了電機起動過程中永磁體平均工作點的解析計算模型,能夠快速計算并分析起動過程中永磁體平均工作點的變化,可為該類電機的設計提供參考。本文以3臺異步起動永磁同步電動機為例,在Matlab/SIMULINK中建立了相應的計算模型,計算并分析了電機起動過程中永磁體平均工作點的變化。利用有限元法驗證了所建立解析計算模型的計算準確性,并得到了相應的結論。
1 起動過程中永磁體平均工作點的解析計算模型
1.1 異步起動永磁同步電動機的動態數學模型
本文建立的異步起動永磁同步電動機起動過程中永磁體平均工作點的解析計算模型主要包括電機的動態數學模型和磁路計算模型兩部分。
三相靜止ABC坐標系下的電機動態數學模型十分復雜,通過坐標變換(本文采用正交變換)將其變換到兩相旋轉dq0坐標系下,可以使方程得以簡化,便于計算分析。文獻[14-16]建立了異步起動永磁同步電動機在dq0坐標系下的動態數學模型,電壓方程為:
(1)
式中:d軸為轉子永磁磁場的軸線方向,q軸在空間超前d軸90°電角度;ud、uq分別為定子直、交軸繞組的電壓;u2d、u2q分別為轉子直、交軸繞組的電壓;R1為定子每相繞組的電阻;R2d、R2q分別為轉子直、交軸繞組的電阻;id、iq分別為定子直、交軸繞組的電流,i2d、i2q分別為轉子直、交軸繞組的電流;ψd、ψq分別為定子直、交軸繞組的磁鏈,ψ2d、ψ2q分別為轉子直、交軸繞組的磁鏈;ωr為電機轉子旋轉的電角速度。需要注意的是,上述轉子各量已歸算到定子側。
磁鏈方程為:
(2)

電磁轉矩方程為
Tem=p(ψdid-ψqiq)。
(3)
式中p為電機的極對數。
不計鐵耗和附加損耗時,機械運動方程為
(4)
式中:J為電機轉子和負載的轉動慣量之和;TL為負載轉矩。
利用異步起動永磁同步電動機的動態數學模型,可以計算電機起動過程中各時刻的定轉子直、交軸繞組電流等數據,為利用磁路計算模型計算永磁體的平均工作點奠定了基礎。
1.2 異步起動永磁同步電動機的磁路計算模型
永磁電機負載時的等效磁路計算模型如圖1所示[11]。其中,fc、fm、fd分別為永磁體磁動勢、外磁路磁動勢和等效增(去)磁磁動勢的標幺值,對于異步起動永磁同步電動機,該增(去)磁磁動勢是定轉子繞組的直軸合成磁動勢;λ0、λδ、λσ分別為永磁體內磁導、主磁路磁導和漏磁路磁導的標幺值;φm、φδ、φσ分別為永磁體、主磁路和漏磁路磁通的標幺值。為了便于與電機動態數學模型結合,本文規定,定轉子繞組直軸合成磁動勢起增磁作用時為正。
求解等效磁路模型,可以得到永磁體的平均工作點為
(5)

在異步起動永磁同步電動機起動過程中,根據各時刻的定轉子繞組直軸合成磁動勢,利用磁路計算模型,可以計算對應時刻的永磁體平均工作點。
圖1 永磁電機的等效磁路模型Fig.1 Magnetic circuit of permanent magnet machine
1.3 定轉子直軸合成磁動勢的計算
從上述分析可以看出,利用異步起動永磁同步電動機的動態數學模型可以計算出各時刻的定轉子繞組直軸電流,而利用磁路模型計算永磁體平均工作點需要的是定轉子直軸合成磁動勢。因此,將電機的動態數學模型和磁路計算模型結合起來計算電機起動過程中永磁體平均工作點的關鍵是確定定轉子繞組直軸電流與定轉子繞組直軸合成磁動勢之間的關系。本文在多相繞組合成磁動勢計算公式的基礎上,推導了采用正交變換時,定轉子繞組直軸電流與定轉子繞組直軸合成磁動勢之間的關系式。
根據電機學基本原理,m相繞組的合成基波磁動勢幅值為
(6)
式中:N為繞組每相串聯匝數;kw1為基波磁動勢的繞組因數;Iφ為相電流的有效值。對應的直軸磁動勢為
(7)
式中θa為合成基波磁動勢與電機直軸之間的夾角。
由于電機的直軸電流可以表示為
Id=Icosθa。
(8)
式中I為電流綜合矢量的幅值。因此,式(7)可以變換為
(9)

(10)
在電機動態數學模型中,轉子側參數已經歸算到定子側;因此,利用動態數學模型得到的定轉子繞組的直軸電流可以計算定轉子繞組的直軸合成磁動勢
(11)
作用于永磁體的等效增(去)磁磁動勢為
Fd=Fd1Kad。
(12)
式中Kad為直軸電樞磁動勢折算系數。
1.4 起動過程中永磁體平均工作點計算模型的建立
利用上述定轉子繞組直軸電流與直軸合成磁動勢的關系式,通過將異步起動永磁同步電動機的動態數學模型和磁路計算模型結合,可以建立電機起動過程中永磁體平均工作點的解析計算模型,計算流程如圖2所示。首先利用動態數學模型計算的各時刻定轉子繞組直軸電流,由式(11)、式(12)計算出對應的等效增(去)磁磁動勢,然后利用磁路計算模型計算出對應時刻的永磁體平均工作點。
圖2 計算流程圖Fig.2 Flowchart of the established model
2 起動過程中永磁體平均工作點計算模型的仿真分析
2.1 仿真樣機的主要參數
本文在Matlab/SIMULINK中建立了異步起動永磁同步電動機起動過程中永磁體平均工作點的解析計算模型,以3臺異步起動永磁同步電動機為樣機,分別計算了電機起動過程中永磁體平均工作點的變化,并利用有限元法驗證了所建立模型的計算準確性。3臺樣機的主要設計參數和額定參數分別如表1~表6所示,其中,樣機的定轉子漏抗等參數是利用文獻[3]中的解析方法計算得到的。
表1 樣機一的主要設計參數Table 1 Design parameters of the first prototype motor
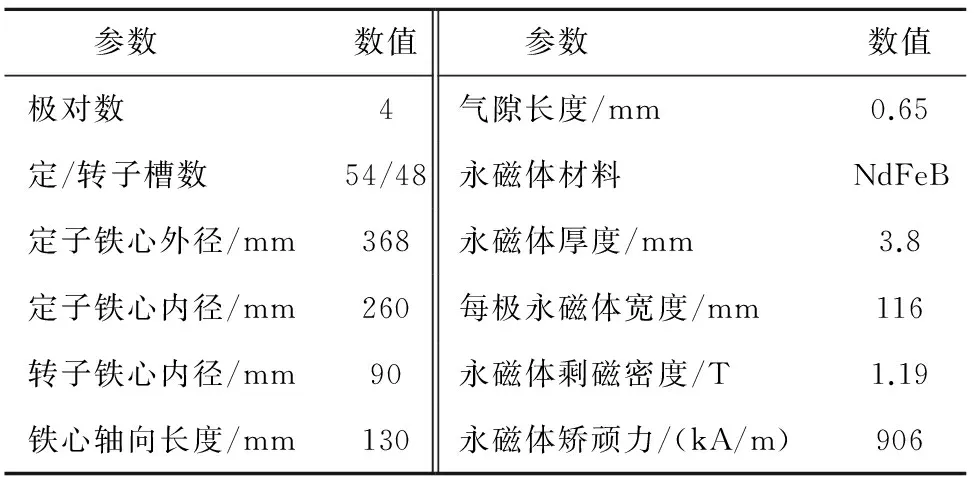
表2 樣機二的主要設計參數Table 2 Design parameters of the second prototype motor
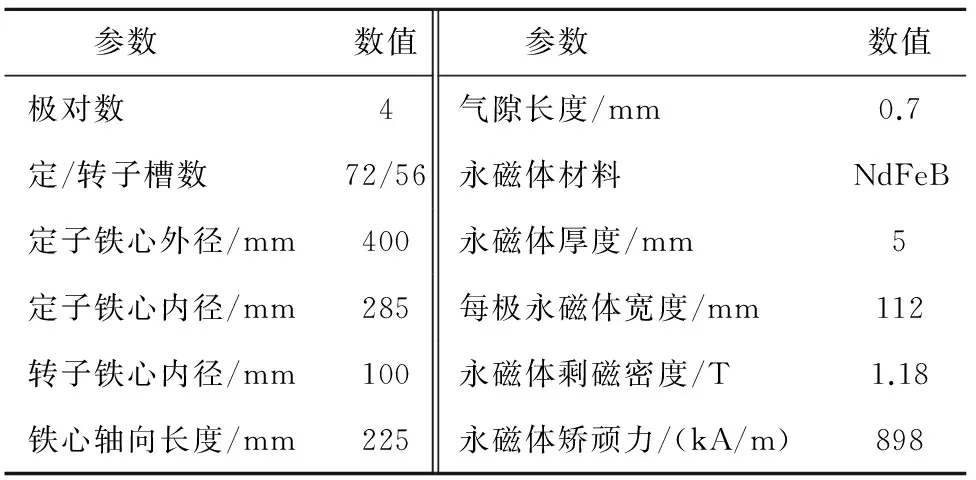
表3 樣機三的主要設計參數Table 3 Design parameters of the third prototype motor
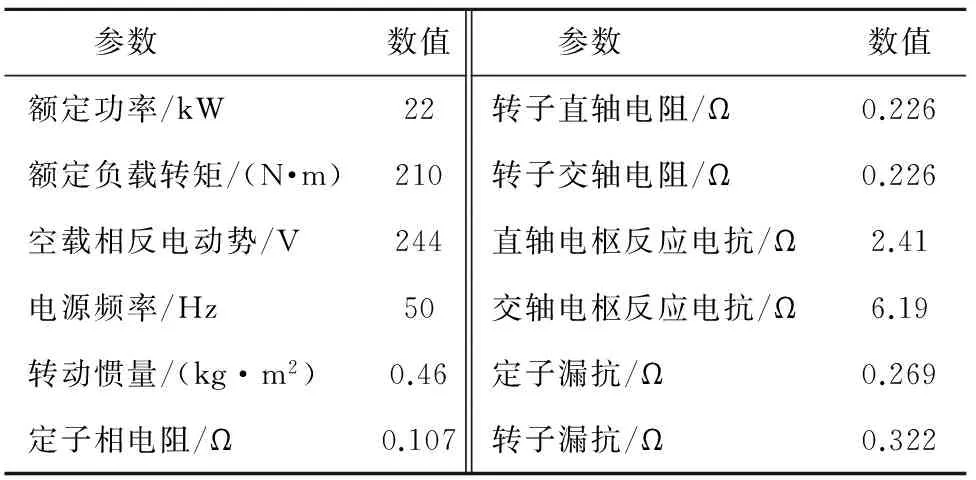
表4 樣機一的主要額定參數Table 4 Rated parameters of the first prototype motor
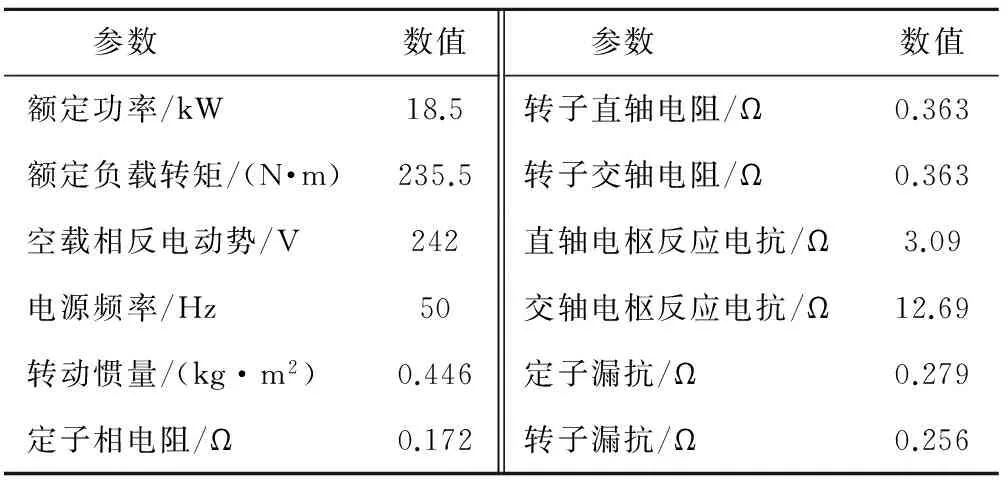
表5 樣機二的主要額定參數Table 5 Rated parameters of the second prototype motor
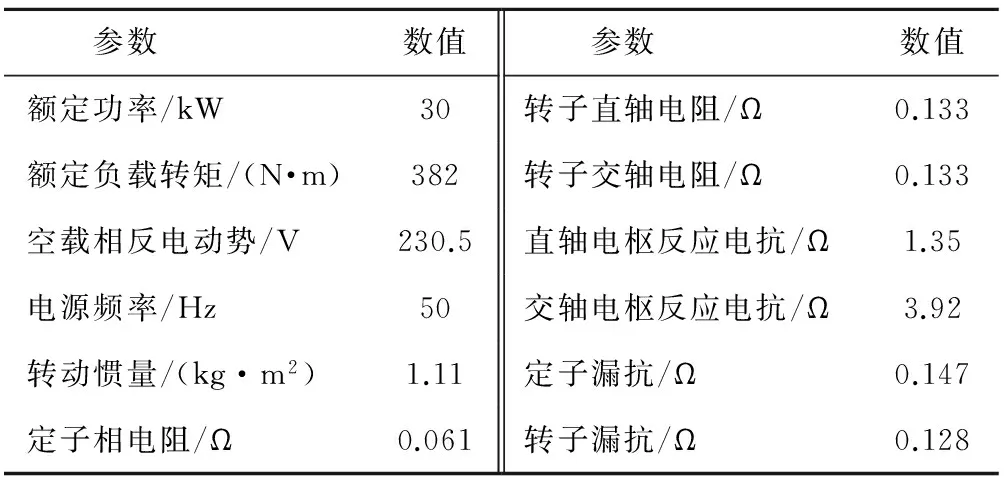
表6 樣機三的主要額定參數Table 6 Rated parameters of the third prototype motor
2.2 計算準確性驗證
2.2.1 永磁體最小平均工作點的計算
文獻[11]指出,在異步起動永磁同步電動機的起動過程中,永磁體的最大退磁磁場出現在電機轉速接近同步速時。
在Matlab/SIMULINK中,利用本文建立的模型計算電機起動過程中的永磁體最小平均工作點時,采取的方法是逐步增大電機的轉動慣量直至電機不能牽入同步。對于樣機一,計算得到的電機轉速曲線和永磁體平均工作點曲線如圖3所示。可以看出,隨著電機轉速的上升,永磁體平均工作點曲線不斷波動,退磁磁場強度不斷變化;由于電機的轉動慣量過大,電機未牽入同步。最終,電機轉速低于同步速小幅波動,永磁體的平均工作點曲線也隨著電機轉速的波動而波動,且波動幅值保持不變,最小值維持在0.13 T,對應的電機轉速為988 r/min,此時的永磁體退磁磁場強度達到最大值。在該狀態下,定轉子繞組合成磁動勢與永磁磁場軸線的相對位置周期性變化,二者之間的夾角可以是0~360°電角度之間的任意角度,因此可以找到永磁體的最小平均工作點。對于樣機一,利用本文建立的模型計算得到的永磁體最小平均工作點為0.13 T。
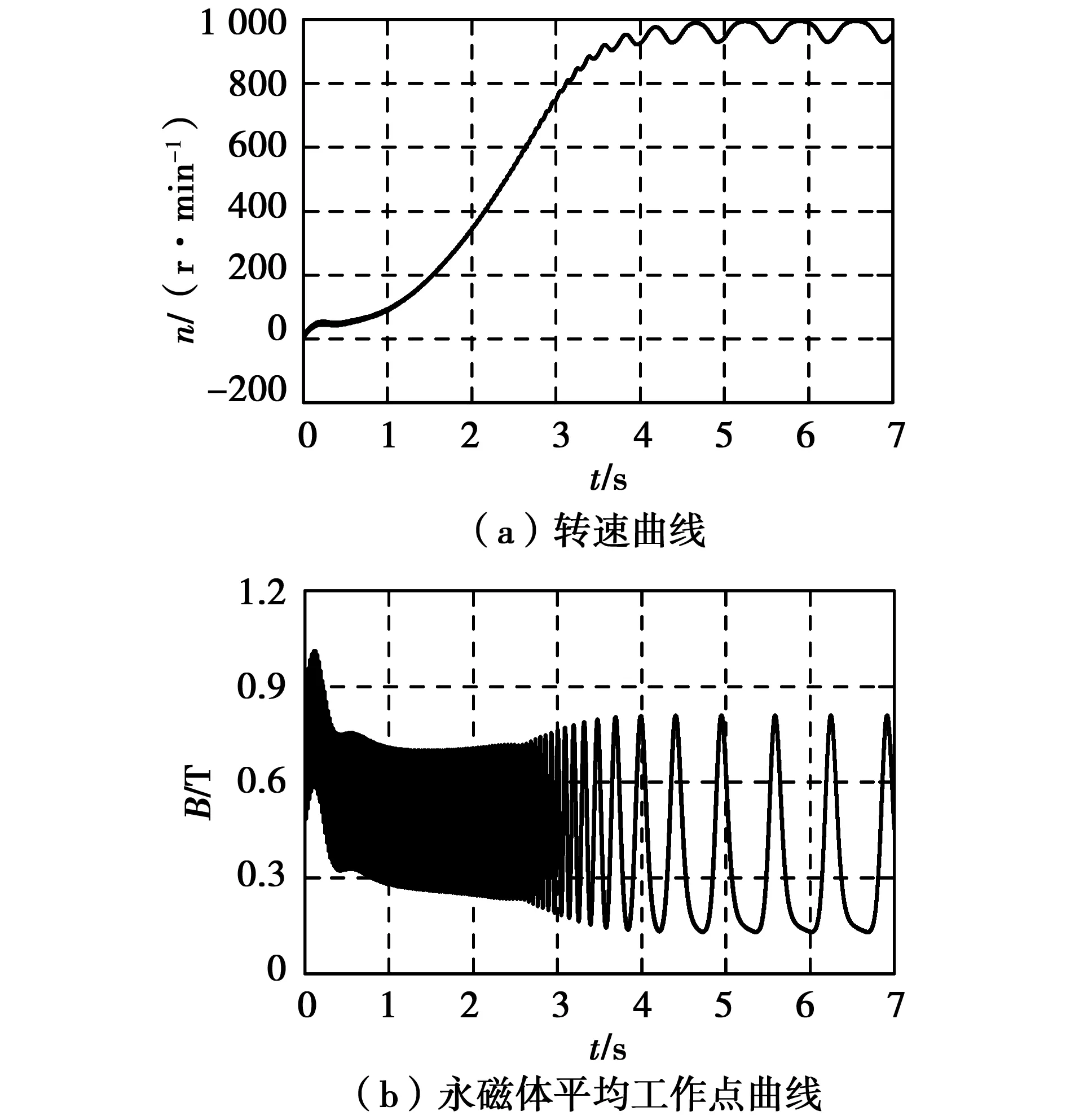
圖3 轉動慣量過大導致樣機一不能牽入同步時的轉速曲線與永磁體平均工作點曲線Fig.3 Speed and magnets′ average operating point curves during starting failure caused by large moment of inertia
在利用有限元法計算樣機起動過程中的永磁體最小平均工作點時,采取相似的方法,不斷增大電機的轉動慣量直至電機不能牽入同步,可以得到永磁體的最小平均工作點。對于樣機一,有限元法計算得到的永磁體最小平均工作點為0.11 T。
對于樣機二和樣機三,采用上述方法,利用本文建立的解析計算模型和有限元法可以分別計算其最小平均工作點。表7比較了利用本文建立的解析計算模型和有限元法計算得到的3臺樣機的最小平均工作點,可以看出,本文所建立的解析計算模型可以較準確地計算異步起動永磁同步電動機起動過程中的最小平均工作點。在電機設計階段,本文所建立的解析計算模型可用于校驗永磁體的最小平均工作點。
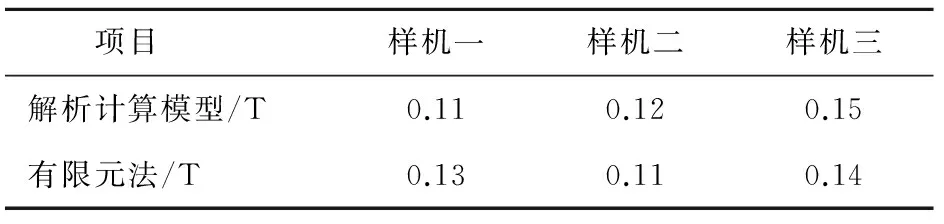
表7 樣機的最小平均工作點比較
2.2.2 穩態時永磁體平均工作點的計算
利用Matlab/SIMULINK中建立的模型計算得到了樣機一帶額定負載轉矩、以轉子本身轉動慣量起動時的轉速曲線和永磁體平均工作點曲線,如圖4所示。可以看出,隨著電機轉速的不斷升高,永磁體平均工作點曲線多次波動;在a點(0.067 s)處,永磁體的平均工作點曲線出現最小值(0.169 T),對應的電機轉速為505 r/min;電機牽入同步穩定運行后,永磁體的平均工作點維持在0.742 T。
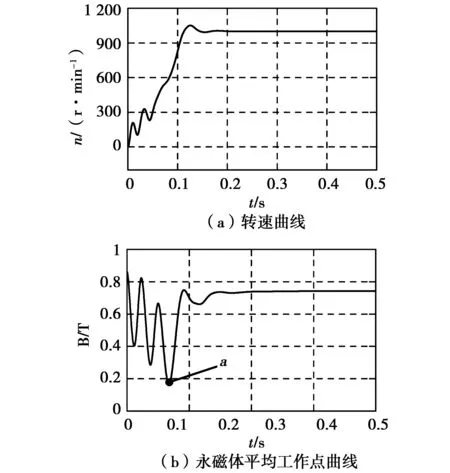
圖4 樣機一起動時的轉速曲線與永磁體平均工作點曲線Fig.4 Speed and magnets′ average operating point curves during starting process of the first prototype motor
利用本文建立的解析計算模型分別計算了3臺樣機帶不同負載轉矩起動至穩定運行后的永磁體平均工作點,并與有限元法的計算結果作比較,結果如圖5~圖7所示。可以看出,解析計算結果與有限元計算結果吻合較好,本文所建立的解析計算模型可以準確地計算異步起動永磁同步電動機穩定運行時的永磁體平均工作點。
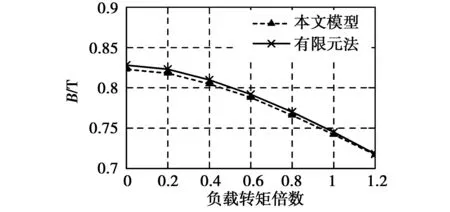
圖5 樣機一穩定運行時的永磁體平均工作點Fig.5 Magnets′ average operating points when the first prototype motor operates stably
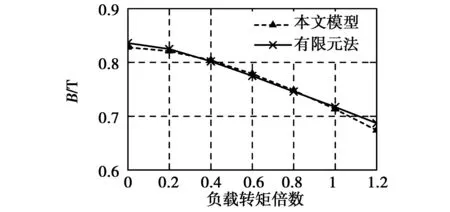
圖6 樣機二穩定運行時的永磁體平均工作點Fig.6 Magnets′ average operating points when the second prototype motor operates stably

圖7 樣機三穩定運行時的永磁體平均工作點Fig.7 Magnets′ average operating points when the third prototype motor operates stably
2 結 論
本文通過將異步起動永磁同步電動機的動態數學模型與磁路計算模型結合,建立了電機起動過程中永磁體平均工作點的解析計算模型,并通過與有限元法的計算結果作比較驗證了所建立模型的計算準確性。
結果表明,本文所建立的計算模型可以較準確地計算異步起動永磁同步電動機起動過程中的最小平均工作點和電機穩定運行時的永磁體平均工作點;該模型可為異步起動永磁同步電動機設計階段的快速計算提供參考。
[1] KIM T H,HONG J P.A study on the irreversible magnet demagnetization in single-phase line-start permanent magnet motor[J].Journal of Applied Physics,2009,105(7): 07F108-07F108-3.
[2] KANG G H,HUR J,NAM H,et al.Analysis of irreversible magnet demagnetization in line-start motors based on the finite-element method[J].IEEE Transactions on Magnetics,2003,39(3): 1488-1491.
[3] 王秀和,楊玉波,朱常青.異步起動永磁同步電動機-理論、設計與測試[M].北京: 機械工業出版社,2009: 1-6.
[4] HONG J,HYUN D,LEE S B,et al.Automated monitoring of magnet quality for permanent magnet synchronous motors at standstill[J].IEEE Transactions on Industry Applications,2010,46(4): 1397-1405.
[5] RIBA RUIZ J R,ROSERO J A,ESPINOSA A G,et al.Detection of demagnetization faults in permanent-magnet synchronous motors under non-stationary conditions[J].IEEE Transactions on Magnetics,2009,45(7): 2961-2969.
[6] URRESTY J C,ATASHKHOOEI R,RIBA J,et al.Shaft trajectory analysis in a partially demagnetized permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronics,2013,60 (8): 3454-3461.
[7] TORREGROSSA D,KHOOBROO A,FAHIMI B.Prediction of acoustic noise and torque pulsation in PM synchronous machines with static eccentricity and partial demagnetization using field reconstruction method[J].IEEE Transactions on Industrial Electronics,2012,59(2): 934-944.
[8] 盧偉甫,劉明基,羅應立,等.自起動永磁同步電機起動過程退磁磁場的計算與分析[J].中國電機工程學報,2011,31(15): 53-60. LU Weifu,LIU Mingji,LUO Yingli,et al.Demagnetization field analysis and calculation for line-start permanent magnet synchronous motor during start process[J].Proceedings of the CSEE,2011,31(15): 53-60.
[9] 盧偉甫,羅應立,趙海森.自起動永磁同步電機起動過程電樞反應退磁分析[J].電機與控制學報,2012,16(7): 29-33. LU Weifu,LUO Yingli,ZHAO Haisen.Armature reaction demagnetization analysis for line-start permanent magnet synchronous motor during start process[J].Proceedings of Electric Machines and Control,2012,16(7): 29-33.
[10] LU Weifu,LIU Mingji,LUO Yingli,et al.Influencing factors on the demagnetization of line-start permanent magnet synchronous motor during its starting process[C]//International Conference on Electrical Machines and Systems,August 20-23,2011,Beijing,China.2011: 1-4.
[11] 唐任遠.現代永磁電機[M].北京: 機械工業出版社,2011: 185-187.
[12] FAROOQ J,SRAIRI S,DJERDIR A,et al.Use of permeance network method in the demagnetization phenomenon modeling in a permanent magnet motor[J].IEEE Transactions on Magnetics,2006,42(4): 1295-1298.
[13] WANG J,WANG W,ATALLAH K,et al.Demagnetization assessment for three-phase tubular brushless permanent-magnet machines[J].IEEE Transactions on Magnetics,2006,44(9): 2195-2203.
[14] 李國建,王道涵,朱常青.基于MATLAB/ SIMULINK的三相異步起動永磁同步電動機的建模與仿真[J].山東大學學報(工學版),2006,36(5): 40-43. LI Guojian,WANG Daohan,ZHU Changqing.Modeling and simulation of three-phase line-start permanent magnet synchronous motor[J].Journal of Shandong University (Engineering Science),2006,36(5): 40-43.
[15] 劉仲恕.永磁同步電動機狀態方程研究和起動過程仿真[J].福建工程學院學報,2003,1(2): 43-46. LIU Zhongshu.On the synchronous motor state equation of permanent magnetism and emulation of starting course[J].Journal of Fujian University of Technology,2003,1(2): 43-46.
[16] WANG D H,WANG X H,CHEN H Y,et al.Matlab/Simulink-based simulation of line-start PMSM used in pump jacks[C]// IEEE Conference on Industrial Electronics and Applications,May 23-25,2007,Harbin,China.2007: 1179-1181.
[17] 王秀和,孫雨萍.電機學[M].北京: 機械工業出版社,2009: 322-334.
Analytical calculation of permanent magnets′ average operating point for line-start permanent magnet synchronous motor during starting process
TANG Xu1,2, WANG Xiu-he1, XU Ding-wang1
(1.School of Electrical Engineering,Shandong University,Jinan 250061,China;2.School of Automation Engineering,Qingdao Technological University,Qingdao 266520,China)
When finite element method (FEM) is adopted to study the variation of magnets′ operating point in line-start permanent magnet synchronous motor (LSPMSM) during the starting process,the computation is time consuming.Thus FEM is not suitable for the fast calculation at the motor design stage.To solve this problem,the analytical model to calculate the variation of magnets′ average operating point during the starting process of LSPMSM was established by combining the dynamic mathematical model and magnetic circuit model of LSPMSM.The variations of magnets′ average operating point during the starting process of three prototype motors were calculated by the above analytical model.And magnets’ average operating point when the severest demagnetization field during the starting process occurs as well as magnets’ average operating point when the motor operates stably were obtained.Accuracy of the analytical calculation model was validated by comparing with the result of FEM.Thus,the established analytical model can benefit fast design of LSPMSM.
line-start permanent magnet synchronous motor; dynamic mathematical model; magnetic circuit model; starting process; average operating point
2014-06-17
國家自然科學基金(51577107)
唐 旭(1988—),男,博士研究生,研究方向為永磁電機; 王秀和(1967—),男,博士,教授,博士生導師,研究方向為永磁電機; 徐定旺(1992—),男,碩士研究生,研究方向為永磁電機。
王秀和
10.15938/j.emc.2017.05.002
TM 351
A
1007-449X(2017)05-0008-07
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19