溫度對(duì)超聲波電動(dòng)機(jī)起動(dòng)階段位移分辨率的影響
2017-05-15 02:14:23黃偉彬羅敏峰
微特電機(jī) 2017年8期
關(guān)鍵詞:單片機(jī)
鄭 偉,黃偉彬,羅敏峰
(福建工程學(xué)院,福州350118)
0 引 言
超聲波電動(dòng)機(jī)是利用逆壓電效應(yīng)和摩擦作用將電能轉(zhuǎn)化為機(jī)械能,與傳統(tǒng)的電磁電機(jī)相比較,表現(xiàn)出重量輕、低轉(zhuǎn)速、輸出大力矩和定位精度高等特點(diǎn),在各種新興高科技領(lǐng)域呈現(xiàn)出良好的應(yīng)用前景[1-3],因此希望超聲波電動(dòng)機(jī)能有足夠的定位精度便于精確控制。由于超聲波電動(dòng)機(jī)中摩擦界面的性質(zhì)、壓電陶瓷的壓電性和定轉(zhuǎn)子結(jié)構(gòu)的動(dòng)力學(xué)特性都與溫度密切相關(guān),關(guān)于溫度對(duì)超聲波電動(dòng)機(jī)機(jī)械性能的影響受到廣泛關(guān)注[4-6]。事實(shí)上,在機(jī)械特性變化的同時(shí),定位精度也因位移分辨率的溫度敏感性而受到顯著影響。超聲波電動(dòng)機(jī)的定位精度高得益于斷電自鎖特性和良好的定子振幅可控性,使得位移分辨率可以達(dá)到很高的水平。理想條件(恒溫、隔振等)下,位移分辨率可達(dá)納米級(jí)甚至亞納米級(jí),對(duì)常溫下超聲波電動(dòng)機(jī)分辨率的控制方法的研究取得了長足進(jìn)步[7-10]。然而,由于壓電陶瓷本身存在溫升,超聲波電動(dòng)機(jī)運(yùn)行過程中定/轉(zhuǎn)子摩擦產(chǎn)生溫升,而高位移分辨率的實(shí)現(xiàn)依賴于起動(dòng)階段的溫度穩(wěn)定性,溫度對(duì)位移分辨率的影響成為超聲波電動(dòng)機(jī)高精度定位不可回避的問題。
本文通過對(duì)超聲波電動(dòng)機(jī)定子彈性體中壓電材料、摩擦材料等在不同溫度下進(jìn)行特性分析,剖析溫度對(duì)超聲波電動(dòng)機(jī)位移分辨率影響機(jī)理,通過試驗(yàn)驗(yàn)證影響機(jī)理,并通過前饋方法對(duì)單臺(tái)超聲波電動(dòng)機(jī)進(jìn)行控制,提高其分辨率的穩(wěn)定性。
1 溫度對(duì)超聲波電動(dòng)機(jī)分辨率影響分析
旋轉(zhuǎn)型行波超聲波電動(dòng)機(jī)主要由定子和壓電陶瓷組成的定子產(chǎn)生超聲振動(dòng),從而驅(qū)動(dòng)轉(zhuǎn)子。超聲波電動(dòng)機(jī)的驅(qū)動(dòng)元件為壓電陶瓷,定子金屬材料主要由銅基材料加工,在常溫下溫度變化對(duì)銅基材料性能的影響很小,而壓電陶瓷的溫度特性具有很強(qiáng)的非線性特性。
旋轉(zhuǎn)型行波超聲波電動(dòng)機(jī)的定子是由定子金屬體和壓電陶瓷組成,通過逆壓電效應(yīng)工作[11]。沿著極化方向在壓電陶瓷上施加激勵(lì)電壓V=V0sinωt,V0為電壓幅值。根據(jù)逆壓電效應(yīng),壓電陶瓷產(chǎn)生變形,該變形等效為基礎(chǔ)位移激振方式的交變變形,用于驅(qū)動(dòng)超聲波電動(dòng)機(jī)定子。因此壓電陶瓷的性能是超聲波電動(dòng)機(jī)定子振動(dòng)的重要影響因素之一。在超聲波電動(dòng)機(jī)的設(shè)計(jì)中,常用的壓電方程為第一類壓電方程[12]:

式中:ε為應(yīng)變;D是當(dāng)電場(chǎng)強(qiáng)度E為常數(shù)時(shí)的電位移強(qiáng)度彈性柔度常數(shù);σj為應(yīng)力;En為電場(chǎng)強(qiáng)度;d是壓電常數(shù);表示σ為常數(shù)時(shí)的介電常數(shù)。式(1)是應(yīng)用在不考慮溫度影響下的情況,壓電常數(shù)dni與環(huán)境溫度成線性關(guān)系。
通過對(duì)壓電陶瓷在不同的溫度環(huán)境下試驗(yàn)[12],根據(jù)超聲波電動(dòng)機(jī)用壓電陶瓷的特點(diǎn),對(duì)常溫環(huán)境下的壓電方程進(jìn)行修正。考慮溫度對(duì)壓電陶瓷的影響,得到的壓電方程:
式中:d是壓電常數(shù);ΔT為溫度變化量,d-為含溫度影響的壓電常數(shù);是熱膨脹系數(shù);e-為含溫度影響的介電系數(shù)恒定應(yīng)力下的熱電系數(shù)。
與式(1)相比較,式(2)中考慮了環(huán)境溫度變化對(duì)壓電常數(shù)的影響以及壓電陶瓷在不同溫度環(huán)境下熱膨脹和熱釋電等因素。
與溫度相關(guān)的物理量α與溫度的函數(shù)關(guān)系可展開級(jí)數(shù)[13],即:

式中:α0為α(物理量)在參考溫度T0時(shí)的值;和分別表示α(物理量)在參考溫度T0時(shí)的一級(jí)、二級(jí)和三級(jí)溫度系數(shù),它們的定義:因此,α在溫度T時(shí)的溫度系數(shù)Tα的表達(dá)式:

溫度系數(shù)物理意義:在某溫度下,當(dāng)溫度每變化1℃時(shí),α所產(chǎn)生的相對(duì)變化。從式(3)~式(5)看出,式(2)只考慮了一級(jí)溫度系數(shù)[12],該式能較好地反映壓電陶瓷在不同溫度環(huán)境下的性能變化。文獻(xiàn)[14]對(duì)超聲波電動(dòng)機(jī)用壓電陶瓷的壓電常數(shù)d33在不同環(huán)境溫度下進(jìn)行測(cè)量,其試驗(yàn)結(jié)果如圖1所示。從圖1中可以看出,在常溫15℃ ~35℃的范圍內(nèi),壓電常數(shù)依然有小的波動(dòng)。
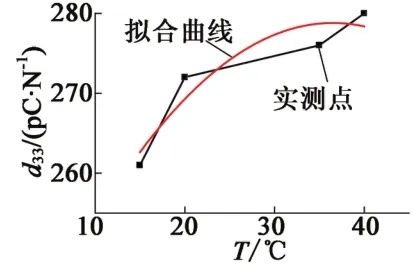
圖1 不同溫度下壓電常數(shù)變化
在文獻(xiàn)[14]中,對(duì)該數(shù)據(jù)進(jìn)行線性化處理,其壓電方程如下:
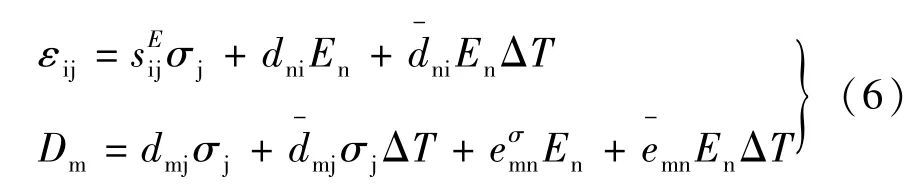
本文研究的溫度范圍在5℃~40℃的范圍內(nèi),用比較接近試驗(yàn)數(shù)據(jù)的方程來描述,其中d-為考慮了溫度因素的壓電應(yīng)變常數(shù);其值為隨著溫度變化的值,因此將式(6)中修正:

式中:A為在標(biāo)準(zhǔn)測(cè)試溫度下壓電陶瓷壓電常數(shù)。修正后的壓電方程是否符合實(shí)際情況,需要通過對(duì)超聲波電動(dòng)機(jī)在不同本體溫度下試驗(yàn)進(jìn)行驗(yàn)證。本試驗(yàn)不涉及控制,只測(cè)試常態(tài)下溫度對(duì)超聲波電動(dòng)機(jī)本體分辨率的影響。
2 試驗(yàn)設(shè)計(jì)
通過上節(jié)分析了溫度對(duì)超聲波電動(dòng)機(jī)位移分辨率的影響因素,本節(jié)通過試驗(yàn)對(duì)其進(jìn)行驗(yàn)證。
2.1 超聲波電動(dòng)機(jī)位移分辨率試驗(yàn)組成
本試驗(yàn)系統(tǒng)如圖2所示,通過電機(jī)軸的反光,反算出電機(jī)轉(zhuǎn)過的角度[7]。
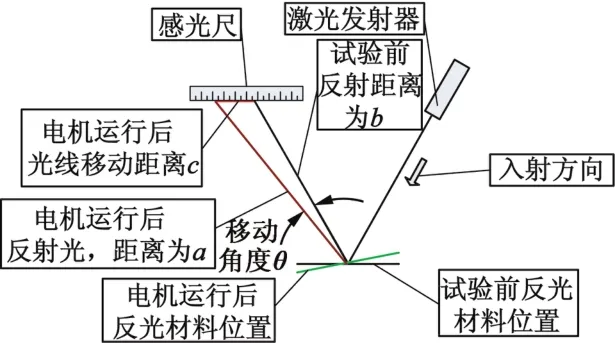
圖2 超聲波電動(dòng)機(jī)位移分辨率試驗(yàn)系統(tǒng)

2.2 試驗(yàn)設(shè)計(jì)
本試驗(yàn)使用TRUM-60旋轉(zhuǎn)型行波超聲波電動(dòng)機(jī)作為試驗(yàn)對(duì)象,單片機(jī)控制位移(型號(hào)為STC89-C52RC),單片機(jī)的P1.0為電機(jī)驅(qū)動(dòng)器的啟停控制,射激光光線到尺上,通過單片機(jī)控制超聲波電動(dòng)機(jī)運(yùn)動(dòng),超聲波電動(dòng)機(jī)運(yùn)動(dòng)根據(jù)余弦定理:P1.1為正反轉(zhuǎn)控制口。P1.0通過控制超聲波電動(dòng)機(jī)起動(dòng)來實(shí)現(xiàn)超聲波電動(dòng)機(jī)運(yùn)行的時(shí)間,該方法的實(shí)現(xiàn)是通過定時(shí)器T0中斷實(shí)現(xiàn)的。
由于超聲波電動(dòng)機(jī)是通過摩擦傳遞運(yùn)動(dòng)和力,因此超聲波電動(dòng)機(jī)從開始運(yùn)行起,本體就開始發(fā)熱,直到其本體發(fā)熱與環(huán)境達(dá)到熱平衡后,本體溫度才穩(wěn)定下來不再變化。本試驗(yàn)用TRUM60型超聲波電動(dòng)機(jī)作為試驗(yàn)對(duì)象,從運(yùn)行開始到與環(huán)境達(dá)到熱平衡為試驗(yàn)時(shí)間,因此,對(duì)本試驗(yàn)首先在室溫下,測(cè)量超聲波電動(dòng)機(jī)位置分辨率,然后將其空載運(yùn)行固定間隔時(shí)間后,再測(cè)試超聲波電動(dòng)機(jī)的溫度和位置分辨率,以觀察變化規(guī)律。
3 試驗(yàn)結(jié)果及分析
3.1 試驗(yàn)過程及結(jié)果
根據(jù)2.2中的試驗(yàn)設(shè)計(jì),搭建試驗(yàn)系統(tǒng),其試驗(yàn)系統(tǒng)如圖3所示。
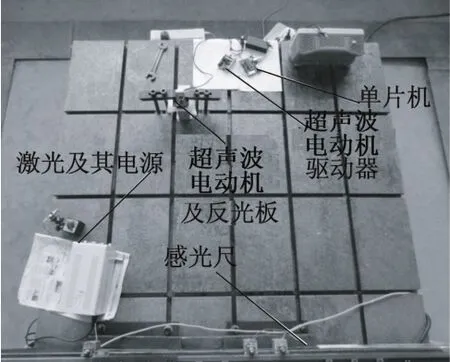
圖3 位移分辨率試驗(yàn)
在不同的超聲波電動(dòng)機(jī)本體溫度下,通過單片機(jī)程序,對(duì)P1.0口輸出,確定控制驅(qū)動(dòng)器驅(qū)動(dòng)超聲波電動(dòng)機(jī)運(yùn)行時(shí)間,測(cè)量超聲波電動(dòng)機(jī)轉(zhuǎn)過的角度,從而得到不同本體溫度下超聲波電動(dòng)機(jī)的位移分辨率。
在常溫下,將冷態(tài)的超聲波電動(dòng)機(jī)驅(qū)動(dòng)器通過單片機(jī)控制超聲波電動(dòng)機(jī)運(yùn)行100 μs,并通過式(6)計(jì)算平均值及轉(zhuǎn)動(dòng)角度誤差,在超聲波電動(dòng)機(jī)運(yùn)行10 min后,測(cè)量超聲波電動(dòng)機(jī)本體溫度后,繼續(xù)測(cè)試分辨率,如此重復(fù)。
該試驗(yàn)樣本TRUM60參數(shù):定子直徑60 mm,驅(qū)動(dòng)頻率40kHz,額定轉(zhuǎn)速120r/min,額定扭矩0.5 N·m,額定輸出功率6 W,最大扭矩1.6 N·m,最大轉(zhuǎn)速150 r/min。試驗(yàn)分兩次完成,其室內(nèi)環(huán)境溫度分別為16℃和24℃,每15次測(cè)量作為一組數(shù)據(jù),測(cè)試完成后,電機(jī)連續(xù)運(yùn)行10 min后,繼續(xù)測(cè)試15次為一組,直到電機(jī)的溫度與外界環(huán)境溫度達(dá)到熱平衡。取典型數(shù)據(jù)進(jìn)行分析,如圖4所示,電機(jī)的表面溫度依次為16.3℃,18.8℃,24.3℃,27.0℃,31.2℃,34.9℃(隨后測(cè)量表面溫度在34.3℃ ~35.4℃這個(gè)區(qū)間變化)。其中,測(cè)試點(diǎn)18.8℃的具體意義是在室溫為16℃時(shí),電機(jī)從16.3℃開始運(yùn)行,當(dāng)表面溫度達(dá)到25.5℃后,在室溫中降溫到18.8℃后測(cè)試。
將該數(shù)據(jù)代入式(7)中,a=1.01×10-2,b1=-3.8×10-4,b2=1.2×10-5。 在該組數(shù)據(jù)中,可以簡(jiǎn)化為一階。為了驗(yàn)證該趨勢(shì)與壓電元件在不同溫度下性能變化,進(jìn)行如下試驗(yàn)驗(yàn)證。

圖4 不同溫度下超聲波電動(dòng)機(jī)分辨率
3.2 試驗(yàn)驗(yàn)證
本控制方法是應(yīng)用上節(jié)得到的壓電陶瓷受溫度影響得到的結(jié)論,為了驗(yàn)證起動(dòng)階段超聲波電動(dòng)機(jī)分辨率變化主要由壓電陶瓷影響而產(chǎn)生的,利用試驗(yàn)得到式(6)中的修正數(shù)據(jù)。結(jié)合控制用單片機(jī),通過軟件設(shè)定輸出不同時(shí)間長度,該時(shí)間長度是通過修正后的式(6)計(jì)算所得,用于補(bǔ)償超聲波電動(dòng)機(jī)起動(dòng)階段的分辨率。將單片機(jī)的控制輸出端接入驅(qū)動(dòng)器,將單片機(jī)的P1.0口作為控制口,單片機(jī)硬件如圖5所示。
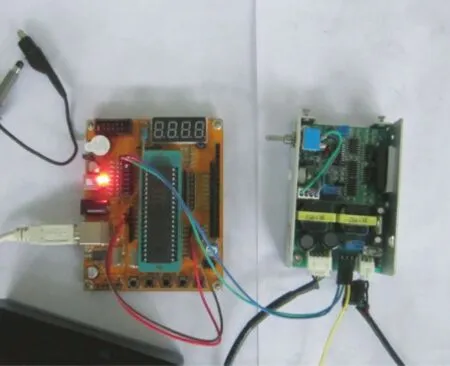
圖5 超聲波電動(dòng)機(jī)分辨率控制裝置
針對(duì)本次試驗(yàn)用超聲波電動(dòng)機(jī),超聲波電動(dòng)機(jī)用試驗(yàn)中得到的數(shù)據(jù)代入式(7)中進(jìn)行控制,由于16℃ ~24.3℃階段角度變化小(0.000 2°),因此只取從24.3℃開始驗(yàn)證。超聲波電動(dòng)機(jī)在室溫下,P1.0口的輸出脈沖寬度分別為130 μs持續(xù)10 min,120 μs持續(xù) 10 min,110 μs 持續(xù) 10 min,105 μs 正常工作,測(cè)量分辨率,并根據(jù)測(cè)量結(jié)果修正P1.0口輸出脈沖寬度的時(shí)間,最終調(diào)整的時(shí)間脈沖寬度為143 μs,121 μs,109 μs,102 μs,最終超聲波電動(dòng)機(jī)的分辨率如圖6所示。
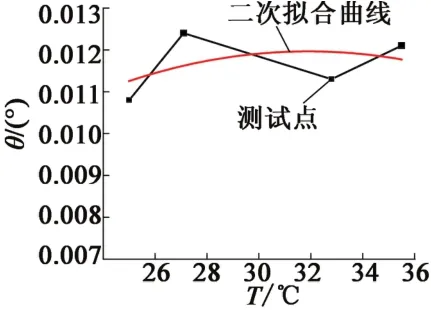
圖6 應(yīng)用前饋控制后不同溫度下超聲波電動(dòng)機(jī)分辨率
圖6中采用與圖4同比例顯示,可以看出通過補(bǔ)償壓電陶瓷性能的變化,可以有效降低波動(dòng)誤差。但是同時(shí)也降低了超聲波電動(dòng)機(jī)的分辨率,從0.007°變化到0.012°,而且是針對(duì)本試驗(yàn)超聲波電動(dòng)機(jī),由于超聲波電動(dòng)機(jī)的制造工藝和原材料很難保證完全一致,因此應(yīng)用式(6)可以對(duì)超聲波電動(dòng)機(jī)分辨率的穩(wěn)定性進(jìn)行驗(yàn)證,但是其參數(shù)不具有通用性。從本文所提及的超聲波電動(dòng)機(jī)可以看出,壓電陶瓷是影響其分辨率的重要因素之一,如要進(jìn)一步量化,需要對(duì)壓電陶瓷、粘貼工藝在不同溫度下性能變化結(jié)合起來進(jìn)行研究。
4 結(jié) 語
從溫度與壓電陶瓷性能關(guān)系的角度,對(duì)超聲波電動(dòng)機(jī)位移分辨率與溫度的關(guān)系進(jìn)行分析,并進(jìn)行試驗(yàn),從試驗(yàn)結(jié)果可以得到:(1)當(dāng)需要精密驅(qū)動(dòng)的情況下,超聲波電動(dòng)機(jī)本身運(yùn)行時(shí)產(chǎn)生的溫度變化影響超聲波電動(dòng)機(jī)的分辨率;(2)溫度對(duì)壓電陶瓷的影響能夠反映到超聲波電動(dòng)機(jī)位移分辨率上;(3)在超聲波電動(dòng)機(jī)的起動(dòng)階段,如需改善分辨率,可以從考慮提高壓電陶瓷的溫度穩(wěn)定性方面進(jìn)行設(shè)計(jì)。
參考文獻(xiàn)
[1] 趙淳生.世界超聲波電動(dòng)機(jī)技術(shù)的新進(jìn)展[J].振動(dòng)測(cè)試與診斷,2004,24(1):1-5.
[2] 蘆小龍,張建輝,趙淳生.行波型旋轉(zhuǎn)超聲波電動(dòng)機(jī)溫度場(chǎng)分析方法[J].中國電機(jī)工程學(xué)報(bào),2011,31(18):33-39.
[3] 潘松,菅磊,黃衛(wèi)清.超聲波電動(dòng)機(jī)直驅(qū)的電動(dòng)物鏡控制方法[J].振動(dòng):測(cè)試與診斷,2016,36(4):796-800.
[4] 郭超,楊明,李世陽.基于溫度反饋的超聲波電動(dòng)機(jī)速度控制系統(tǒng)[J].微特電機(jī),2012,40(5):62-64.
[5] 王光慶,郭吉豐.行波型超聲波電機(jī)的溫度特性[J].中國電機(jī)工程學(xué)報(bào),2008,28(9):98-104.
[6] 蘆小龍,張建輝,趙淳生.行波型旋轉(zhuǎn)超聲波電動(dòng)機(jī)溫度場(chǎng)分析方法[J].中國電機(jī)工程學(xué)報(bào),2011,31(18):33-39.
[7] 蘇民偉,羅敏峰,鄭偉.超聲波電動(dòng)機(jī)位移分辨率特性研究[J].組合機(jī)床與自動(dòng)化加工技術(shù),2016(2):9-12.
[8] XIE Yangqiu,TAN Yonghong,DONG Ruili.Nonlinear modeling and decoupling control of XY micropositioning stages with piezoelectric actuators[J].Mechatronics,IEEE/ASME Transactions,2013,18(3):821-832.
[9] 蘆小龍.用于空間環(huán)境的超聲波電動(dòng)機(jī)的研究[D].南京:南京航空航天大學(xué),2014.
[10] 阮玉鎮(zhèn),鄭偉.旋轉(zhuǎn)型行波超聲波電動(dòng)機(jī)磨損控制研究[J].微特電機(jī),2015(1):43-45.
[11] 趙淳生.超聲電機(jī)技術(shù)與應(yīng)用[M].北京:科學(xué)出版社,2010.
[12] WANG D,FOTINICH Y,CARMAN G P.Influence of temperature on the electromechanical and fatigue behavior of piezoelectric ceramics[J].Journal of Applied Physics.1998,83(10):5342-5350.
[13] 張沛霖,張仲淵.壓電測(cè)量[M].北京:國防工業(yè)出版社,1983.
[14] 鄭偉,趙淳生.低溫環(huán)境下超聲波電動(dòng)機(jī)定子特性[J].南京航空航天大學(xué)學(xué)報(bào),2009,41(1):1-5.
[15] 鄭偉.超聲波電動(dòng)機(jī)壽命及溫度適應(yīng)性研究[D].南京:南京航空航天大學(xué),2008.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36