改進型永磁同步電機模型預測控制方法
2017-05-15 02:14:34劉云飛姚明林
微特電機 2017年8期
關鍵詞:模型
劉云飛,李 兵,姚明林
(1.華北理工大學,唐山063210;2.唐山學院,唐山063000)
0 引 言
當前,直接轉矩控制(以下簡稱DTC)是一種流行的方法,應用于高性能永磁同步電機驅動。這種控制方法主要的優勢是結構簡單、響應迅速,但是缺點也很明顯,如轉矩脈動大等。DTC結構框圖如圖1所示。針對以上問題,許多學者進行了改進,如模糊控制結合DTC[1-3],神經網絡結合DTC[4],空間矢量調制的直接轉矩控制[5],模型預測控制(以下簡稱MPC)[6-7]等。
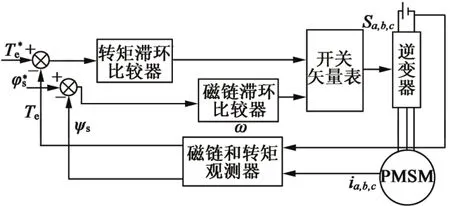
圖1 永磁同步電機DTC結構框圖
MPC算法是在控制對象離散空間狀態方程基礎上實現的,以磁鏈和轉矩為控制變量,同時引入價值函數和權重系數。將二者結合起來,形成模型預測直接轉矩控制方法(以下簡稱MPDTC)可以有效地減少轉矩脈動。但是在實際應用中需要大量的實驗來調整權重系數,過程較為繁復,不易實現。因此本文提出一種無需權重系數的改進型模型預測控制方法,該方法可以有效地減少磁鏈和轉矩脈動。對本文進行了仿真驗證,和傳統DTC進行了比較,實驗結果表明本文提出的這種方法各方面性能優于傳統DTC。
1 永磁同步電機數學模型
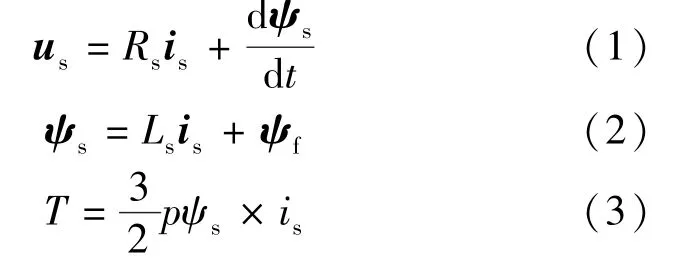
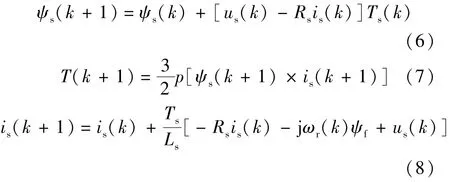
永磁同步電機電壓,磁鏈和轉矩方程如下:
其狀態方程:
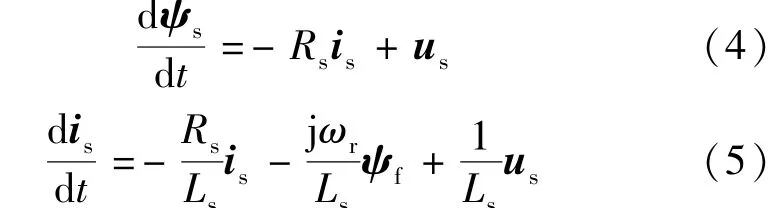
式中:us為定子電壓矢量;ψs為定子磁鏈矢量;Te是電磁轉矩;ψs,isα,usα,分別為定子磁鏈,電流和電壓;ωr為轉子角速度;p為極對數;ψf為永磁體磁鏈。
根據前向歐拉離散法,可得電機的預測表達式如下:
2 改進型MPC原理
模型預測控制的典型特點是滾動時域控制,根據每一采樣時刻獲得的信息和歷史信息,對未來時刻的信息進行預測,最終以期望值為目標求最優解。所以相對于傳統控制方式來說,模型預測控制更為精確有效。
其基本思路:使用模型來預測變量在時間段內的變化,利用代價函數表示期望,通過最小化代價函數來確定最優操作方式。但是其中存在一個問題,如果變量不同,則代價函數的每一項前面都要加上一個權重系數,來調節該項與其他控制目標的權重關系。但是目前沒有合適的理論或數值方法能夠調整此類參數,參數的設定均需依靠實驗過程,故而比較繁雜。對此,本文提出一種無需權重系數的一種模型預測方法來解決該問題,結構框圖如圖2所示。
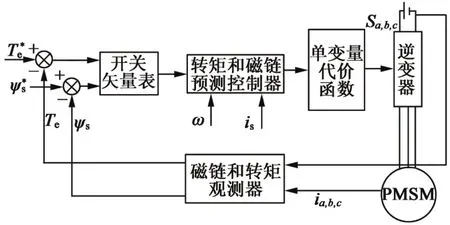
圖2 永磁同步電機改進型模型預測控制結構框圖
本文采用以下的代價函數來實現系統控制:

式中:i是從1到7,表示兩電平逆變器零狀態后的7個狀態;Tsref和ψsref是轉矩參考值和磁鏈參考值;gi是第i次電壓矢量在下一個采樣時刻的代價函數。權重系數λ0可以定義為額定轉矩和定子磁鏈幅值之比:

將代價函數轉變為只含轉矩變量的函數。最終,使代價函數最小化之后,在下一個采樣時刻k+1時刻控制器選擇合適的電壓矢量通過逆變器作用到電機上。
傳統DTC由于電壓矢量數量的限制(兩電平逆變器只有7個電壓矢量)而造成較大的轉矩和電流脈動。為了減小脈動,則必須增加采樣頻率,采樣頻率的增加,導致逆變器開關頻率增加,從而增大開關損耗和影響控制效果。本文提出一種DTC和MPC結合的控制方法來減小轉矩脈動,當估計的轉矩等于給定值時,有效電壓矢量能夠補償磁鏈誤差,其作用類似于傳統DTC里面的零矢量。
在下一個狀態中,將Vn分割成n部分,每一部分是為了簡化,將有效電壓矢量Vn分割成部分,每一個都與Vn有著相同的方向但是不同的長度。然后,由式(6)~式(8)磁鏈和轉矩預測出的新的有效電壓矢量來補償磁鏈誤差。如圖3所示,若定子磁鏈矢量落在第2區域(兩虛線之間的區域),如果磁鏈值和轉矩值小于給定值,則開關表中將選擇V3來增大磁鏈和轉矩值,使其靠近給定值。該方法能夠減小轉矩脈動以及將定子磁鏈維持在限制范圍內。由于有效電壓矢量Vn有合適的方向來補償磁鏈誤差,且代價函數中的磁鏈變量作為約束,因此單變量(轉矩)的代價函數能滿足控制要求。
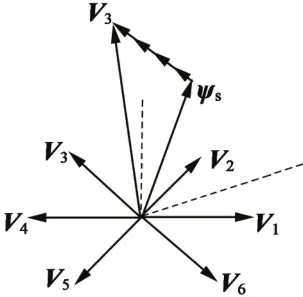
圖3 有效電壓矢量圖
當時,當在k+1個采樣周期選擇使代價函數最小的電壓矢量施加在逆變器上。
代價函數可表示:

3 仿真驗證
電機參數選取:Rs=17.6 Ω,ψr=0.172 Wb,Ld=Lq=8.5 mH,J=0.000 2 kg·m2,p=2。仿真時長為0.5 s,磁鏈給定值為0.8 Wb,直流電壓Vdc=220 V,轉速為70 rad/s,負載轉矩初值為0,自0.05 s時突變至2 N·m。轉矩突變,轉矩脈動很大,因此需要進一步的改進,如圖4所示。
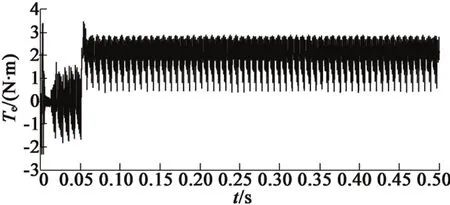
圖4 DTC轉矩響應曲線
轉矩突變時,轉速降低,又迅速回到給定值,動態響應快,但脈動大,如圖5所示。
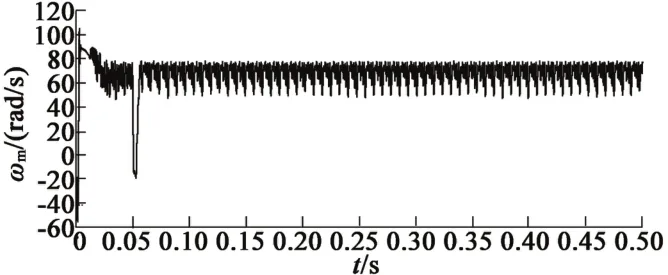
圖5 DTC轉速響應曲線
定子磁鏈如圖6所示。
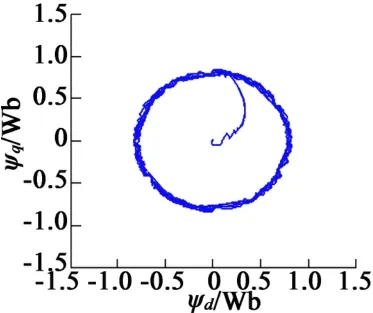
圖6 DTC定子磁鏈軌跡
在改進型模型預測控制作用下,轉矩和轉速脈動明顯減小,如圖7~圖9所示。
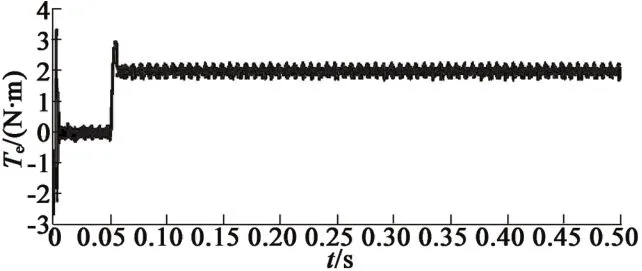
圖7 改進型MPDTC轉矩響應曲線

圖8 改進型MPDTC轉速響應曲線
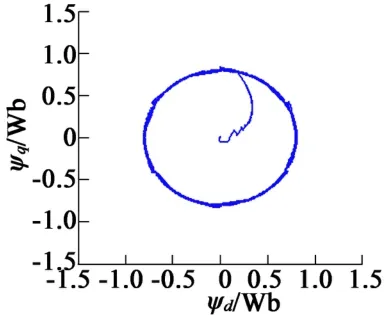
圖9 改進型MPDTC定子磁鏈軌跡
通過上述仿真可以看出,與傳統DTC控制系統相比,采用本文的改進型模型預測控制方法的控制系統轉矩脈動低,其磁鏈軌跡更為平滑,系統性能明顯優于傳統DTC控制系統。
4 結 語
本文介紹了一種改進型模型預測控制的方法,通過簡化代價函數的變量,從而達到更好的控制效果,且通過合理的分割有效電壓矢量,補償了磁鏈誤差,實現了減小轉矩和磁鏈脈動。仿真結果表明,該控制方法轉矩脈動低,其磁鏈軌跡更為平滑,證明了該控制策略的有效性。
參考文獻
[1] 高雅,劉衛國,駱光照.基于模糊控制的永磁同步電動機直接轉矩控制系統[J].微特電機,2008,36(1):40-42,60.
[2] 白華煜,劉軍,楚小剛.基于模糊控制永磁同步電機直接轉矩控制研究[J].電氣傳動,2005,43(7):6-9.
[3] 嚴衛生,林海,丁明,等.基于模糊邏輯控制的永磁同步電動機SVM-DTC系統仿真[J].微特電機,2008,36(11):35-38.
[4] 劉國海,戴先中.直接轉矩控制系統的神經網絡控制[J].電工技術學報,2001,16(6):13-17.
[5] 張華強,王新生,魏鵬飛,等.基于空間矢量調制的直接轉矩控制算法研究[J].電機與控制學報,2012,16(6):13-18.
[6] 王艷霞.基于模型預測的永磁同步電機直接轉矩控制及負載角限制[J].微特電機,2016,44(8):126-130.
[7] 武志濤,徐建英,谷偉志.基于模型預測的永磁同步電機直接轉矩最優控制器設計[J].微特電機,2016,44(3):49-53.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19