開關磁阻電機制動無反轉研究
2017-05-15 02:14:32黃向慧王永旺
微特電機 2017年8期
關鍵詞:控制策略
黃向慧,王永旺,程 勇
(西安科技大學,西安710054)
0 引 言
開關磁阻電機驅動系統作為一種新型的復雜機電一體化裝置,已經成為交流電機和直流電機驅動系統的強有力競爭者。它不僅具有交、直流驅動系統的優點,而且成本低,結構簡單,系統效率高,可靠性好且有較強的再生制動能力,即使在一相或兩相的情況下仍然可以進行電動和制動運行。根據開關磁阻電機的工作原理可知,在電機相繞組電感的下降階段,導通開關管就會產生制動轉矩,從而使電機停下來;由于制動過程中電機按照反轉邏輯通電,如果轉速變為零后沒有及時關斷相應的開關管,電機就可能會按相反的方向運行。為了避免這種情況的發生,在電機制動過程中,高速時可以先給三相繞組通電,使電機轉速快速降低,低速時給一相或兩相繞組通電,進而使電機可靠無反轉地停下來。
1 開關磁阻電機制動基本理論分析
根據能量平衡原理,忽略鐵耗有[3]:

式中:Wmec為輸入的機械能;Wm為磁場儲能;We為輸出的電能,且由于Wm=Wm(i,θ)和ψ=ψ(i,θ),則有:

進一步計算得出:

式中:Tem為電磁轉矩為磁共能;i為相電流;θ為定轉子相對位置角;L為相電感。所以電磁轉矩的表達式:

開關磁阻電機電壓均衡方程:

式中:ω為電機轉速。
上述方程可以寫成電流斜率的表達式,其中相電壓U取負值:

由圖1可以看出,由于電感位置不同,相電流波形可以歸納為以下5個階段:
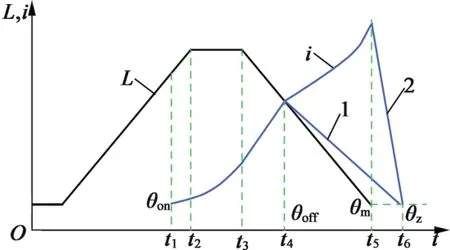
圖1 開關磁阻電機制動相電流分析圖
(1)t1~t2階段:由于t1時刻對應的電感值較大,所以相電流上升,產生電動轉矩,吸收的能量一部分為繞組儲能,一部分為機械能輸出。
(2)t~t階段:在t時刻相電感達到最大2320,不產生轉矩,相電流繼續上升。吸收的能量轉化成繞組儲能。
(3)t~t階段:在t時刻相電感開始下降3430,開始產生制動轉矩,由于因此相電流上升,吸收的機械能轉化為繞組儲能。
(4)t4~t5階段:在t4時刻相電感繼續下降,產生制動轉矩。相電流這時要分開討論:若ω較大,將大于零,相電流繼續上升;若ω較小將小于零,相電流將沿曲線1快速下降。吸收的機械能回饋電能。
(5)t5~t6階段:在t5時刻相電感已經降為最小,故不在產生轉矩。相電流沿曲線2迅速下降,繞組儲能回饋電能。
綜上所述,電機制動時相電流表達式:
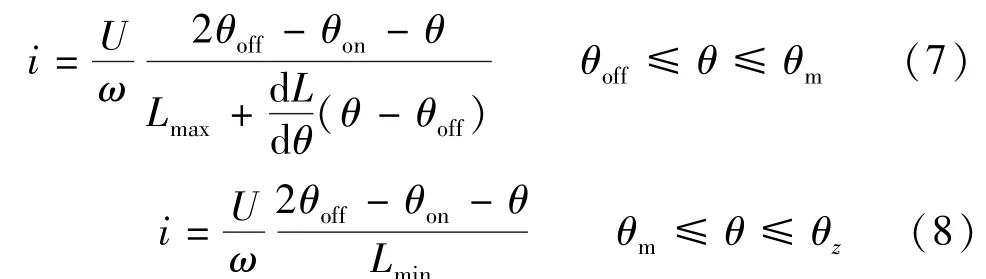
式中:θon為開通角;θoff為關斷角;θm為電流峰值對應的轉子位置角;θz為電流降為零對應的轉子位置角;Lmax和Lmin分別為相繞組電感的最大值和最小值。所以,由一相電流充電引起的母線電壓升高量[2]:

由三相電流充電引起的母線電壓升高量:
2 開關磁阻電機制動無反轉控制策略
根據位置傳感器的信號輸出,三相電感變化與轉子位置的關系曲線如圖2所示[4]。其中,轉子有8個凸極,定子有12個凸極,轉子凸極18°,定子凸極15°,一個信號周期為45°,每轉24個步距,步進角是15°。其中,LA,LB和LC為開關磁阻電機的三相電感變化曲線。
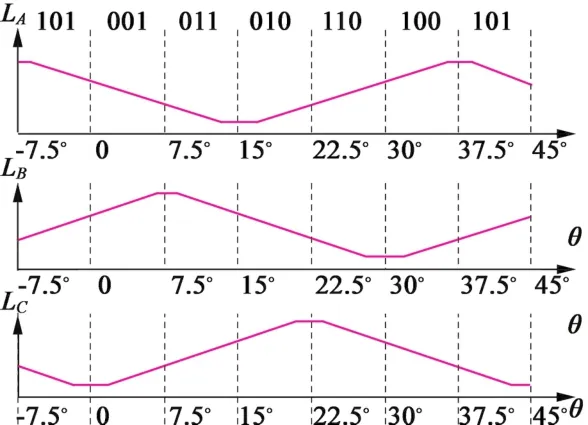
圖2 電感與位置信號關系曲線
由上一節的分析可知,要想在電機正轉時進行正確的制動,就必須產生合理的制動轉矩,如果通電相的選取不合理,就會引起轉子運行的紊亂。具體的來說:現在假如開關磁阻電機按照101→001→011→010→110→100這樣的位置信號進行高速電動運行,這時接收到制動的命令,由于轉速不會突變,轉向也就不會改變,為了得到合理的制動轉矩,需要進行換相操作。為了充分建立勵磁電流,開通角提前7.5°,在電感下降中間位置關斷開關管。三相通電制動控制策略如表1所示。當電機的轉速降低后,此時采用單相繞組通電或兩相繞組通電的制動策略。以單相繞組通電制動為例,即只給三相繞組的其中一相繞組通電,由于制動轉矩減小,電機就會慢慢停下來,從而避免了電機反轉的可能。只給A相繞組通電,開通角仍然提前7.5°,在A相電感下降的中間位置關斷,單相通電制動控制策略如表2所示。
在上述制動無反轉控制策略中,需要選擇一個合適的速度進行三相和單相的制動切換。如果切換得太早,電機轉速沒有降下來,將可能達不到快速制動的效果;如果切換得太晚,電機轉速接近零時,單相繞組不能可靠制動,電機會有反轉的可能。所以制動切換的最佳時刻應選在電機轉速為100~300 r/min范圍內,這樣單相繞組制動就會有充分的作用時間。

表1 三相通電制動控制策略

表2 單相通電制動控制策略
3 開關磁阻電機制動無反轉控制系統設計
本文以3 kW三相12/8開關磁阻電機為研究對象,給定電壓36 V,以DSPF28335為控制核心,以三相不對稱半橋為功率拓撲電路,驅動芯片采用EXB841芯片,選用6個IGBT作為開關器件。通過霍爾電流傳感器,將采樣電流信號經濾波后傳給控制器。3個光電開關管依次每隔60°安裝在以轉子為軸心的圓弧上,遮光盤共有8個圓弧,均勻分布在圓盤外圍。磁粉制動器作為負載。系統控制框圖如圖3所示。
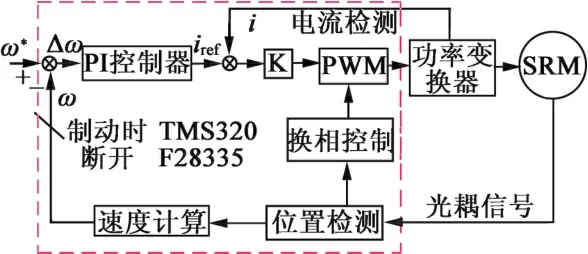
圖3 開關磁阻電機系統控制結構框圖
開關磁阻電機功率拓撲結構如圖4所示。VT1~VT6為6個IGBT開關管,VD1~VD6為6個續流二極管,C為儲能吸收電容。VT7和R一起組成泄放回路,R為泄放電阻,當電容C電壓超過一定值時,為了避免擊穿電容,此時將VT7打開,通過泄放電阻R將能量釋放。
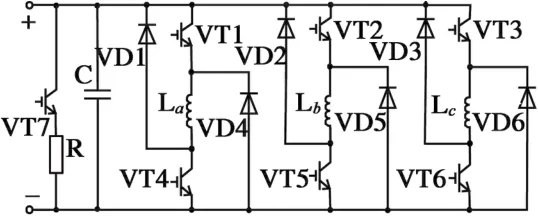
圖4 開關磁阻電機功率變換原理圖
軟件部分主要包括主程序和中斷服務程序,以CCSv6.0為軟件平臺,對TMS320F28335進行C語言編程實現對系統的控制[5-7]。系統上電后進入主程序循環,等待中斷服務程序到來。中斷服務程序主要包括定時器1中斷,捕獲中斷和外部中斷等。定時器1中斷主要完成電流環控制、轉速環控制和換相控制等。捕獲中斷主要完成位置信號更新和實時速度更新。圖5為主程序流程圖,圖6為定時器1中斷程序流程圖。
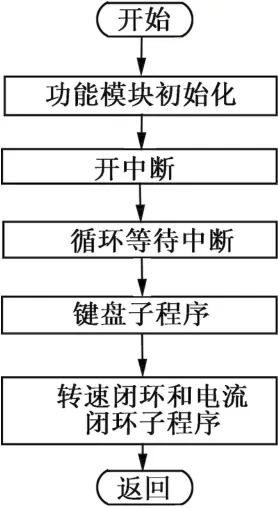
圖5 主程序流程圖
圖6 定時器1中斷程序流程圖
4 實驗驗證
實驗波形均在電機轉速為800 r/min時制動測出。通過LM331頻壓轉換芯片,把轉速信號轉換為正比的電壓信號,進而觀測轉速響應情況。從圖7、圖8和圖9的橫向縱向對比可發現,只用三相制動的時間約為1.68 s,而用三相結合單相制動的時間約為2.4 s,而只采用單相制動的時間約為3.22 s。從圖10、圖11和圖12的橫向縱向對比可發現,三相制動時制動時間短,沖擊電流大,產生較大的制動轉矩,較大的電流回饋母線,引起母線電壓泵升尖峰,電機迅速停下來,并且母線電壓有一段繼續下降的過程,電機有反轉傾向。三相結合單相制動時母線電壓上升明顯,制動電流全部通過續流二極管回饋到直流母線,電機無反轉逐漸停下來。單相制動時因為只有一相充電電流,母線電壓上升但沒有前兩種情況那么高,電機無反轉逐漸停下來。
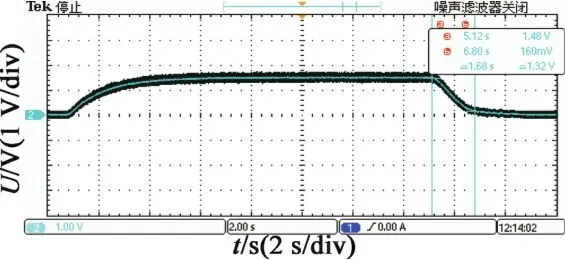
圖7 三相制動轉速波形(截圖)
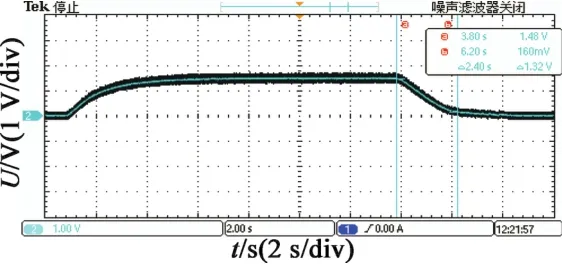
圖8 三相單相制動轉速波形(截圖)
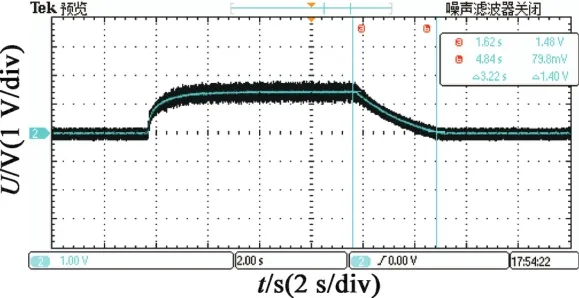
圖9 單相制動轉速波形(截圖)
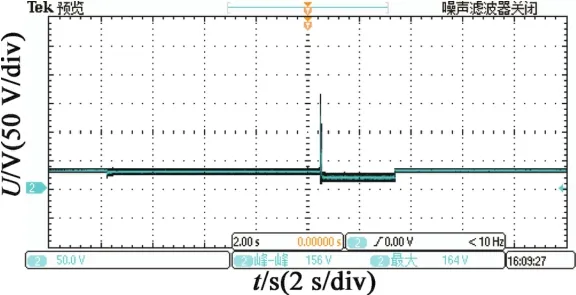
圖10 三相制動母線電壓回升情況(截圖)
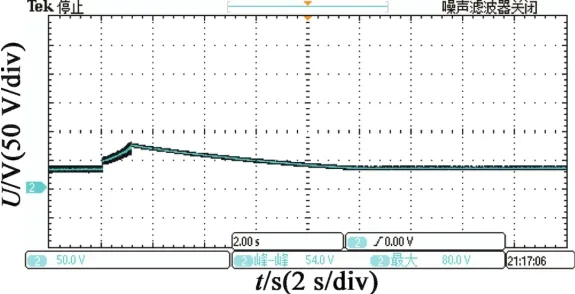
圖11 三相單相制動母線電壓回升情況(截圖)
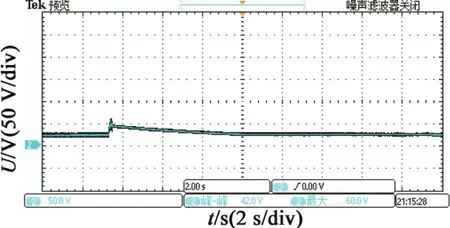
圖12 單相制動母線電壓回升情況(截圖)
綜合以上數據分析可知,采用三相結合單相的制動控制策略不僅能夠較好地滿足電機快速制動的要求,而且制動時電機在速度過零也不會反轉。
5 結 語
本文對開關磁阻電機的制動過程進行了分析,討論了先三相制動后單相制動的綜合制動策略,通過搭建實驗平臺及編寫程序,驗證了開關磁阻電機三相結合單相制動策略的可行性。三相結合單相制動的控制策略首先給三相繞組通電,使電機快速減速,然后給一相繞組通電,通過一相制動的方式可以有效避免電機停止后反轉的問題。
參考文獻
[1] 李廣海.3 kW開關磁阻電機的再生制動實現[J].中國電機工程學報,2004,24(2):1-3.
[2] 甘醇,吳建華,王寧,等.一種零電壓保持開通的開關磁阻電機再生制動控制策略[J].中國電機工程學報,2015,19(9):8-15.
[3] 吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010.
[4] 高赟,賈星辰.開關磁阻電機起動方案及關斷角優化研究[J].微特電機,2016,44(11):34-36.
[5] 孫建忠,許偉.基于dsPIC的開關磁阻電機調速系統設計[D],大連:大連理工大學,2010.
[6] WANG S Y,TSENG C L,CHIEN S C.Adaptive fuzzy cerebellar model articulation control for switched reluctance motor drive[J].IET Electric Power Applications,2012,6(3):190-202.
[7] 劉博強,孫建忠.開關磁阻電機驅動系統研究及實現[D].大連:大連理工大學,2010.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36