實心轉(zhuǎn)子感應(yīng)電機研究與發(fā)展概況(上)
2017-05-15 02:14:37王培欣司紀(jì)凱封海潮曹文平
微特電機 2017年8期
關(guān)鍵詞:結(jié)構(gòu)研究
王培欣,司紀(jì)凱,封海潮,劉 巍,曹文平
(1.河南理工大學(xué),焦作454003;2.Aston University,Birmingham,UK B47ET)
0 引 言
實心轉(zhuǎn)子感應(yīng)電機(以下簡稱SRIM)具有優(yōu)越的起動性能,適合頻繁重載起動或者長時間工作在制動狀態(tài)的特點[1],同時SRIM轉(zhuǎn)子結(jié)構(gòu)簡單、機械強度與平衡性高[2-3]、獨特的渦流特性等優(yōu)點,在起重設(shè)備領(lǐng)域,高速電機領(lǐng)域以及多自由度電機等領(lǐng)域具有較高的應(yīng)用價值。
SRIM的研究工作有近百年的歷史,由于SRIM較低的力能指標(biāo),所以一直沒有引起研究者的重視。上世紀(jì)50~60年代,主要側(cè)重于SRIM轉(zhuǎn)子參數(shù)與等值電路的研究;70年代后,隨著研究理論的深入以及實心轉(zhuǎn)子的結(jié)構(gòu)特點,研究學(xué)者對SRIM應(yīng)用價值的挖掘,提出多種新型派生實心轉(zhuǎn)子結(jié)構(gòu)用于降低SRIM的轉(zhuǎn)子阻抗,改良SRIM性能以及實心轉(zhuǎn)子應(yīng)用于多自由度感應(yīng)電機領(lǐng)域;90年代以來,隨著電力電子技術(shù)的發(fā)展,變頻器的容量與頻率的不斷提高,直接驅(qū)動型高速SRIM得到了前所未有的發(fā)展。
眾所周知,SRIM能夠頻繁重載起動,長時間工作在制動狀態(tài),適合于力矩電機以及動力設(shè)備,特別是Y系列軟起動與錐形實心轉(zhuǎn)子電機廣泛的應(yīng)用于起重設(shè)備。相對于永磁式電機與鼠籠式電機,SRIM具有簡單結(jié)構(gòu),價格便宜,機械強度高,耐腐蝕,可靠性高的優(yōu)點[4],在中高速電機領(lǐng)域應(yīng)用廣泛;SRIM特有的轉(zhuǎn)子渦流特性在多自由度感應(yīng)電機領(lǐng)域具有極高的應(yīng)用價值。由于Y系列軟起動與錐形轉(zhuǎn)子SRIM于起重設(shè)備應(yīng)用的成熟性與普遍性,本文不贅述起重用SRIM。
本文參考分析國內(nèi)外學(xué)者數(shù)十篇針對不同類型的SRIM研究成果,總結(jié)分析了實心轉(zhuǎn)子高速電機、旋轉(zhuǎn)直線電機以及平面多自由度電機的研究發(fā)展現(xiàn)狀,并分析預(yù)測其研究發(fā)展方向,為SRIM進(jìn)一步的研究與發(fā)展提供參考。
1 高速實心轉(zhuǎn)子感應(yīng)電機
高速電機在高速旋轉(zhuǎn)工作時,電機內(nèi)部溫度較高,同時電機轉(zhuǎn)子受到非常大的離心力,由于永磁式電機在高溫下永磁體弱磁與失磁,鼠籠式轉(zhuǎn)子結(jié)構(gòu)難以承受高速旋轉(zhuǎn)的離心力,而SRIM轉(zhuǎn)子結(jié)構(gòu)簡單,具有較高的溫度耐受性與高強度的應(yīng)力特性,因此SRIM在高速電機領(lǐng)域應(yīng)用廣泛[5]。在實心轉(zhuǎn)子高速感應(yīng)電機(以下簡稱HSSRIM)領(lǐng)域,國內(nèi)的研究與發(fā)展水平無論從裝機容量上還是最大轉(zhuǎn)速上都遠(yuǎn)低于國外的發(fā)展水平[4]。國外HSSRIM的研究處于世界領(lǐng)先水平,最大功率的HSSRIM為ABB公司2002年研制,速度可達(dá)20 000 r/min,功率達(dá)15 MW[6]。當(dāng)今最高轉(zhuǎn)速的HSSRIM速度可達(dá)180 000 r/min,功率為10 kW,電機效率約為85%[7]。國內(nèi)對HSSRIM的研究相對于國外滯后,其中沈陽工業(yè)大學(xué)[8]、哈爾濱工業(yè)大學(xué)[9]的研究工作者都對HSSRIM開展了許多研究工作。
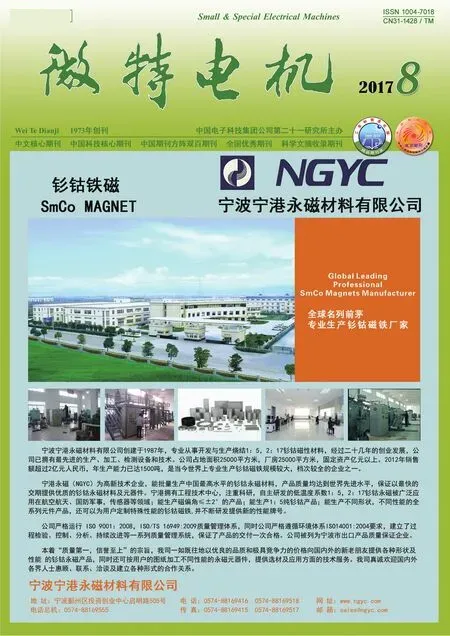
芬蘭學(xué)者Pyrhonen以一種極對數(shù)為1,功率為8 MW的氣體壓縮機用HSSRIM為研究對象[10-11],分析轉(zhuǎn)子結(jié)構(gòu)(光滑轉(zhuǎn)子、轉(zhuǎn)子開槽、銅籠結(jié)構(gòu)轉(zhuǎn)子,轉(zhuǎn)子開閉口槽)與轉(zhuǎn)子材料對電機性能的影響,開槽實心轉(zhuǎn)子槽數(shù)與電機轉(zhuǎn)矩波動和轉(zhuǎn)子損耗的關(guān)系,并且對比了轉(zhuǎn)子開槽結(jié)構(gòu)與轉(zhuǎn)子銅籠結(jié)構(gòu)電機的磁場分布與整體性能,其電磁場分布如圖1所示。
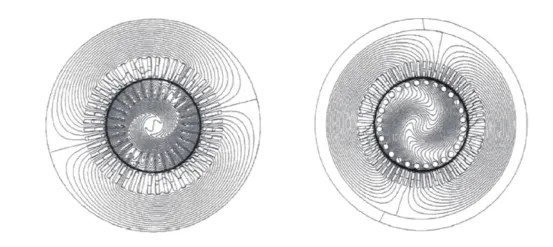
圖1 電機二維電磁場分布
相對于光滑實心轉(zhuǎn)子,開槽實心轉(zhuǎn)子能夠產(chǎn)生相對良好的電磁場,降低了轉(zhuǎn)子阻抗,但是,電機在高速工作時,會產(chǎn)生相當(dāng)大的轉(zhuǎn)子摩擦損耗。同時,開槽實心轉(zhuǎn)子的槽數(shù)影響電機的電磁轉(zhuǎn)矩與轉(zhuǎn)子損耗,槽數(shù)越多電機產(chǎn)生的電磁轉(zhuǎn)矩越大,轉(zhuǎn)子損耗越大,奇數(shù)槽的轉(zhuǎn)矩波動小于偶數(shù)槽。電機額定負(fù)載運行時,銅籠結(jié)構(gòu)轉(zhuǎn)子相對于開槽結(jié)構(gòu)轉(zhuǎn)子具有更小的滑差,磁場對轉(zhuǎn)子具有更好的透入深度特性。
德國達(dá)姆施特大學(xué)教授Yoseph設(shè)計分析一臺三相24 000 r/min的HSSRIM[12-13],其電機轉(zhuǎn)子結(jié)構(gòu)采用軸向開槽加銅端環(huán)結(jié)構(gòu)。由于過高的供電頻率,高速電機極數(shù)一般為2極或者4極。Yoseph教授在此電機極數(shù)選擇上分別從電機性能以及溫度場方面進(jìn)行研究,并與相同容量的永磁高速電機進(jìn)行對比。該電機極數(shù)為2極或4極時的電磁場分布如圖2所示。
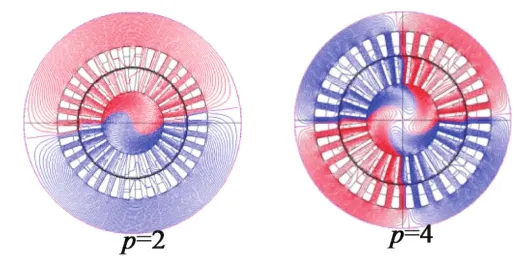
圖2 二維電磁場分布
相對于4極高速電機,2極高速電機達(dá)到相同速度時的供電頻率是4極電機的一半,所以2極高速電機具有更低的定子鐵耗與轉(zhuǎn)子損耗。在繞組溫度達(dá)到80 K和轉(zhuǎn)子速度為24 000 r/min時,2極高速電機的轉(zhuǎn)矩體積密度比4極的要高出30%,所以2極是高速電機更好的選擇。
印度學(xué)者Khanduri以一臺180 kW,轉(zhuǎn)速10 200 r/min的HSSRIM為研究對象[14],分析轉(zhuǎn)子材料與轉(zhuǎn)子端環(huán)的長度對電機性能的影響。研究發(fā)現(xiàn),轉(zhuǎn)子材料相對磁導(dǎo)率的增加,會導(dǎo)致電機功率因數(shù)的上升與輸出轉(zhuǎn)矩的下降,其幅度會隨著轉(zhuǎn)差率的下降而降低。在電機運行過程中,功率因數(shù)隨著電導(dǎo)率的增大而減小,隨著轉(zhuǎn)差率的下降而降低。在小轉(zhuǎn)差率條件下,輸出轉(zhuǎn)矩隨著電導(dǎo)率的增大而增大;在大轉(zhuǎn)差率條件下,輸出轉(zhuǎn)矩隨著電導(dǎo)率的增大而減小。轉(zhuǎn)子端環(huán)長度對電機的影響類似于轉(zhuǎn)子材料相對磁導(dǎo)率,輸出轉(zhuǎn)矩隨端環(huán)長度的增大而減小,功率因數(shù)隨端環(huán)長度的增大而增大,但功率因數(shù)變化的幅值隨轉(zhuǎn)差率的增大先增大后減小。對于HSSRIM來講,轉(zhuǎn)子材料的相對磁導(dǎo)率對電機性能的影響不大,在小轉(zhuǎn)差率運行時基本相同;轉(zhuǎn)子材料電導(dǎo)率對電機有很大的影響,高電導(dǎo)率能夠使電機輸出更大的轉(zhuǎn)矩;轉(zhuǎn)子端環(huán)對于改良電機特性有很重要的作用,較小的端環(huán)長度,電機有更好的轉(zhuǎn)矩輸出特性。
以上學(xué)者對HSSRIM做了一定的研究工作,另外文獻(xiàn)[15-19]中學(xué)者們也從各自的研究方向?qū)SSRIM的電磁場特性,輸出特性等方面進(jìn)行研究。針對HSSRIM的研究雖然有了一定的基礎(chǔ),但這些研究成果對于HSSRIM來說是否具有通用性還有待進(jìn)一步的研究,同時在HSSRIM的設(shè)計與分析方面還有很多問題亟待解決。例如,高頻工況下定子繞組的趨膚效應(yīng)與鄰近效應(yīng),增大繞組附加損耗[20],常規(guī)的計算方法忽略這些影響會帶來較大的誤差,這對電機參數(shù)的精確計算以及電機高精度控制系統(tǒng)的搭建帶來很大的困難。
2 實心動子旋轉(zhuǎn)直線感應(yīng)電機
實心動子旋轉(zhuǎn)直線感應(yīng)電機(以下簡稱SRRLIM)始現(xiàn)于上世紀(jì)70年代中期,波蘭學(xué)者E.A.Mendrela首先提出一種雙電樞直線旋轉(zhuǎn)電機,自此以來,SRRLIM得到了快速的發(fā)展,多種結(jié)構(gòu)的SRRLIM被國內(nèi)外的研究學(xué)者提出并作出大量的研究工作,為SRRLIM的發(fā)展作出寶貴的貢獻(xiàn)。SRRLIM相對于永磁式多自由度電機[21-23],磁阻式多自由度電機[24-29]復(fù)雜的電樞與動子結(jié)構(gòu),SRRLIM動子結(jié)構(gòu)相對簡單,以及特有的動子渦流特性容易配合多自由度電機定子產(chǎn)生的運動磁場,產(chǎn)生相應(yīng)的電磁力,做多自由度運動。
上世紀(jì)70年代中期,波蘭學(xué)者E.A.Mendrela首先提出的軸向雙電樞直線旋轉(zhuǎn)電機[30],該電機由軸向分布的旋轉(zhuǎn)定子與直線定子,和一個實心動子組成,其結(jié)構(gòu)如圖3所示。該電機旋轉(zhuǎn)定子與傳統(tǒng)旋轉(zhuǎn)電機定子結(jié)構(gòu)相同,產(chǎn)生旋轉(zhuǎn)轉(zhuǎn)矩,構(gòu)成旋轉(zhuǎn)驅(qū)動單元;直線定子與圓筒形直線電機定子結(jié)構(gòu)相同,產(chǎn)生直線推力,構(gòu)成直線驅(qū)動單元;旋轉(zhuǎn)與直線驅(qū)動單元共用一個實心動子,通過不同的供電方式,該電機能夠?qū)崿F(xiàn)旋轉(zhuǎn)、直線和螺旋運動。
圖3 雙電樞直線旋轉(zhuǎn)電機
上述雙電樞直線旋轉(zhuǎn)電機包含軸向串聯(lián)分布的兩套定子鐵心與電樞繞組,導(dǎo)致該電機結(jié)構(gòu)細(xì)長,限制該電機的應(yīng)用空間。另外,E.A.Mendrela又提出一種新結(jié)構(gòu)的雙繞組旋轉(zhuǎn)直線電機[31],由一個定子鐵心和兩套電樞繞組構(gòu)成其驅(qū)動單元,其結(jié)構(gòu)如圖4所示。
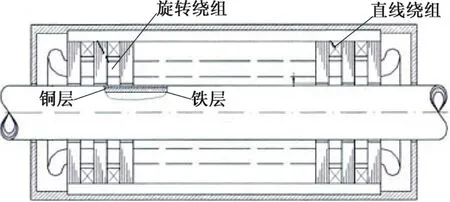
圖4 雙繞組旋轉(zhuǎn)直線電機
上述新結(jié)構(gòu)電機兩套電樞繞組分別沿軸向與周向嵌放在定子鐵心中,雖然極大減小了電機的軸向長度,節(jié)省了軸向空間,但是其鐵心疊片只能與其中一套繞組產(chǎn)生的磁場相配合,而不能有效地抑制另一套繞組產(chǎn)生的磁場作用于鐵心疊片產(chǎn)生的渦流。
美國德州農(nóng)工大學(xué)的學(xué)者提出一種單定子單電樞繞組的螺旋感應(yīng)電機[32-33],其定子結(jié)構(gòu)如圖5所示。該電機定子通過將螺旋狀的三相繞組固定在6個硅鋼疊片所構(gòu)成的定子鐵心的螺旋槽內(nèi),動子采用表面覆銅的圓筒形實心結(jié)構(gòu)。其電樞繞組通三相交流電后會產(chǎn)生螺旋運動磁場,驅(qū)動動子做螺旋運動。這種結(jié)構(gòu)電機只能做單一的螺距固定不變的螺旋運動,不能做直線或旋轉(zhuǎn)運動;而且由于其螺旋形繞組結(jié)構(gòu),電機的電磁是強耦合的,增加了兩個方向上力的解耦與轉(zhuǎn)矩控制的難度。
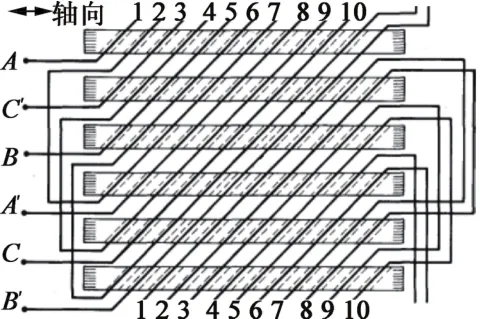
圖5 螺旋感應(yīng)電機定子繞組分布
日本早稻田大學(xué)與韓國高麗大學(xué)共同提出一種多定子直線旋轉(zhuǎn)電機[34],其結(jié)構(gòu)如圖6所示。該電機由4個沿圓周方向分布的獨立定子,以及由次級導(dǎo)體和鐵軛組成的動子構(gòu)成。4個定子線圈分別由獨立的移相器供電,通過控制各個定子繞組中電流的相角,使相鄰定子之間相互作用,產(chǎn)生軸向推力的同時,產(chǎn)生旋轉(zhuǎn)轉(zhuǎn)矩。
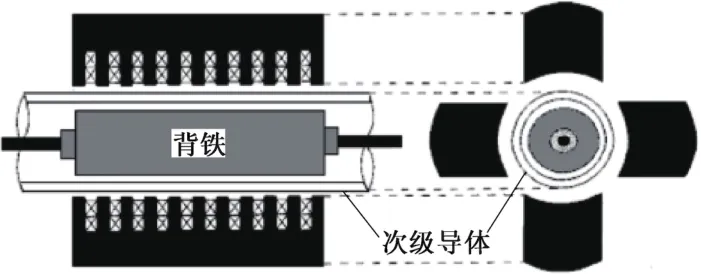
圖6 多定子直線旋轉(zhuǎn)電機
在此基礎(chǔ)上,早稻田大學(xué)又提出一種定子軸向分布的多定子旋轉(zhuǎn)直線電機[35],其結(jié)構(gòu)由4個軸向分布的旋轉(zhuǎn)定子與動子組成,仍然采用獨立的移相器供電,通過控制定子電流相位角使相鄰定子之間相互作用,驅(qū)動動子做多自由度運動。由于此類型電機其中一個自由度的運動是由定子之間的相互作用產(chǎn)生的,其電磁力的幅值與穩(wěn)定性難以計算與控制,而且該電機采用4個獨立的移相器供電,加大了電機控制系統(tǒng)與控制方法的復(fù)雜性與難度。
河南理工大學(xué)教授司紀(jì)凱提出一種兩自由度直驅(qū)感應(yīng)電機[36],該電機由旋轉(zhuǎn)弧形定子,直線弧形定子和表面附銅的圓筒形實心動子組成[37-38],其結(jié)構(gòu)如圖7所示。旋轉(zhuǎn)弧形定子產(chǎn)生旋轉(zhuǎn)磁場,驅(qū)動動子做旋轉(zhuǎn)運動;直線弧形定子產(chǎn)生行波磁場,驅(qū)動動子做直線運動。根據(jù)通電方式的不同,該電機能夠驅(qū)動動子做單一旋轉(zhuǎn)、單一直線或者合成螺旋運動。

圖7 兩自由度直驅(qū)感應(yīng)電機
上述新結(jié)構(gòu)的兩自由度直驅(qū)感應(yīng)電機的兩套定子鐵心在空間內(nèi)上下布置,雖然其旋轉(zhuǎn)運動與直線運動是解耦的,但是由于電機定子鐵心的開斷,端部效應(yīng)造成旋轉(zhuǎn)磁場與直線磁場相互耦合相互影響,電機性能因此降低,同時也造成了電機控制系統(tǒng)的復(fù)雜性。
實心動子旋轉(zhuǎn)直線感應(yīng)電機在結(jié)構(gòu)與工作性能上基本滿足了旋轉(zhuǎn)直線兩自由度電機的要求,但是每一種結(jié)構(gòu)的電機都有其優(yōu)劣性,適用于現(xiàn)實生產(chǎn)生活還有一定的距離。所以,如何優(yōu)化電機結(jié)構(gòu)及電磁參數(shù)以及研究與其配套的高精度控制系統(tǒng),使其滿足現(xiàn)實生產(chǎn)生活的要求,將會是SRRLIM的研究熱點與方向。
3 實心動子平面感應(yīng)電機
隨著精密加工等技術(shù)的迅速發(fā)展,平面電機在二維平面定位裝置特別是現(xiàn)代高精度機床、半導(dǎo)體微細(xì)加工裝備和集成電路光刻機等其他的超精密二維平面定位裝置中有非常廣闊的應(yīng)用前景[39-41],同時對于平面電機的精度、運行速度、運動維數(shù)以及可靠性等都有了更高的要求。實心動子平面感應(yīng)電機(以下簡稱SRPIM)以其簡單的次級平面結(jié)構(gòu),能夠?qū)崿F(xiàn)較寬范圍的平面驅(qū)動,適合于大負(fù)載平面驅(qū)動[42]。相比于永磁式與磁阻式平面電機,SRPIM的研究工作相對較少,電機結(jié)構(gòu)相對簡單。
日本九州大學(xué)的學(xué)者N.Fujii等提出一種平面感應(yīng)電機[43],其結(jié)構(gòu)如圖8所示,由環(huán)狀結(jié)構(gòu)的初級鐵心,簡單的次級導(dǎo)磁板構(gòu)成。電樞繞組通過不同的供電方式,既可以實現(xiàn)平面驅(qū)動,還可以實現(xiàn)平面上旋轉(zhuǎn)運動。當(dāng)所有線圈同時通電時,等同于軸向氣隙旋轉(zhuǎn)電機,做旋轉(zhuǎn)運動;將繞組線圈分成兩部分由兩個逆變器分別供電時,兩部分線圈產(chǎn)生的電磁推力合成后,驅(qū)動動子做直線運動。
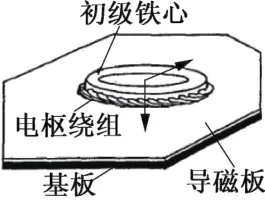
圖8 平面感應(yīng)電機結(jié)構(gòu)圖
耶拿應(yīng)用科技大學(xué)的教授Peter Dittrich等人提出一種三自由度平面感應(yīng)電機[44],其結(jié)構(gòu)如圖9所示,包括固定著4組初級定子(兩兩平行的直線電機定子)的動子,覆銅的基座組成,采用空氣壓力軸承使定子與動子相互分離,可以做X,Y軸方向上的直線運動和繞Z軸的旋轉(zhuǎn)運動。4組初級定子分別控制,任意平行的兩組定子通入相同的電流,將會產(chǎn)生直線推力,驅(qū)動動子在XY平面內(nèi)做直線運動;若通入不同的電流,將會產(chǎn)生繞Z軸的旋轉(zhuǎn)力矩,驅(qū)動動子在XY平面內(nèi)繞Z軸做旋轉(zhuǎn)運動。
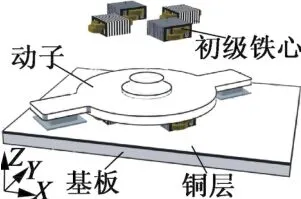
圖9 三自由度平面感應(yīng)電機結(jié)構(gòu)
日本東北學(xué)院大學(xué)與美國卡內(nèi)基梅隆大學(xué)研究了一種三定子平面感應(yīng)電機[45],電機結(jié)構(gòu)如圖10所示,該電機由三組直線定子(呈三角形分布,兩兩夾角為120°)與其固定裝置組成的動子,表面附銅的定子基板組成。三組直線定子分別控制,根據(jù)供電方式產(chǎn)生相應(yīng)的直線推力,最終合成推力驅(qū)動動子做XY平面內(nèi)的直線運動。
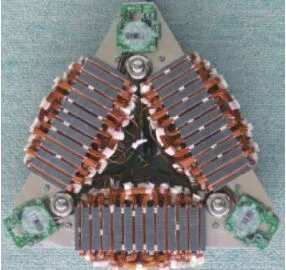
圖10 三電樞平面感應(yīng)電機動子結(jié)構(gòu)
平面感應(yīng)電機多采用多電樞結(jié)構(gòu),通過多個電樞的配合,所有電樞產(chǎn)生力矩的合成方向就是平面電機的運動方向,通過控制系統(tǒng)控制各個電樞所產(chǎn)生的直線推力,就能控制平面感應(yīng)電機的運動。平面感應(yīng)電機在但電樞工作時相當(dāng)于一般的直線感應(yīng)電機,但在多電樞共同協(xié)作時,其運動是相互影響的,并且由于磁滯等因素,各電樞電磁場之間存在著耦合的可能。運動的相互影響,磁場的耦合平面感應(yīng)電機的控制系統(tǒng)變得復(fù)雜,降低了控制精度,所以針對平面感應(yīng)電機的電磁場與運動場的研究,以及平面感應(yīng)電機解耦控制系統(tǒng)極其重要。
4 實心轉(zhuǎn)子感應(yīng)電機研究發(fā)展方向
通過以上實心轉(zhuǎn)子高速電機、旋轉(zhuǎn)直線電機以及平面多自由度電機研究現(xiàn)狀的討論總結(jié),結(jié)合SRIM簡單的轉(zhuǎn)子結(jié)構(gòu),轉(zhuǎn)子結(jié)構(gòu)穩(wěn)定性,以及獨特的渦流特性等優(yōu)點,因此可以預(yù)見以下方面將會是SRIM的研究發(fā)展趨勢。
4.1 高速以及超高速實心轉(zhuǎn)子感應(yīng)電機的設(shè)計與研究
高速以及超高速電機在高速工作時,會產(chǎn)生相當(dāng)高的電機溫升與轉(zhuǎn)子離心力,HSSRIM相比于永磁式與鼠籠式高速電機,其電機轉(zhuǎn)子具有更高的溫度耐受性與更穩(wěn)定的結(jié)構(gòu)強度。在一些特殊的工業(yè)領(lǐng)域,隨著變頻設(shè)備容量與頻率的增大,對于高速電機的速度進(jìn)一步的要求成為現(xiàn)實。HSSRIM速度的進(jìn)一步提升,轉(zhuǎn)子所受離心力與電機溫升隨之增大,對于電機轉(zhuǎn)子結(jié)構(gòu)的穩(wěn)定性與電機設(shè)備的整體穩(wěn)定而言都是更高的挑戰(zhàn)。現(xiàn)今對于HSSRIM的研究還不像普通電機那樣透徹,超高頻率下電機磁場的變化,電機轉(zhuǎn)子熱應(yīng)力特性等還沒有相對統(tǒng)一的研究結(jié)果,可以預(yù)見以下方面將是HSSRIM的研究趨勢:
(1)性能更加優(yōu)良的轉(zhuǎn)子材料與轉(zhuǎn)子結(jié)構(gòu)的研究。隨著HSSRIM速度的提升,現(xiàn)有材料的結(jié)構(gòu)強度與溫度耐受性難以滿足更高速度電機的需求。此外,優(yōu)良的轉(zhuǎn)子材料能夠降低轉(zhuǎn)子損耗,提高電機效率。所以,研究性能更加優(yōu)良的轉(zhuǎn)子材料,設(shè)計強度更高的轉(zhuǎn)子結(jié)構(gòu)對HSSRIM的研究工作非常重要。
(2)HSSRIM高速軸承的研究。軸承對于HSSRIM來說非常重要,HSSRIM在工作時承受著巨大的摩擦力與徑向應(yīng)力,軸承的結(jié)構(gòu)強度與可靠性對于HSSRIM的安全運行至關(guān)重要,隨著HSSRIM的容量與速度的提升,關(guān)于高速軸承的研究將是HSSRIM研究進(jìn)程的重要組成部分。
(3)HSSRIM多物理場耦合研究。HSSRIM還沒有相對系統(tǒng)或相對統(tǒng)一的研究設(shè)計理論。高頻磁場下電機的工作特性與溫升特性,高速旋轉(zhuǎn)與高溫下電機的應(yīng)力特性都有待進(jìn)一步的研究,這些研究工作對HSSRIM的設(shè)計與優(yōu)化具有重要意義。所以,針對高速以及超高速實心轉(zhuǎn)子感應(yīng)電機的電磁場、應(yīng)力場、溫度場等多物理場耦合特性研究將成為HSSRIM研究熱點。
4.2 SRRLIM的設(shè)計與優(yōu)化分析及其控制系統(tǒng)
SRRLIM相比于永磁式與磁阻式旋轉(zhuǎn)直線兩自由度電機,無論是電樞結(jié)構(gòu)還是動子結(jié)構(gòu),都相對簡單。SRRLIM復(fù)雜的電磁場與其動子復(fù)雜的渦流場是旋轉(zhuǎn)直線電機研究的重點與難點,場與場之間的耦合關(guān)系使得電機的控制系統(tǒng)相對復(fù)雜,控制精度相對較低。所以,可以預(yù)見以下方面將會是SRRLIM的研究趨勢。
(1)SRRLIM的結(jié)構(gòu)與電磁參數(shù)的優(yōu)化設(shè)計。現(xiàn)今的SRRLIM還都停留在實驗室階段,其性能難以滿足與現(xiàn)實生產(chǎn)生活的需求。根據(jù)工業(yè)應(yīng)用現(xiàn)場環(huán)境與要求,對SRRLIM的結(jié)構(gòu)與電磁參數(shù)的優(yōu)化設(shè)計,改良SRRLIM的機電性能,使其滿足現(xiàn)實生產(chǎn)的要求,將會是非常重要的研究要點。
(2)SRRLIM電磁場的特性研究。電磁場的特性研究是SRRLIM研究的基礎(chǔ)。相比于普通電機,SRRLIM復(fù)雜的電樞結(jié)構(gòu),兩個磁場復(fù)雜的邊界條件,非線性以及端部效應(yīng)等問題,使得SRRLIM的的電磁場難以簡化為二維解析計算,是典型的三維場問題。所以SRRLIM的電磁場特性研究是這種電機的設(shè)計和研究的難點與重點。
(3)SRRLIM的耦合問題與高精度解耦控制系統(tǒng)的研究。由于SRRLIM將兩個電磁場集合為一個電磁場,兩個運動系統(tǒng)融合為一個系統(tǒng),所以SRRLIM的電磁場與運動場都有存在耦合的可能。如何定量分析耦合對旋轉(zhuǎn)直線電機性能的影響以及在電機控制系統(tǒng)中如何實現(xiàn)解耦控制并提高控制精度,是旋轉(zhuǎn)直線電機亟待解決的關(guān)鍵問題。
4.3 平面感應(yīng)電機及其高精度控制系統(tǒng)的研究
SRPIM與其他實心轉(zhuǎn)子電機相似具有相對簡單的電機結(jié)構(gòu),一般由固定在動子上的若干個直線型電樞與表面覆銅基板構(gòu)成,各個電樞分別控制,通過各個電樞產(chǎn)生的合成電磁力驅(qū)動動子做直線或繞Z軸的旋轉(zhuǎn)運動。SRPIM與旋轉(zhuǎn)直線兩自由度感應(yīng)電機類似,多個電樞磁場之間耦合的存在,滯后的渦流場對電磁轉(zhuǎn)矩的產(chǎn)生存在什么關(guān)系,都是SRPIM尚未解決,也沒有相對系統(tǒng)的研究。SRPIM相對于永磁式與磁阻式平面電機,能夠?qū)崿F(xiàn)平面內(nèi)較大范圍內(nèi)直線運動,適合大負(fù)載平面驅(qū)動,但是其運動精度、響應(yīng)速度等都相對小于永磁式與磁阻式平面電機。
(1)SRPIM的電磁場與運動場的耦合問題。多電樞結(jié)構(gòu)電機一般都存在著電磁場的耦合問題,SRPIM也不例外,電機多個電磁場相互影響的同時,其運動是由多個方向上運動合成的,其運動也是耦合的,耦合的電磁場與運動場提高了SRPIM控制難度。所以研究SRPIM的電磁場與運動場耦合問題,尋找SRPIM的解耦控制算法,將是SRPIM的后續(xù)研究的關(guān)鍵。
(2)高精度SRPIM的控制系統(tǒng)的研究。SRPIM的運動精度、響應(yīng)速度都不如永磁式與磁阻式平面電機,這主要是由于感應(yīng)電機結(jié)構(gòu)決定的,改良電機結(jié)構(gòu)并不能直接提高SRPIM的這些性能,所以與SRPIM相配合的高精度控制系統(tǒng)的研究,通過控制的方法提高SRPIM的運行精度與響應(yīng)速度,是一種行之有效的方法,也將是SRPIM的研究重點之一。
5 結(jié) 語
實心轉(zhuǎn)子感應(yīng)電機以其獨特的優(yōu)點在高速電機領(lǐng)域,多自由度電機領(lǐng)域具有廣泛的應(yīng)用以及不可取代的價值。所以對于實心轉(zhuǎn)子感應(yīng)電機的研究具有很高的實際應(yīng)用價值,但是該類電機廣泛存在的低功率密度等缺陷還有待各國學(xué)者的進(jìn)一步研究。本文分析總結(jié)了高速實心轉(zhuǎn)子感應(yīng)電機電磁特性,實心動子旋轉(zhuǎn)直線感應(yīng)電機以及多自由度平面感應(yīng)電機的拓?fù)浣Y(jié)構(gòu)與工作原理等一系列實心轉(zhuǎn)子感應(yīng)電機的研究,討論了實心轉(zhuǎn)子感應(yīng)電機未來的研究熱點與發(fā)展趨勢。
參考文獻(xiàn)
[1] 尚靜,張子忠,孫藝勝.高速實心轉(zhuǎn)子異步電動機的發(fā)展前景[J].微電機,1992,25(4):23-27.
[2] 張明玉,唐孝鎬,林金銘.國內(nèi)外新型派生實心轉(zhuǎn)子異步電動機的發(fā)展與展望[J].電氣應(yīng)用,1991,(3):13-15.
[3] 傅豐禮.國外實心轉(zhuǎn)子異步電動機的研究動態(tài)[J].中小型電機,1985,(3):76-78.
[4] 張鳳閣,杜光輝,王天煜,等.高速電機發(fā)展與設(shè)計綜述[J].電工技術(shù)學(xué)報,2016,31(7):1-8.
[5] 江善林.高速永磁同步電機的損耗分析與溫度場計算[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010.
[6] AHRENS M,BIKLE U,GOTTKEHASKAMP R,et al.Electrical design of high-speed induction motors of up to 15 MW and 20000 RPM[C]//International Conference on Power Electronics,Machines and Drives,United Kingdom,2002:381-386
[7] RAHMAN M A,CHIBA A,FUKAO T.Super high speed electrical machines-summary[C]//IEEE Power Engineering Society General Meeting,2004:1271-1275
[8] 李玉超.280kW高速感應(yīng)電動機的設(shè)計與分析[D].沈陽:沈陽工業(yè)大學(xué),2015.
[9] 江虹.高速感應(yīng)電動機電磁設(shè)計方法的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[10] PYRHONEN J,NERG J.High-Speed,8 MW,Solid-rotor induction motor for gas compression[C]//International Conference on Electrical Machines,2008.
[11] PYRHONEN J,NERG J,KURRONEN P,et al.High-speed highoutput solid-rotor induction-motor technology for gas compression[J].IEEE Transactions on Industrial Electronics,2010,57(1):272-280.
[12] GESSESE Y,BINDER A.Axially slitted,high-speed solid-rotor induction motor technology with copper end-rings[C]//International Conference Electrical Machines and Systems.IEEE,2010:1-6.
[13] GESSESE Y,BINDER A,FUNIERU B.Analysis of the effect of radial rotor surface grooves on rotor losses of high speed solid rotor induction motor[J].IEEE International Symposium on Power E-lectronics,Electrical Drives,Automation and Motion,2010:1762-1767.
[14] KHANDURI G,KALRA S,AGRAWAL V.Rotor core material and end ring length analysis for solid-rotor high speed induction motor[C]//2014 Students Conference on Engineering and Systems(SCES),2014:1-6.
[15] 王映紅.實心轉(zhuǎn)子感應(yīng)電動機高速運轉(zhuǎn)性能分析[J].工礦自動化,2013,39(7):54-58.
[16] GIERAS J F,SAARI J.Performance Calculation for a High Speed Solid-Rotor Induction Motor[J].IEEE Transactions on Industrial Electronics,2012,59(6):2689-2700.
[17] GIERAS J F,SAARI J.Performance Calculation for a High-Speed Solid-Rotor Induction Motor[J].IEEE Transactions on Industrial Electronics,2012,59(6):2689-2700.
[18] MIRZAYEE M,MEHRJERDI H,TSURKERMAN I.Analysis of a high-speed solid rotor induction motor using coupled analytical method and reluctance networks[C]//International Conference on Wireless Communications and Applied Computational Electromagnetics.IEEE,2005:537-540.
[19] OGUZ A H,GüLBAHCE M O,KOCABAS D A.Design and optimization of an axially-slitted high-speed solid rotor induction motor[C]//International Conference on Electrical and Electronics Engineering(ELECO)。IEEE,2016:568-573
[20] BORISAVLJEVIC A,POLINDER H,FERREIRA J A.On the speed limits of permanent-magnet machines[J].IEEE Transactions on Industrial Electronics,2010,57(1):220-227.
[21] CHEN L,HOFMANN W.Design of one rotary-linear permanent magnet Motor with two independently energized three phase windings[J].International Conference on Power Electronics and Drive Systems.IEEE,2008:1372-1376.
[22] BOLOGNESI P,BRUNO O,PAPINI F,et al.A low-complexity rotary-linear motor useable for actuation of active wheels[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion,SPEEDAM 2010:331-338.
[23] JANG S,LEE S,CHO H W,et al.Design and analysis of helical motion permanent magnet motor with cylindrical halbach array[J].IEEE Transactions on Magnetics,2003,39(5):3007-3009.
[24] PAN J F,CHEUNG N C,CAO G.A rotary-linear switched reluctance motor[C]//3rd International Conference on Power Electronics Systems and Applications,2009:1-4.
[25] PAN J F,CHEUNG N C,CAO G.Investigation of a rotary-linear switched reluctance motor[C]//XIX International Conference on Electrical Machines.IEEE,2010:1-4.
[26] BENTIA L,SZABóL,RUBA M.On a rotary-linear switched reluctance motor[C]//Power Electronics,Electrical Drives,Automation and Motion(SPEEDAM),2012:507-510.
[27] SZABó L,BENTIA I,RUBA M.A rotary-linear switched reluctance motor for automotive applications[C]//XXth International Conference on Electrical Machines(ICEM),2012:2615-2621.
[28] PAN J F,ZOU Y,CHEUNG N C.Performance analysis and decoupling control of an integrated rotary–linear machine with coupled magnetic paths[J].IEEE Transactions on Magnetics,2014,50(2):761-764.
[29] SATO Y.Development of a 2-Degree-of-Freedom rotational/linear switched reluctance Motor[J].IEEE Transactions on Magnetics,2007,43(6):2564-2566.
[30] FLESZAR J,MENDRELA E A.twin-armature rotary-linear induction motor[C]//IEE Proceedings B,2008:186-192.
[31] MENDRELA E A,GIERCZAK E.Double-winding rotary-linear induction motor[J].IEEE Transactions on Energy Conversion,1987,1(2):47-53.
[32] CATHEY J J.Helical motion inuction motor[J].IEE Proceedings B-Electric Power Applications,1985,132(2):112-114.
[33] ALWASH J H H,MOHSSEN A D,ABDI A S.Helical motion tubular induction motor[J].IEEE Transactions on Energy Conversion,2003,18(3):362-369.
[34] JEON W J,TANABIKI M,ONUKI T,et al.Rotary-linear induction motor composed of four primaries with independently energized ring-windings[C]//Thirty-Second IAS Annual Meeting,Industry Applications Conference,1997:365-372.
[35] ONUKI T,JEON W J,TANABIKI M.Induction motor with helical motion by phase control[J].IEEE Transactions on Magnetics,1997,33(5):4218-4220.
[36] SI J,FENG H,AI L,et al.Design and analysis of a 2-DOF splitstator induction motor[J].IEEE Transactions on Energy Conversion,2015,30(3):1200-1208.
[37] 司紀(jì)凱,艾立旺,謝璐佳,等.兩自由度直驅(qū)感應(yīng)電機電磁場分析和特性計算[J].電工技術(shù)學(xué)報,2015,30(14):153-160.
[38] 司紀(jì)凱,韓俊波,司萌,等.兩自由度直驅(qū)感應(yīng)電機優(yōu)化設(shè)計及特性分析[J].電機與控制學(xué)報,2015,19(2):75-82.
[39] 寇寶泉,張赫.多自由度短行程超精密平面電機技術(shù)發(fā)展綜述[J].電工技術(shù)學(xué)報,2013,28(7):1-11.
[40] 寇寶泉,張魯,邢豐,等.高性能永磁同步平面電機及其關(guān)鍵技術(shù)發(fā)展綜述[J].中國電機工程學(xué)報,2013,33(9):79-87.
[41] 寇寶泉張赫,潘東華,等.平面電動機技術(shù)發(fā)展綜述[J].2011,43(2):67-71.
[42] 楊金明,吳捷,張宙,等.平面電動機的現(xiàn)狀及發(fā)展[J].微特電機,2003,31(6):31-34.
[43] FUJII N,FUJITAKE M.Two-dimensional drive characteristics by circular shaped motor[C]//Thirty-Third IAS Annual Meeting,2002:167-173.
[44] DITTRICH P,RADECK D.3-DOF planar induction motor[C]//2006 IEEE International Conference on Electro/Information Technology,2006:81-86.
[45] KUMAGAI M,HOLLIS R L.Development and control of a three DOF planar induction motor[C]//2012 IEEE International Conference on Robotics and Automation(ICRA),2012:3757-3762.
猜你喜歡
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學(xué)報(2017年2期)2017-07-05 08:13:02
影視與戲劇評論(2016年0期)2016-11-23 05:26:01