基于ARM的監控系統應用研究
2017-05-10 08:33:06韓士萍
赤峰學院學報·自然科學版 2017年8期
劉 程, 韓士萍
(1.合肥工業大學,安徽 合肥 230000,2.六安職業技術學院,安徽 六安 237000)
基于ARM的監控系統應用研究
劉 程1,2, 韓士萍2
(1.合肥工業大學,安徽 合肥 230000,2.六安職業技術學院,安徽 六安 237000)
隨著高新技術的不斷發展,ARM微處理器在許多領域都得到了廣泛地應用.為了使機房環境達到良好狀態、車載監控系統更好地服務于人們的出行以及能有效監控井下瓦斯情況,本文敘述了三種基于ARM的監控系統裝置,并就其應用展開了簡單的討論,希望能為監控領域的發展提供一定的參考.
ARM;監控系統;應用
1 前言
通常,監控系統主要包括前端監視(如攝像頭)、傳輸(如光纖、光纜等)、后端存儲、控制(如監控網絡管理平臺)以及顯示(如電視墻等)這五個設備.而隨著智能化時代的到來,監控系統構成也相應地發生了許多變化,市場上也隨之出現了不同類型的監控裝置.在科技與人們各種需求的推動下,未來監控系統也逐漸趨于智能化、遠程化、無線化、虛擬化以及自動化.作為本文所研究的對象,筆者試從ARM處理器的角度出發,針對不同領域的監控系統,簡單地分析了其設計與應用.
2 基于ARM的機房環境監控應用
針對機房環境變化問題,本文所設計的監控報警裝置主要由硬件與軟件兩部分組成,其整體框架如圖1所示.由圖1可知,該裝置采用的是ARM11型號控制器,針對機房里的電源、溫濕度、煙感、漏水以及人體進行監測,并通過ARM11分析處理后,以最直觀的觸摸屏顯示出來,同時將信息與處理后的數據儲存至WinCF系統里,隨后ARM11將相關信息通過GSM手機模塊以短信的形式發送至管理人員的手機上,當機房環境發生變化,或者超過事先設定好的各單項極限值時,該裝置就會發出警報聲,這時候管理人員便可以據此采取有效措施進行防控.
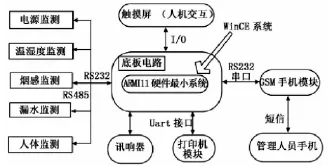
圖1 機房環境監控報警裝置框架圖
這里值得注意的是該裝置所采用的接口是RS232與RS485相互轉換的,且監控裝置的運行通過AT控制指令進行操作,不管是采集信息,上傳數據,還是處理數據,都需要我們編寫程序(C語言).而報警的信息是以特殊代碼進行反饋的,如異常情況代碼為05等.此外,該系統裝置的軟件設計部分則是在Visual Studio2010平臺上進行相關開發的.而數據采集程序的流程:開始→串口初始化→創建接收處理線程→判斷是否有采樣時間更改→采樣時間具體轉至→向傳感器系統發送采集命令→數據寫入數據庫并顯示→判斷數據是否超過標準值→作出判斷并發出警報.當然,也可以事先通過編程設置定時發送警報,但是這種事先定時的,雖然能做到對監控的頻繁報警,但是容易引起人員恐慌,不宜采用.而遠程實時監控可以通過短信方式進行,如機房某一指標超標或者某幾項指標超標時,該系統裝置能通過GSM模塊向管理人員發送有針對性的短信,如短信內容可以設置為漏水情況、溫濕度多少、煙霧程度等.
3 基于ARM的車載視頻監控應用
近年來,隨著交通行業的大力發展,許多科技手段也相應地被運用進來了,如針對逃票的智能刷票關卡機等,但即便如此,汽車、火車以及客船上還是會出現少許逃票人員,在處理逃票人員時,往往我們乘務人員態度的轉變會導致與這些逃票人員產生糾紛.此外,在一些車內盜竊事件中以及交通事故中等也會因為沒有有效證據,給當事人造成一些不必要的損傷.
因此,基于此,本文提出了一種基于ARM的車載視頻監控裝置,測試結果顯示(參見文獻[2]),該裝置是可行的,而且能有效改善以上局面.
本文所設計的車載視頻監控裝置包括移動監控終端、網絡傳輸以及遠程客戶端等,其總體框架圖如圖2所示,通過圖2,我們可以知道該裝置的工作原理,即利用攝像頭捕捉車內區域情況,并將相關信息(如時間、運行速度、具體位置等)傳送至ARM控制器,經過編碼后,傳至流媒體服務器并對數據進行處理,接著回至boa服務器,最后通過反饋信息,對視頻圖像編碼與采集速度進行有效控制.其中數據的接受、傳送、解碼以及顯示等均是通過ActiveX控件來實現的.
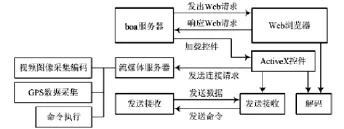
圖2 車載視頻監控裝置總體框架圖
這里需要說明的是該裝置硬件主要由USB攝像頭、3G無線模塊、GPS定位模塊、外圍電路、電源與時鐘電路模塊、FLASH、SDRAM以及LCD控制器組成,而軟件則是采用Linux操作系統.
4 基于ARM的井下瓦斯監控應用
在面對復雜而又特殊的煤礦井下時,有時候傳統瓦斯傳感采集裝置不足以滿足要求.因此,本文提出了一種基于A RM的CAN總線井下瓦斯監控裝置,以彌補傳統瓦斯監控裝置的不足.該裝置使用ARM處理器,并嵌入Linux操作系統,以便實現了井下實時監控.其框架圖如圖3所示.由圖3可知,各ARM監測分站通過CAN總線進行通信,井上通過CAN-Ethemet通信網關進行實時監控管理.當井下所采集到的瓦斯超過一定值時,該裝置將會自動發出閃光警報聲,用戶在接受到警報后,能在第一時間內作出響應,這樣不僅可以有效監控井下瓦斯濃度,而且還可以在一定程度上降低瓦斯事故的發生率.
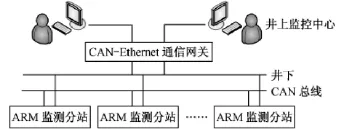
圖3 煤礦井下瓦斯監控裝置框架圖
該裝置硬件部分的設計.其中瓦斯監測分站的設計總圖如圖4所示.由圖4可知,在作業人員進行井下工作前,該裝置將瓦斯濃度通過電橋檢測單元轉換為直流電,經運放單元至S3C2410處理器,接著,對信息進行處理對比并作出是否發出閃光警報,然后,管理人員通過LCD顯示器進行直觀查看,最后,作出響應.而該裝置軟件部分設計,其中瓦斯濃度采集程序設計則是采用循環方式對模擬信號進行采集和轉換的.CAN驅動程序與CAN通信程序均由代碼編寫完成.
5 結論
根據以上對機房環境的監控、車載視頻監控以及煤礦井下瓦斯監控的敘述,我們可以知道,基于ARM處理器的監控系統裝置是可行,而且十分有效的,它在監控領域的應用成為當前發展潮流,不僅及時高效地對所屬區域進行了實時監控,而且還將監控系統裝置推向了前沿科技層次,使得未來監控系統的發展逐漸趨于自動化、智能化以及微小化.
〔1〕段振剛,許家云,廉小親,等.基于ARM11的機房環境監控報警系統的設計與實現[J].計算機測量與控制,2014,22(12):4133-4136.
〔2〕谷勝,王建華.基于ARM Linux的3G無線車載視頻監控系統 [J].現代電子技術,2012,35(23): 141-145.
〔3〕孟艷清,趙宏偉,鄒育霖.基于ARM的開關柜智能監控裝置研究[J].高壓電器,2014(3):29-35.
〔4〕趙蒼榮,周孟然.基于ARM的CAN總線井下瓦斯監控系統[J].工礦自動化,2008(6):13-16.
〔5〕廖之健.基于ZigBee無線傳感網絡遠程機房環境監控系統的研究與實現[D].廣東工業大學,2011.
〔6〕趙春媛,李萌,韓會山,等.基于ARM9的無線視頻監控系統設計與實現[J].計算機工程與設計,2012,33(2):529-534.
〔7〕侯益坤,劉益標,侯聰玲.基于ARM和μC/OS-Ⅱ的移動機器人控制系統設計[J].機械設計與制造,2009,37(8):27-29.
〔8〕彭畑,張文普,牟雨飛.基于嵌入式Web的監控系統的設計與實現[J].北京聯合大學學報:自然科學版,2010,24(4):26-28.
TP273
A
1673-260X(2017)04-0014-02
2017-02-10
安徽高校自然科學研究項目資助,項目名稱:ARM多路溫濕度采樣系統(KJ2015A380)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
