基于衰減記憶卡爾曼濾波的無刷直流電機轉子位置估計
2017-05-02 07:38:06詹國兵
微特電機 2017年5期
詹國兵
(徐州工業職業技術學院,徐州 221140)
0 引 言
無刷直流電機(以下簡稱BLDCM)因其高效率、易于控制等優點被廣泛使用。該電機轉子為永久磁鋼,定子為電樞繞組,為產生單一方向的力矩,定子永久磁鋼磁場和轉子電樞反應磁場必須相互垂直,要求控制系統需要明確當前轉子位置。現今大部分無刷直流電機采用霍爾位置傳感器,但存在成本高、尺寸大、可靠性差等問題,因此學者致力于無位置傳感器的研究[1-5],如:文獻[1]設計了基于粒子群優化算法的BLDCM轉速PID控制系統,通過檢測電機的反電動勢來獲得轉子的位置信息,并驗證了在空載和滿載的情況下電機的轉速、轉矩響應情況。文獻[5]提出了一種基于線電壓的轉子位置檢測方法,通過獲得線電壓波形計算電機的反電動勢,判斷電機的換相點。
卡爾曼濾波作為一種最優狀態估計,在轉子位置信息估計中獲得了廣泛的應用[6-11],如:文獻[6]采用擴展卡爾曼濾波的方法,通過量測電機的線電壓和相電流實現電機轉子位置的估計。文獻[7]設計了雙擴展卡爾曼濾波器(以下簡稱DEKF)無傳感器控制方法,該方法同時對電機的狀態和參數進行濾波,解決了電機參數不準確引起濾波器發散問題,但控制模型不精確依然會導致濾波器發散。文獻[9]研究了基于擴展卡爾曼濾波(以下簡稱EKF)相位增益校正的無傳感器BLDCM速度控制,針對不同轉速校正了反電動的相位滯后和幅度畸變。文獻[11]基于EKF并從反電動勢歸一化值中獲取電機的轉子位置信息。
BLDCM參數不易精確測量且運行時會發生變化,所建立的電機數學模型是在理論假設基礎上存在誤差,這導致在使用卡爾曼濾波時容易出現濾波發散、精度變差、速度變慢。衰減記憶卡爾曼濾波(以下簡稱MAEKF)通過弱化舊量測值權重,提高新量測值權重,雖然失去了理論上的最優,但保證了濾波器的收斂和穩定性[12-14]。本文在分析BLDCM數學模型的基礎上,通過對電機的相電流進行量測,利用MAEKF實現電機的轉子位置角、轉速的估計,然后通過轉子位置角和相電流導通關系實現電機的換相。該方法對系統的模型和參數的準確性要求較低,系統穩定性高,具有較強的魯棒性。
1 BLDCM數學模型
無刷直流電機雖然也稱為直流電機,但與直流電機有本質區別。該電機主要是由轉子和定子2部分組成。其中,轉子是電機旋轉部分,主要由轉軸、永久磁鋼和磁軛等部件組成,永久磁鋼在氣隙中建立永磁磁場;定子主要由繞組、軸承、機蓋等部分組成,工作時,繞組中通入梯形波相電流,通過換相控制,繞組在氣隙中產生變化磁場。轉子在一周期內產生恒定方向的力,驅動轉子連續旋轉。轉子磁鋼旋轉之后,旋轉的永磁磁場又反過來切割繞組線圈,并在定子繞組中產生感應電勢。從BLDCM工作原理可以看出,該電機的相電流、反電動勢、相電壓等必定存在數學上的一一對應關系。
1.1 微分方程模型
忽略氣隙不均勻性和邊緣擴散現象對氣隙磁感應強度的影響,BLDCM氣隙磁感應強度可認為沿定子內徑表面呈梯形分布。以a相繞組為例,a相繞組反電動勢可表示:

(1)
式中:N為繞組的匝數;S為繞組在定子內徑表明圍成的面積;ω為電機電角速度;θ為轉子位置角。
BLDCM繞組相電壓由電阻壓降、交變電流引起的繞組自感電動勢、繞組間互感電動勢和繞組磁通量變化引起的感應電動勢組成,a相繞組相電壓可表示:

(2)
式中:R為每相繞組電阻;L為每相繞組自感;M為a相繞組與b相和c相繞組的互感;ia為a相繞組的電流;un為中性點電壓。
b相,c相繞組相電壓與a相類似,三相繞組的相電壓可表示:

(3)
式中:ua,ub,uc為三相繞組相電壓;ia,ib,ic為三相繞組電流;ea,eb,ec為三相反電動勢;R為每相繞組電阻;Ls為每相繞組自感與互感差;Ls=L-M。
無刷直流電機轉矩表達式可表示:
P=Teω
(4)
式中:Te為電磁轉矩;ω為電機機械角速度。
電磁功率為每相反電動勢與相電流的乘積之和,即:
P=eaia+ebib+ecic
(5)
代入式(5),Te可表示:
Te=(eaia+ebib+ecic)/ω
(6)
代入式(5),電磁轉矩可表示:
Te=λm(Bδaia+Bδbib+Bδcic)
(7)
式中:λm=2NS;Bδa,Bδb,Bδc分別為a,b,c相繞組的氣隙磁密。
電機的運動方程可表示:
(8)
式中:TL為負載轉矩;J為轉子轉動慣量;Bv為粘滯摩擦系數。
電機的轉子位置角與轉速關系可表示:
(9)
1.2 無刷直流電機MAEKF狀態模型
無刷直流電機MAEKF模型的狀態方程可以通過式(3)、式(8)、式(9)作代數變換得到。這里選擇三相電流、電機轉速和轉子位置角作為狀態變量,得到BLDCM的MAEKF狀態模型如下:
xk+1=Φkxk+Rkuk
(10)
式中:xk=[ia,ib,ic,ω,θ]T
uk=[ua,ub,uc,TL]T。
2 MAEKF無傳感器控制實現
2.1 無刷直流電機MAEKF設計
無刷直流電機同其它電機一樣,電機在運行時繞組電阻、電感、繞組與繞組之間的互感、磁鏈等參數均會因為電機運行狀態的變化而發生變化,最終導致電機的數學模型產生失真。BLDCM的數學模型是在忽略渦流損耗、磁滯損耗、齒槽效應等基礎上建立的,這也會導致電機模型在一定程度上的失真。因此,BLDCM無傳感器控制需要對模型敏感性不高的、魯棒性更好的濾波器。MAEKF與傳統卡爾曼濾波器最大的不同之處在于引入衰減因子,降低濾波器對前期量測值的敏感程度,把重點放在最近的量測值上,降低了系統因累積誤差導致的發散問題。加入衰減因子α導致卡爾曼濾波器在理論上失去了最優性,但穩定性和收斂性更好。
建立基于相電流的BLDCM狀態空間方程,并離散化得:
xk+1=Φkxk+Rkuk+Gkwk
(11)
yk=Hkxk+Qkvk
(12)

參考文獻[7],系統的隨機擾動和量測噪聲的協方差矩陣Gk和Qk:

在k時刻,系統的估值方程可表示:
(13)
式中:Kk為衰減記憶卡爾曼濾波增益。該值的大小可以決定濾波器估計與真實狀態之間的偏差程度,該值越大,系統的估值越接近于系統的量測值,反之越接近于系統的計算值。
卡爾曼濾波器增益的最優標準是使k時刻估計誤差的方差和最小,即通過最小化E(JN)得到卡爾曼濾波器增益,這里的JN:

(14)

(15)
其中,代價函數的第一個α最小化當前時刻的協方差,這有利于濾波器最終收斂的狀態估計值更接近于系統的新量測值;代價函數的第二個α只是為了方便數學處理,當進行最小化求值時認為常數。
改進后的卡爾曼濾波器增益:
(16)
估計誤差協方差的濾波更新方程:
(17)
估計誤差協方差的估值方程可表示:
Pk|k-1=α2kPk-1|k-KkHkPk-1|k
(18)
2.2 MAEKF控制結構
采用MAEKF的無位置傳感器BLDCM控制方案結構如圖1所示。
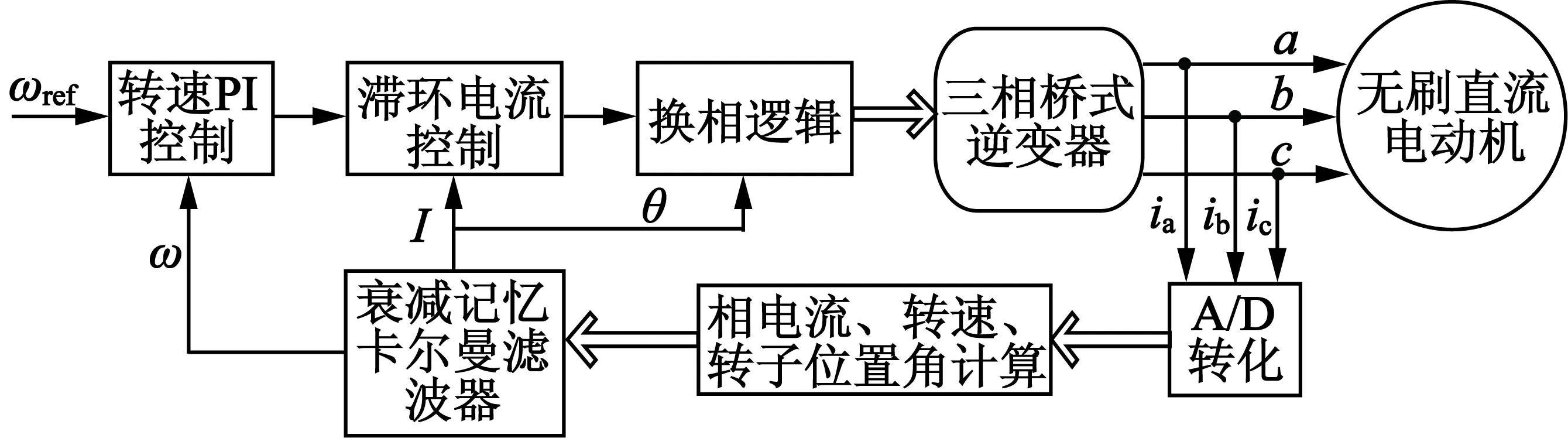
圖1 MAEKF控制方案結構框圖
該控制結構主要由轉速PI控制、滯環電流控制、電機參數計算、MAEKF濾波器和BLDCM 5部分組成。通過采樣三相繞組相電流(ia,ib,ic),經AD轉化后計算三相繞組相電流并作為模型的輸入,狀態變量為三相繞組相電流、轉速ω和電角度θ,并根據轉子位置關系確定電機換相時刻。電角度與電機繞組和功率器件的工作關系如表1所述。

表1 電角度與電機繞組和功率器件的工作關系
2.3 仿真研究
在MATLAB/Simulink中建立基于MAEKF的BLDCM無位置傳感器控制模型,該模型轉速采用PI控制,電流采用滯環控制。電機起動后空載運行并在0.4 s時突加0.1 N·m的轉矩負載。仿真結果如圖2~圖4所示。
負載轉矩突變時刻電機轉速、轉矩和轉子位置信號測量波形如圖2所示。由圖2可得,在負載轉矩突變時電機轉速突降,但在0.2 s時轉速達到穩態值。電機響應時間等可通過PI控制器調節。
圖3為電機在負載轉矩突變時刻,三相電流ia,ib,ic與霍爾信號Ha,Hb,Hc波形圖。由圖3可得,負載轉矩突增導致相電流幅值增大,相電流的周期變長,電流幅值增大導致電磁轉矩提高實現平衡負載轉矩。仿真結果表明:電機在負載轉矩突變時刻能準確獲取轉子位置信號,電機沒有出現失速、缺相運行的情況,說明該方法在電機負載轉矩突變時刻仍可穩定運行。

圖2 負載轉矩突變時刻電機轉速、轉矩和轉子位置角波形

圖3 負載轉矩突變時刻相電流與霍爾信號波形

圖4 帶負載長時間運行的轉速、轉矩和轉子位置角波形
在0.1 N·m的負載轉矩下,電機長時間運行的轉速、轉矩和轉子位置角關系如圖4所示。負載轉矩恒定時,電機的轉速達到設定值,穩態誤差為零;輸出的電磁轉矩為定值,輸出的轉矩紋波是由于換相時的相電流變化不連續導致的換相轉矩脈動;測量的電機轉子位置角變化連續。仿真結果表明了該系統在帶負載長時間運行時也不會因為模型的精度問題導致系統發散。
電機在負載轉矩突變和長時間帶負載的過程中均沒有失速的情況,轉速、轉矩和轉子位置角輸出連續,相電流與霍爾信號對應關系準確,MAEKF在負載轉矩突變和恒定的工況下均能很好地估計電機轉子位置,準確給出電機換相點,沒有出現換相錯誤問題,仿真結果表明該方法具有較強的魯棒性,驗證了該方法的可靠性。
3 實驗驗證
以DSP處理器作為主控單元,以IGBT構成三相全橋驅動單元和一臺星型連接無刷直流電機作為被控對象的實驗系統平臺上驗證上述方法的正確性。該系統采用霍爾元件ACS758LCB將相電流轉化為電壓信號,轉化后的電壓信號經電壓跟隨器進行阻抗匹配后送入DSP數模轉換模塊,然后通過AD采樣獲得相電流的大小。實驗樣機參數:額定直流側電壓ud=24 V;額定轉矩TN=0.18 N·m;額定轉速nN=2 000 r/min;衰減因子α=1.036。
實驗電機空載起動,自由加速到穩態后在0.4 s突加0.1 N·m的負載。實測電機的轉速和負載突變時刻的相電流波形如圖5、圖6所示。

圖5 實測電機轉速波形

圖6 負載轉矩突變時刻的
在負載轉矩突增時,相電流周期變長,相電流增大引起電磁轉矩增大來平衡負載轉矩;試驗過程在負載轉矩突變時刻沒有產生轉速突變和失步的現象。實驗表明該方法在負載轉矩突變時刻能很好地估算轉子位置,實現準確換相。
電機霍爾信號和功率器件的動作關系如圖7所示,從量測的波形可以看出,功率器件動作略遲滯于霍爾信號,遲滯時間非常短僅為數微秒。負載轉矩突變雖然會引起轉速的突降,并影響了相電流的波形,但是不會影響系統對轉子位置角的估計,系統仍能準確給出換相點,實驗結果驗證了控制方法的可行性。

圖7 電機霍爾信號和功率器件動作波形
4 結 語
本文提出了一種基于衰減卡爾曼濾波的無刷直
流電機無位置傳感器控制方法,該方法通過量測電機的相電流,實現對電機轉子位置角和轉速的估算,經實驗驗證得到以下結論:
1)該方法在負載恒定、轉矩突變時均能很好地給出轉子位置信號,電機運行平穩,沒有失速等不良現象;控制系統對電機參數攝動、模型誤差等問題具有較強的魯棒性;具有較高的可靠性和實用性。
2)該方法對電機參數、模型精度要求不高,但對參數測量準確性具有一定的要求。調試時可根據系統條件,調節衰減因子來均衡模型不精確和參數測量誤差對系統的影響,實現系統最優。
[1] KIREE C,KUMPANYA D,TUNYASRIRUT S,et al.PSO-Based optimal PI(D) controller design for brushless DC motor speed control with back EMF detection[J].Journal of Electrical Engineering & Technology,2016(5):715-723.
[2] 潘積蘭,余建成,劉二豪.無位置傳感器無刷直流電動機位置誤差分析及補償[J].微特電機,2016,44(2):41-44.
[3] 郭子釗,佃松宜,向國菲.基于卡爾曼濾波算法的無刷直流電機直接轉矩控制[J].科學技術與工程,2016,16(17):49-55.
[4] 吳耀春,韓向可.基于MCP8025的無位置傳感器無刷直流電機控制系統設計[J].微特電機,2016,44(9):83-85.
[5] 殷帥,馬鐵華,呂彩琴.線電壓確定無刷直流電動機轉子位置新方法[J].微特電機,2016,44(2):37-40.
[6] TERZIC B,JADRIC M.Design and implementation of the extended Kalman filter for the speed and rotor position estimation of brushless DC motor[J].IEEE Transactions on Industrial Electronics,2002,48(6):1065-1073.
[7] 林海,嚴衛生,林洋,等.雙擴展卡爾曼濾波的無刷直流電機無傳感器控制[J].西北工業大學學報,2010,28(2):197-201.
[8] 史婷娜,張倩,夏長亮,等.基于UKF算法的無刷直流電機轉子位置和速度的估計[J].天津大學學報,2008,41(3):338-343.
[9] 林益平.基于EKF相位增益校正的無傳感器BLDCM速度控制[J].電氣傳動,2007,37(6):12-15.
[10] BRUNSBACH B J,HENNEBERGER G,Brunsbach B J,et al.Field-oriented control of an induction motor without mechanical sensors using a Kalman-Filter[J].Archiv Für Elektrotechnik,1990,73(5):325-335.
[11] 郭鴻浩,周波,劉穎,等.永磁無刷直流電機角加速度估計[J].電工技術學報,2014,29(5):93-103.
[12] 蔡佳,黃長強,井會鎖,等.基于指數加權的改進衰減記憶自適應濾波算法[J].探測與控制學報,2013,35(4):21-26.
[13] 高偉,葉攀,許偉通.改進的自適應衰減卡爾曼濾波算法[J].計算機測量與控制,2016,24(8):190-192.
[14] 曲毅,劉忠,孫世言.純方位被動目標運動分析的衰減記憶卡爾曼濾波算法[J].武漢理工大學學報(交通科學與工程版),2006,30(5):817-819.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
