垂線偏差對空中對準航向誤差的影響研究*
2017-04-21 06:58:05夏家和成果達吉翠萍西安飛行自動控制研究所西安710065
傳感技術學報 2017年4期
夏家和,成果達,吉翠萍(西安飛行自動控制研究所,西安 710065)
?
垂線偏差對空中對準航向誤差的影響研究*
夏家和*,成果達,吉翠萍
(西安飛行自動控制研究所,西安 710065)
針對性分析了垂線偏差變化對空中對準航向精度的影響。首先給出了常用空中對準降階濾波模型,分析了垂線偏差變化影響空中對準航向誤差的機理。然后通過實測離線數據測試驗證了垂線偏差對空中對準航向誤差的影響。最后通過誤差協方差分析方法仿真了降階濾波模型在真實世界中的濾波性能。離線測試及仿真結果表明:在給定條件下垂線偏差變化率對航向誤差的影響相對其他未建模慣性測量組件誤差是主要的,對航向對準誤差影響較大,可達0.15°。在中高精度應用中為保證在不同空域內空中對準航向精度考慮采用高精度重力場模型對垂線偏差進行補償是必要的。
捷聯慣導;空中對準;協方差分析;垂線偏差
工程應用中重力加速度的補償一般采用簡化正常重力模型計算,忽略擾動重力。在中低精度慣導系統應用中,慣性測量組件誤差是主要誤差源,相對來說擾動重力對系統的影響可以忽略。隨著慣性器件精度的不斷提高及高精度慣性導航系統需求的發展,擾動重力已然成為高精度慣導一項不可忽略的誤差源。重力擾動分為垂線偏差和重力值異常兩部分,由于高度通道一般工作在阻尼狀態,因此垂線偏差的影響大于單純重力異常的影響。不少公開文獻分析了垂線偏差對慣導系統的影響,包括地面羅經對準、導航及組合導航系統的影響[1-2]。文獻[1]指出垂線偏差是高精度慣性導航系統的一項主要誤差源,導出了初始對準階段姿態的穩態誤差值,對比了不同地區垂線偏差引起的導航誤差。文獻[2]通過對某海域重力異常的計算,分析擾動重力矢量引起的慣性導航系統位置與速度誤差量級的大小及特性。但目前公開研究不涉及垂線偏差對動基座對準如空中衛星輔助對準的影響[3-6]。如文獻[3]在進行空中對準誤差分配分析時,提及重力模型誤差,但沒有深入對垂線偏差的影響進行分析。本文針對性分析垂線偏差對空中對準航向誤差的影響,首先分析了垂線偏差影響空中對準航向誤差的機理,然后通過實測數據離線對比了某次試飛試驗數據補償垂線偏差前后的航向對準精度,最后通過協方差分析方法分析了降階空中對準算法在給定場景下的工作性能。分析結論對空中對準工程方案設計及簡化有一定的借鑒意義。
1 空中對準算法
對于捷聯慣導系統,導航坐標系選為東北天地理坐標系,降階空中對準算法一般考慮其數學平臺誤差、速度誤差、位置誤差、陀螺隨機常值漂移以及加速度計隨機常值偏置,認為慣性測量組件的其他誤差項及慣性系統與輔助衛星導航系統之間的時空差異已經得到很好的校正。空中對準的濾波狀態向量x為:
x=[φT(δvn)Tδp(εb)T(b)T]Tδp=[δLδλδh]T
(1)
根據捷聯慣導誤差方程和器件誤差參數模型,可列寫出降階空中對準的狀態方程為[7]:
(2)

以慣性導航系統與衛星導航系統的速度、位置差作為量測量,量測方程為:y=[δvnδLδλδh]T=[06×3I6×606×6]x+v
(3)
v為量測噪聲。式(2)和式(3)就組成了常用空中對準的降階卡爾曼濾波模型。
2 垂線偏差影響
垂線偏差是由于地球地表形狀不規則、地球內部質量分布不均勻等地理自然因素引起的實際重力方向與該位置點正常重力的小角度偏差。實際重力與正常重力的關系可表示為:
(4)
式中:δgn為重力擾動部分;η為卯酉面垂線偏差,繞北向軸為正;ξ為子午面垂線偏差,繞東向軸為正;式(2)中降階空中對準濾波模型速度誤差狀態并未考慮重力模型誤差影響,若考慮其影響相應的速度誤差方程為:
(5)
重力水平分量對導航解算的影響一定程度上可等效為加計零位誤差。地面靜止對準時等效的加計零位不變,對對準精度的影響可參考文獻[8-9]。垂線偏差隨著載體位置(緯度、經度、高度)變化,空中對準時與地面對準不一樣,載體位置變化較快,因此對準過程中垂線偏差在變化,會引對準過程中等效加計零位的變化,其中等效北向加計零位的線性變化影響航向對準精度。
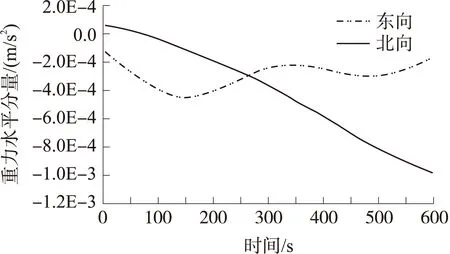
圖1 空中對準期間垂線偏差引起的水平重力分量
3 試驗測試及仿真分析
通過離線實測數據對比測試及誤差協方差仿真分析垂線偏差變化對空中對準航向誤差的影響進行分析。
3.1 試驗測試
為測試垂線偏差影響,選取某次咸陽-漢中航線試飛時垂線偏差變化較大區域的一段時間長度為600s的實測數據,數據包括原始400Hz慣性測量組件數據(角增量、速度增量)、衛星導航數據及其同步計數。試驗用慣導系統位置精度0.8nm/h(CEP),陀螺漂移重復性0.007 °/h,加計零位重復性3×10-5gn。試驗時載機飛行速度約220km/h,期間飛機基本處于平飛狀態。在沒有航線實測垂線偏差數據情況下,利用EGM2008(2 190階)全球重力場模型進行重力向量計算。EGM2008地球重力場球諧模型是美國國家宇航局于2008年公布,將階次完全至2 159(球諧模型的階擴展至 2 190,次擴展至2 159),空間分辨率提高到了9km,在分辨率和精度方面都有了很大的提高[10-11]。采用EGM2008重力模型計算得到垂線偏差引起的重力水平分量如圖 1所示。
由圖1可知,重力北向分量在對準過程中基本呈線性變化,在600s時間變化約-1×10-4gn。以地面EIA對準后導航解算的航向作為參考,采用傳統簡化重力模型(即不考慮垂線偏差)和EGM2008模型(考慮垂線偏差)進行空中對準的航向誤差比較如圖2所示。
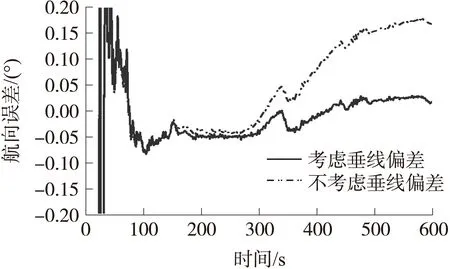
圖2 垂線偏差補償與否航向對準誤差比較
由圖2可知,不考垂線偏差比考慮垂線偏差航向對準誤差大約0.15°。補償垂線偏差后,系統航向對準誤差在0.05°以內,可滿足航空慣導位置誤差漂移率1.5nm/h(CEP)的應用要求。垂線偏差補償與否航向差約0.15度,相應數值與等效北向加計零位斜坡誤差造成的航向誤差相對應。
3.2 協方差仿真分析
誤差協方差仿真分析是評估降階卡爾曼濾波算法在真實環境下工作性能的有效方法[12]。協方差仿真提供了一種系統統計性能的仿真手段,通過協方差仿真可以避免通過大量的單次仿真進行統計而獲得系統性能的預估。通過協方差仿真可以評估在特定任務場景下各項誤差的貢獻,據此可分析哪些誤差在系統中是主要誤差源,并且在后續系統實現中通過技術手段予以降低,以獲得滿足需求的導航系統性能[13]。
協方差分析時,采用正常重力模型對重力進行補償。設計的15維降低濾波器如第2節所示。真實世界還包含重力模型誤差(垂線偏差引起)及其他慣性測量組件誤差狀態。
為模擬3.1節測試場景,仿真時假定垂線偏差引起的重力東向、北向分量模型為:
(6)
這里針對重力北向分量的線性變化影響進行分析,式(6)中gE,gN,α對應初始方差陣的初值取為0,β對應的初始方差陣取為(-1.0×10-3/600)2。
具體真實世界的慣性測量組件誤差狀態仿真參數列于表1。由于對準時間短,慣性測量組件誤差狀態按隨機常值建模。
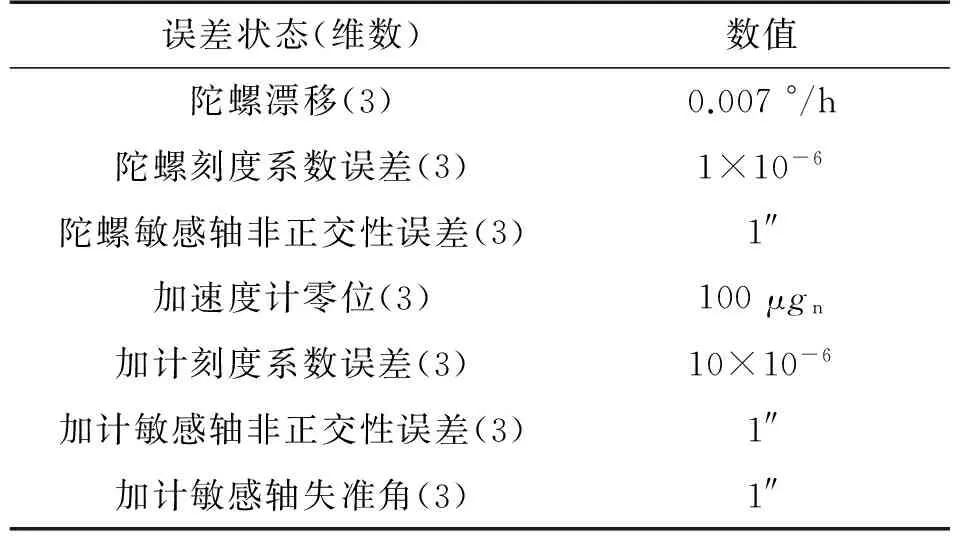
表1 真實世界慣性測量組件誤差狀態
真實世界在降階模型的基礎上增加仿真重力模型狀態及表1所示的其他誤差項,狀態為34維。降階空中對準濾波器的參數設置同真實世界。降階空中對準濾波算法自身估計的航向誤差(降階濾波器協方差陣對應元素的根號值)和其在真實世界中工作的航向誤差(協方差分析計算協方差陣對應元素的根號值)對比如圖3所示。
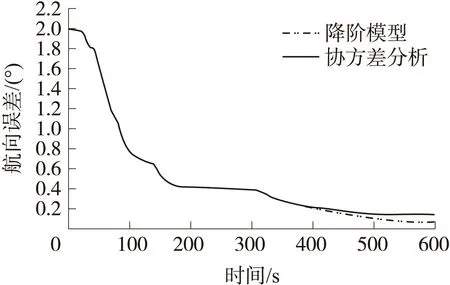
圖3 降階濾波器及真實協方差分析估計航向誤差對比
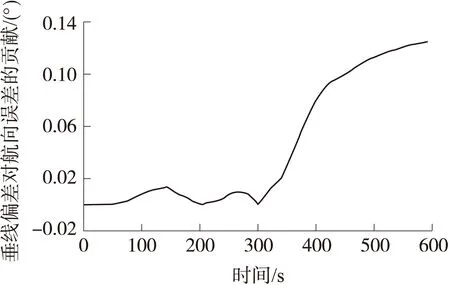
圖4 垂線偏差引起的航向誤差
由圖3可知,由于濾波模型偏差降階濾波器計算的方位角誤差過小,對其工作性能的估計過于樂觀,對比圖2可知真實誤差相對要大。相對的,降階空中對準模型在真實世界的協方差分析結果可以較真實的反映濾波器工作性能。進一步的,單獨協方差仿真了垂線偏差引起的航向誤差,仿真結果如圖4所示。
由圖3、圖4可知,垂線偏差對設定條件下空中對準航向誤差影響是主要,而其他慣性測量組件誤差是可忽略的。
4 結論
空中對準過程中垂線偏差變化的影響等效于加計零位變化,其中重力北向分量的線性變化將導致航向對準誤差。實測離線數據測試結果顯示采用EMG2008重力模型補償垂線偏差后,在垂線偏差變化較大空域內的空中對準航向精度明顯改善。誤差協方差仿真分析進一步驗證了在直飛情況下,垂線偏差變化率對航向誤差的影響相對其他未建模慣性測量組件誤差是主要的,對航向對準誤差影響較大,制約后續純慣性導航精度。因此在中高精度應用中為保證在不同空域內的空中對準精度考慮采用高精度重力場模型對垂線偏差進行補償是必要的。
[1] 趙忠,王鵬. 高精度慣性導航系統垂線偏差影響與補償[J]. 中國慣性技術學報,2013,21(6):701-705.
[2] 李姍姍,吳曉平,王凱. 擾動重力矢量對慣性導航系統的誤差影響[J]. 大地測量與地球動力學,2010,30(3):142-146.
[3] 翁浚,秦永元,嚴恭敏,等. 空中對準方案的誤差分配分析方法(英文)[J]. 中國慣性技術學報,2015,23(5):570-574.
[4] 朱長征,居永忠. 影響天文導航系統定位精度的兩個因素分析[J]. 宇航學報,2010,31(10):2309-2313.
[5] 梅春波,秦永元,游金川. SINS基于非線性量測的大失準角初始對準算法[J]. 宇航學報,2016,37(3):291-297.
[6] 夏家和,秦永元,游金川. 搖擺狀態下基于非線性誤差模型的慣導對準研究[J]. 宇航學報,2010,31(2):410-415.
[7] 秦永元. 慣性導航[M]. 北京:科學出版社,2006.
[8] Britting K R,Palsson T. Self-Alignment Techniques for Strapdown Inertial Navigation Systems with Aircraft Application[J]. Journal of Aircraft,1970,7(4):302-307.
[9] 吳楓,秦永元,周琪,等. 基于重力矢量積分的SINS對準算法誤差分析(英文)[J]. 傳感技術學報,2013,26(3):361-366.
[10] 劉曉剛,吳曉平,趙東明,等. EGM96和EGM2008地球重力場模型計算彈道擾動引力的比較[J]. 大地測量與地球動力學,2009,29(05):62-67.
[11] Simon A Holmes,Nikolaos K Pavlis,Steve C Kenyon,et al. The Development and Evaluation of the Earth Gravitational Model 2008(EGM2008)[J]. Journal of Geophysical Research:Solid Earth(1978-2012),2012,117(B4).
[12] Paul G Savage. Strapdown Analytics[M]. Maple Plain,Minn:Strapdown Associates,2000.
[13] Jay Farrell. Aided Navigation:GPS with High Rate Sensors[M]. Electronic Engineering New York:McGraw-Hill,2008.

夏家和(1981-),男,博士,中航工業自控所高級工程師,研究方向為捷聯慣導及組合導航,ftn2@163.com;

成果達(1988-),男,碩士,中航工業自控所工程師,研究方向為捷聯慣導,dhcgdc@126.com。
Study on the Influence of the Deflections of the Vertical on the In-Flight Alignment Heading Error*
XIA Jiahe*,CHENG Guoda,JI Cuiping
(AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China)
The influence of deflections of the vertical(DOV)on the in-flight alignment heading error is analyzed. Firstly,the reduced order in-flight alignment filtering model is presented,and the mechanism of the DOV influence on in-flight alignment heading error is analyzed. Then,comparative test are carried out by real off-line test data. Finally,the performance of the reduced order in-flight alignment filtering model is evaluated by error covariance analysis simulation. Off-line test and simulation results show that the heading error caused by DOV can reach 0.15°,which is main error source compared to other unmodeled IMU error under the given simulation condition. Employing a high-fidelity gravity field model to compensate the DOV error is necessary to ensure the in-flight alignment heading accuracy in different airspace.
strapdown inertial navigation;in-flight alignment;covariance analysis;DOV
項目來源:國家863高新技術計劃項目(2015AA2060)
2016-10-9 修改日期:2016-11-22
U666.1
A
1004-1699(2017)04-0566-04
C:7630;7230
10.3969/j.issn.1004-1699.2017.04.014
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
核科學與工程(2015年4期)2015-09-26 11:59:03