軀干不同負重方式對人體步行的生物力學影響
2017-04-12 12:48:24趙功赫曲峰楊辰萬祥林李秋捷
體育學刊 2017年2期
趙功赫+曲峰+楊辰+萬祥林+李秋捷
摘 要:研究軀干采用不同負重方式時人體行走的步態特征,探討軀干不同負重方式對步態的影響,為日常行走的負重方式的選擇或仿生機器人的設計提供參考。選用10名普通男性大學生為受試者,佩戴特制負重架,分別進行軀干基礎負重、軀干前負重和軀干后負重3種狀態下的行走,采用Kistler三維測力臺、Motion紅外高速運動捕捉系統同步采集運動學、動力學數據。結果顯示,在行走過程中與后負重相比,前負重顯著增加了步寬、重心的水平擺動幅度、踝最大背屈角度、最大伸髖角度、最大伸髖力矩、髖正功、最大伸膝力矩、膝負功,顯著減小了步長、軀干前后傾幅度、踝最大跖屈力矩。結論認為,人體前負重行走時,具有更小的步長和更大的步寬,會造成更多的能量消耗;軀干的向后傾斜,腰背部肌肉更容易疲勞,長此以往,更容易造成下腰痛的發生;同時,大腿肌肉用力增大,消耗更多的能量,長時間行走,大腿肌肉會更快疲勞;在設計前負重兩足步行機器人時也應適當調整相應參數,增大驅動力,滿足更多能量消耗。
關 鍵 詞:運動生物力學;負重方式;步行;軀干
中圖分類號:G804.6 文獻標志碼:A 文章編號:1006-7116(2017)02-0128-07
Biomechanical effects of different ways of trunk load bearing on human walking
ZHAO Gong-he,QU Feng,YANG Chen,WAN Xiang-lin,LI Qiu-jie
(Department of Sports Biomechanics,Beijing Sport University,Beijing 100084,China)
Abstract: In order to study the characteristics of the gait of human walking when the trunk is loaded in different ways, and to probe into the effects of different ways of trunk load bearing on the gait, the authors selected 10 ordinary university students as the testees, who wore a specially made load rack and walked respectively under such 3 conditions as trunk basic load bearing, trunk front load bearing and trunk back load bearing, used a Kistler 3D force measuring platform and an infrared high speed motion capture system to synchronously collect kinematic and dynamic data. The authors revealed the following findings: during walking, as compared with back load bearing, front load bearing significantly increased step width, horizontal swinging amplitude of center of gravity, maximum ankle dorsiflexion angle, maximum hip extension angle, maximum hip extension moment, hip positive work, maximum knee extension moment and knee negative work, and significantly decreased step length, trunk back and forth leaning amplitude, and maximum ankle plantar flexion moment. The authors drew the following conclusions: when walking with front load bearing, the human body has a smaller step length and a bigger step width, which will cause more energy consumption; the leaning backward of the trunk makes lower back muscles fatigue more easily, and tends to cause the occurrence of lower back pain and if it keeps happening; in the mean time, thigh muscles increase power exertion, consume more energy, fatigue faster when walking for a long time; when designing a biped walking robot with front load bearing, the designer should appropriately adjust corresponding parameters and increase driving power, so as to meet more energy consumption.
Key words: sports biomechanics;way of load bearing;walking;trunk
負重行走往往發生在人們的日常生活中,如上班、上學、登山、野外拓展、物品搬運、軍人行軍等。而負重行走時有負重物作用于人體,身體和重物的總質心必然會發生改變,從而人體會做出一系列的身體姿勢調整,來保持身體的平衡及穩定[1]。長期負重行走,易導致足底損傷、應力性骨折、下肢關節疼痛和腰背肌肉損傷等[2-4]。對不同負重方式步態變化研究,可以更深入認識脊柱的穩定控制機理以及下肢關節的力學行為,進而減少損傷[4-7]。
現在,很多搭地鐵、公交車的人,為了安全,會把雙肩背包反過來背,放在胸前,相當于軀干前負重,而長期胸前負重是否會對身體有所影響呢?近年,兩足步行機器人大量涌現,模仿人類對平衡穩定性的控制,機器人完成行走、站立等各種動作,均需要身體各部分的復雜配合;機器人在完成負重行走時,軀干和下肢的驅動模式也是不同的,比如胸前搬運重物行走、背負飛行器行走,而對人體負重行走的運動學和動力學分析,對于兩足步行機器人的設計具有重要意義。
目前,國內外關于人體負重行走的生物力學研究還多集中于背部負重行走,有關軀干前負重行走步態的研究較少。軀干前負重步行方式,為保持行走的平衡和穩定,其步態必然會做出相應調整。本研究旨在對軀干前、后負重方式下的步態特征進行生物力學分析,用可靠的運動學、動力學參數來評價兩種負重方式,一方面可以為仿生機器人的設計和控制提供依據,另一方面也對日常背包方式的選擇、登山拓展負重方式以及軍隊負重行軍等方面具有重要意義。
1 研究方法
1.1 受試者
10名普通男性大學生年齡:(22.8±1.9)歲;身高:(174.1±3.1)cm;體質量:(67.1±6.2)kg,均習慣穿歐碼42的鞋,實驗前24 h內未進行劇烈活動,且無神經系統和運動系統疾病。
1.2 數據采集與處理
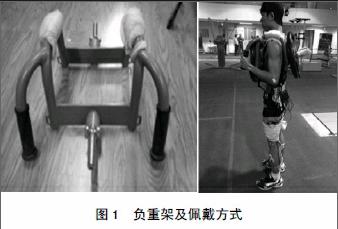
本研究通過特制的負重架來改變負重方式(見圖1)。負重架自重9.5 kg,前部扶手部位可固定受試者上臂運動,前后可固定杠鈴片以制造負重效果同時改變前、后負重方式。受試者分別完成基礎負重(僅佩戴負重架)、前負重(在負重架前方固定10 kg杠鈴片)和后負重(在負重架后方固定10 kg杠鈴片)3種方式行走。
采用8鏡頭紅外高速運動捕捉系統(Motion Analysis Raptor-4,USA,200 Hz)與三維測力臺(Kistler 9281CA,Switzerland,1 000 Hz)同步采集步行中的運動學、動力學數據。受試者身上共貼29個反光標志點(頭頂點、頭前和后點、右側肩胛下角、第4、5腰椎之間、兩側肩峰、兩側肱骨外上髁、兩側尺骨莖突和橈骨莖突中點、兩側大腿前側中部、兩側股骨外上髁、兩側股骨內上髁、兩側脛骨粗隆、兩側內踝、兩側外踝、兩側足尖和足跟)。
測試時,受試者佩戴負重架,雙手約束在前部扶手上,距離測力臺約10 m,聽到口令后受試者在規定速度下((1.5±0.2)m/s)自然走過測試區域(見圖2),通過便攜式測速系統(Newtest Powertimer,Finland)監控速度,兩個測速儀紅外發射裝置置于測力臺一側,二者間距3 m。在規定速度下,受試者以正常步態、無任何步伐調整并以左腳著在臺面上視為一次有效測試,按隨機順序完成3種負重方式下的測試,每種方式下采集3次有效數據。
采集的所有標志點三維坐標采用Butterworth低通濾波法進行平滑,截斷頻率10 Hz。數據用Cortex2.1.0.1103以及Microsoft Office Excel 2007、MATLAB R2009a等軟件進行計算處理。根據標志點坐標建立人體環節坐標系[8],其中膝關節轉動中心為股骨內外上髁中點,踝關節轉動中心為內外踝的中點,髖關節轉動中心根據Bell等[9]的研究計算獲得。采用歐拉角的方法計算髖、膝、踝的三維角度,采用逆動力學的方法[10]計算關節的三維凈力矩,其中人體慣性參數采用DeLeva[11]修正后的Zatsiorsky-Seluyanovs人體慣性參數。關節功率為關節凈力矩與關節角速度的乘積,采用梯形法計算關節功率對時間積分獲得關節功。對于下肢關節運動學、動力學參數,本研究僅分析人體矢狀面數據,對下肢動力學參數除以體重進行標準化處理,并對各指標按一個步態周期(左足跟著地到左足跟再次著地)進行標準化處理。
組間參數采用單因素重復測量方差分析進行比較,后續采用LSD檢驗方法,以P<0.05作為差異顯著性水平,所有數據應用SPSS17.0軟件分析。
2 研究結果
2.1 時空參數
前負重行走步長顯著小于后負重行走(P<0.05),步寬顯著大于后負重行走(P<0.05),約增加了41.76%,前負重和后負重行走時擺動相百分比顯著小于基礎負重行走(P<0.05),而前負重和后負重行走之間的擺動相百分比和支撐相百分比差異無顯著性(P>0.05)(見表1)。
2.2 重心運動特征
前負重行走時重心水平擺動幅度顯著大于后負重行走(P<0.05),前負重行走時重心左右擺動幅度顯著大于基礎負重行走(P<0.05),后負重行走時重心的上下擺動幅度顯著小于基礎負重行走(P<0.05),而3種狀態下行走,重心上下擺動幅度無顯著性差異(P>0.05)(見表2)。
2.3 軀干運動特征
前負重行走時軀干前后傾幅度顯著小于后負重行走(P<0.05),與基礎負重行走相比無顯著性差異(P>0.05),后負重行走時軀干的前后傾幅度顯著大于基礎負重行走(P<0.05),軀干旋轉幅度顯著小于基礎負重行走(P<0.05)(見表3)。
2.4 下肢運動學、動力學參數
1)前負重、后負重與基礎負重行走時踝關節在矢狀面的運動學、動力學參數檢測結果(見表4)表明,與后負重相比,前負重行走時,角度最小值(踝最大跖屈角度)顯著減小(P<0.05),角度最大值(最大背屈角度)顯著增大(P<0.05),力矩最大值(最大跖屈力矩)顯著減小(P<0.05);前負重、后負重行走與基礎負重行走相比,大部分指標表現出顯著性差異(P<0.05),但3種負重狀態下踝關節在矢狀面的活動幅度和力矩最小值(最大背屈力矩) 差異無顯著性 (P>0.05)。
不同負重狀態行走時踝關節在一個步態周期內的矢狀面角度、力矩、功率變化曲線如圖3所示。
力矩、功率(n=10人) 2)前負重、后負重與基礎負重行走時膝關節在矢狀面的運動學、動力學參數結果(見表5)表明,與后負重相比,前負重行走時,角度最大值(膝最大屈角)顯著增大(P<0.05),力矩最大值(最大伸膝力矩)顯著增大(P<0.05),膝關節功率最小值顯著增大(P<0.05),膝關節負功顯著增大(P<0.05);前負重、后負重行走與基礎負重相比,大部分指標表現出顯著性差異(P<0.05),但3種負重狀態下膝關節力矩最小值(最大屈膝力矩) 差異無顯著性(P>0.05)。
不同負重狀態行走時膝關節在一個步態周期內的矢狀面角度、力矩、功率變化曲線如圖4所示。
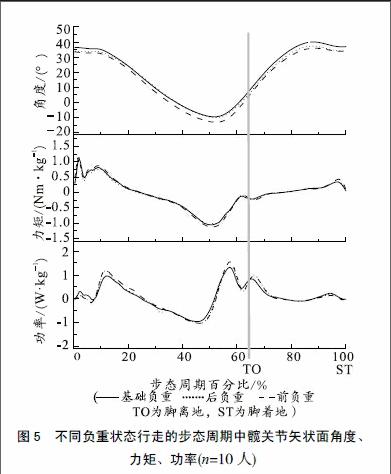
力矩、功率(n=10人) 3)前負重、后負重與基礎負重行走時髖關節在矢狀面的運動學、動力學參數結果(表6)表明,與后負重相比,前負重行走時,角度最大值(最大屈髖角度)顯著減小(P<0.05),角度最小值(最大伸髖角度)顯著增大(P<0.05),力矩最大值(最大伸髖力矩)顯著增大(P<0.05),髖關節正功顯著增大(P<0.05)。與基礎負重行走相比,前負重和后負重行走的角度最大值(最大屈髖角度)、髖關節活動幅度、功率最大值均顯著增大(P<0.05);與基礎負重行走相比,前負重行走的角度最小值(最大伸髖角度)顯著增大(P<0.05),而后負重行走的角度最小值(最大伸髖角度)無顯著性變化(P>0.05)。
不同負重狀態行走時髖關節在一個步態周期內的矢狀面角度、力矩、功率變化曲線如圖5所示。
3 討論
1)在本實驗中,前負重行走時,步長顯著減小,步寬顯著增大,步寬相比后負重行走與基礎負重行走分別增加了28.69%、32.50%,因為本研究控制了步速,受試者為了保持固定的行走速度,通過步長的減小和步寬的增大來提高行走的穩定性,而后負重行走與基礎負重行走在步長和步寬上差異沒有顯著性,說明后負重行走所帶來的人體失穩的效應不如前負重強。
Donelan[12]認為,更大步態參數的變化會導致更多的能量消耗,例如減小32%步寬變化率,將會減小5.7%的能量消耗,分析其原因,步寬變化率的增大會增大每一步之間的轉換所需要的能量,而積極的穩定需要適度的代謝成本。因此本實驗中,前負重行走時,更大的步寬意味著有更大的能量消耗。有文獻指出,步寬會隨著負重的增加而增加,以加強行走的穩定性,這與本實驗的研究結果相同。Menz[13]認為增大步寬可以避免將身體的線性動量轉化為角動量影響軀干的穩定性,保持平衡。因此在設計前負重機器人的時候,適當減小步長,增大步寬,可以提高步態的穩定性,同時應加大驅動力,滿足更多的能量消耗。Attwells等[14]通過實驗證實,較高的載荷會使步長減小,這與本研究結果基本相同,前負重行走時步長顯著小于基礎負重行走,后負重行走步長小于基礎負重行走,但不顯著,推測當后負重重量增加,差異就會更加明顯。也有學者認為負重對于步長的影響較小[15-16],這可能與本實驗對步速進行了控制有關。
前負重和后負重行走時支撐相百分比均大于基礎負重行走,表明負重這一干擾因素會造成支撐期的增長和擺動期降低,這與Charteris[17]的研究結果相同。這是因為人體在負重過程中隨著負重的增加,勢必會利用更多的支撐相來維持穩定,而減小擺動期,由于擺動期的比例降低,擺動腿加速擺動著地,勢必會造成步長的減小,這些變化使人體加快形成一個動態平衡體系。前負重和后負重的支撐相百分比沒有差異,說明這兩種負重狀態并不會造成支撐相和擺動相的改變。提示在機器人仿真研發中,負重增加時,應該相應延長支撐相,而前負重和后負重時,不用改變機器人的支撐相和擺動相。
2)在本實驗中,前負重行走會增大重心在水平面內左右方向的偏移,而后負重行走減小重心在水平面內左右方向的偏移,表明前負重行走時身體重心更趨于不穩,而在后負重行走時具有更強的穩定控制能力。分析其原因,可能是由于前負重行走時,軀干的旋轉幅度增大,從而造成了重心左右擺動增大,也可能是由于下肢各關節的角度、力矩發生改變,致使重心產生波動,還可能與下肢各關節額狀面和冠狀面的運動學、動力學參數的改變有關。
3)在本實驗中,軀干的不同負重方式造成了完全不同的軀干運動特征,前負重時,身體和負重物的總質心會向前方偏移,因此軀干通過后傾調整總質心位置,保持穩定,在本實驗中,前負重時軀干始終處于后伸位;而后負重相反。前負重行走時軀干的前后傾幅度顯著小于后負重,與基礎負重行走相比沒有差異,而后負重行走時軀干前后傾幅度顯著大于基礎負重行走。
Kinoshita[15]就不同負重方式對行走步態的影響研究發現,背部背包造成軀干更大的前傾,而軀干前后均勻負重可以大大減小不必要的前傾,并且更接近于正常行走,而本研究中前負重行走時軀干的前后傾幅度顯著小于后負重,更接近于基礎負重的行走,而后負重行走時軀干的前后傾幅度顯著大于基礎負重行走,這一結果,與Kinoshita就不同負重方式對行走步態的影響的研究結果一致。從解剖學的角度來分析,軀干后伸的能力本身就小于軀干前屈的能力,而前負重軀干又處于后伸位,因此相比后負重,軀干前后傾幅度會減小;另一方面,前負重時,軀干處于后伸位,此時軀干周圍肌肉收縮力更強,放電更多,具有更好地穩定控制能力,但長時間的話,軀干的肌肉更容易疲勞。
Zetterberg等[18]研究證明,軀干試圖前屈時主要是腹側肌活動較強,背側肌活動較弱;試圖后伸時背側豎脊肌活動最大,腹側肌也表現出一定的活動。范帥等[19]研究發現外部負荷大小、位置不同時,軀干的神經肌肉控制也會不同,負荷在身體前方時,腰背肌為主要做功肌,而負荷在身體后方時,腰背肌和腹肌的貢獻比率接近相等。因此,在前負重時,腰背肌為主要做功肌,更容易疲勞。本研究在前負重時,身體是處于后伸位的,黃強民等[4]研究軀干在不同位置下負重時的肌電活動發現,外部負重物的位置對軀干穩定性影響較大,尤其在身體后伸位時,負重增加,腰部閃動次數增多,更容易造成下腰痛的發生。
前負重時,軀干會有更大的后傾角度,而后負重時軀干會有更大的前傾角度,軀干角度的相應調整的目的,均是使其重心更加靠近支撐面中心,提高步態穩定性,同時也可減小外部負重物的偏心力矩的作用。這也說明軀干的前傾和后傾對于保持步態穩定性具有重要意義。這也提醒我們,當機器人在進行前負重或者后負重的行走時,需要軀干的運動特征進行相應的調整。
4)在本實驗中,前負重和后負重兩種行走模式之間比較下肢各個關節角度、力矩后發現,在支撐末期,外部力矩使踝關節背屈逐漸增大,因此踝關節內部產生逐漸增大的跖屈力矩與之對抗,此時踝關節的跖屈力矩與踝關節的跖屈肌結構的被動拉長有關,而前負重行走時,踝關節最大背屈角度顯著增大,最大跖屈力矩均顯著減小,說明踝關節周圍肌群收縮減弱。髖關節最大屈曲角度發生在擺動末期,隨后腳跟著地,髖關節產生伸肌力矩拉動身體質心向前,此時髖關節的伸肌力矩與髖關節伸肌的向心收縮有關,而前負重行走造成髖關節最大屈曲角度顯著減小、最大伸髖力矩顯著增大,說明伸髖肌群收縮加強。
關節凈力矩是與肌肉作用效果等效,肌力矩所做的功將影響系統的機械能,當關節凈力矩與關節角速度方向相同時關節功率為正值,肌肉向心收縮做正功,意味著能量被肌肉產生出來并向肢體傳遞;當關節凈力矩與關節角速度方向相反時關節功率為負值,肌肉離心收縮做負功,這時外力對肌肉所做的功為總功,意味著能量由肢體環節流向肌肉,被肌肉吸收。行走時負功主要使肢體在抵抗重力時吸收能量,正功使人體向前運動,不管是正功還是負功,肌肉收縮都要消耗能量。在支撐相的初期即足觸地的緩沖階段,外部力矩要讓膝關節屈曲的時候,膝關節內部產生一個很大的伸膝力矩,與關節角速度方向相反,膝關節周圍肌肉做負功吸收能量,前負重行走時的伸膝力矩最大值以及膝關節負功顯著大于后負重行走,這可能造成膝關節承受更大的沖擊力,膝關節損傷風險增大,同時伸膝肌群離心收縮更大,吸收更多能量,更容易疲勞。而在離地蹬伸階段,力是通過下肢各關節肌肉收縮釋放,肌肉做正功,其中髖關節做正功最多,釋放能量最多,貢獻最大。而前負重造成髖關節做正功顯著大于后負重行走,伸髖肌群收縮更大、用力更多,可能造成髖關節蹬伸肌群更容易疲勞。因此在設計前負重機器人的時候,應加大下肢的驅動力,滿足更多的能耗。
在設計前負重的機器人或者進行機器人前負重的時候,應該適當減小步長,增加步寬,軀干適當向后傾斜,從而增加穩定性,同時應加大下肢的驅動力,滿足更多的能量消耗。對比軀干前、后負重的步態,人體前負重行走時,具有更大的步寬,會造成更多的能量消耗;而軀干的向后傾斜,長時間下去,腰背部肌肉更容易疲勞,更容易造成下腰痛的發生;同時,大腿肌肉用力增大,消耗更多的能量,長時間行走,大腿肌肉會更快疲勞。因此,建議日常生活中負重盡量選擇在背部。
參考文獻:
[1] 宋麗華,陳民盛. 人體負重行走的生物力學研究及前景[J]. 中國組織工程研究與臨床康復,2011,15(41):7771-7777.
[2] 付茂柱. 新兵基礎訓練中下肢應力性骨折的防治對策探討[J]. 海軍醫學雜志,2007(3):237-238.
[3] 李壯志,陳玉娟,李立,等. 不同載荷書包對小學生身體姿勢及足底壓力的影響[J]. 中國學校衛生,2015,36(2):174-176.
[4] 黃強民,王鳳湖,范帥. 靜態姿勢下均勻負重和非負重時軀干和表面肌電活動[J]. 醫用生物力學,2012,27(4):369-374.
[5] 吳劍,李建設. 人體行走時步態的生物力學研究進展[J]. 中國運動醫學雜志,2002,21(3):305-307.
[6] 周有禮,周伯禧,游家源,等. 妊娠婦女步態的動力學分析[J]. 醫用生物力學,2001,16(2):65-69.
[7] 趙美雅,倪義坤,田山,等. 行走過程中不同背包負重方式對人體生理參數的影響[J]. 醫用生物力學,2015,30(1):8-13.
[8] KADABA M P,RAMAKRISHNAN H K,WOOTTEN M E. Measurement of lower extremity kinematics during level walking[J]. J Orthop Res,1990,8(3):383-392.
[9] BELL A L,BRAND R A,PEDERSEN D R. Prediction of hip joint centre location from external landmarks[J]. Human Movement Science,1989,8(1):3-16.
[10] FRANKEL B,BRESLER J P. The forces and moments in the leg during level walking[J]. Journal of Applied Mechanics,1950,72:26-27.
[11] DE LEVA P. Adjustments to Zatsiorsky-Seluyanov's segment inertia parameters[J]. J Biomech,1996,29(9):1223-1230.
[12] DONELAN J M,SHIPMAN D W,KRAM R,et al. Mechanical and metabolic requirements for active lateral stabilization in human walking[J]. J Biomech,2004,37(6):827-835.
[13] MENZ H B,LORD S R,FITZPATRICK R C. Acceleration patterns of the head and pelvis when walking on level and irregular surfaces[J]. Gait Posture,2003,18(1):35-46.
[14] ATTWELLS R L,BIRRELL S A,HOOPER R H,et al. Influence of carrying heavy loads on soldiers posture,movements and gait[J]. Ergonomics,2006,49(14):1527-1537.
[15] KINOSHITA H. Effects of different loads and carrying systems on selected biomechanical parameters describing walking gait[J]. Ergonomics,1985,28(9):1347-1362.
[16] MARTIN P E,NELSON R C. The effect of carried loads on the walking patterns of men and women[J]. Ergonomics,1986,29(10):1191-1202.
[17] CHARTERIS J. Comparison of the effects of backpack loading and of walking speed on foot-floor contact patterns[J]. Ergonomics,1998,41(12):1792-1809.
[18] ZETTERBERG C,ANDERSSON G B,SCHULTZ A B. The activity of individual trunk muscles during heavy physical loading[J]. Spine,1987,12(10):1035-1040.
[19] 范帥,黃強民,王鳳湖,等. 雙手提放前后重物時軀干肌肌電活動規律[J]. 醫用生物力學,2013,28(4):410-417.
