無(wú)人機(jī)改進(jìn)導(dǎo)航定位方法設(shè)計(jì)
2017-03-25 17:01:03唐婭娟王晶所玉君
科技與創(chuàng)新 2017年4期
關(guān)鍵詞:無(wú)人機(jī)
唐婭娟++王晶++所玉君


文章編號(hào):2095-6835(2017)04-0023-03
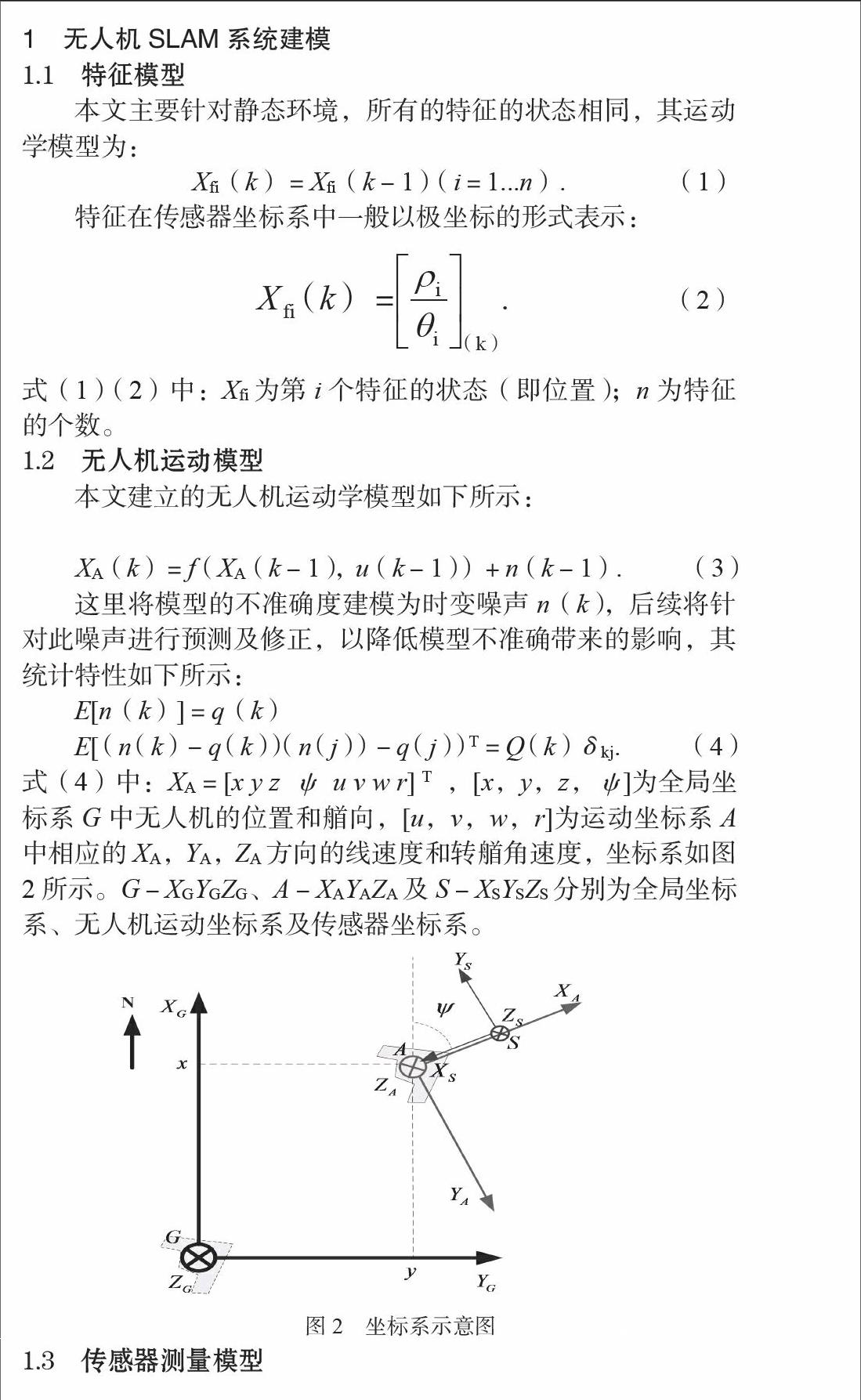
摘 要:針對(duì)無(wú)人機(jī)航位推算過(guò)程中由于傳感器精度限制及運(yùn)動(dòng)模型不準(zhǔn)確導(dǎo)致其位置估計(jì)誤差累積問(wèn)題,設(shè)計(jì)一種利用對(duì)地面路標(biāo)的觀測(cè)來(lái)修正自身位置的同步定位與構(gòu)圖方法,同時(shí)將模型不準(zhǔn)確建模為時(shí)變的過(guò)程噪聲,通過(guò)對(duì)過(guò)程噪聲統(tǒng)計(jì)特性的預(yù)測(cè)及修正來(lái)提高模型的準(zhǔn)確度。建立了特征模型、無(wú)人機(jī)運(yùn)動(dòng)模型及傳感器測(cè)量模型,利用試驗(yàn)數(shù)據(jù)對(duì)所提方法進(jìn)行了仿真驗(yàn)證,結(jié)果表明所提方法降低了模型不準(zhǔn)確對(duì)無(wú)人機(jī)導(dǎo)航定位精度的影響,在傳感器精度不高的情況下,降低了誤差累積程度,提高了無(wú)人機(jī)導(dǎo)航定位的精確性和魯棒性。
關(guān)鍵詞:無(wú)人機(jī);航位推算;時(shí)變?cè)肼暎煌蕉ㄎ慌c構(gòu)圖
中圖分類號(hào):TP242.6 文獻(xiàn)標(biāo)識(shí)碼:A DOI:10.15913/j.cnki.kjycx.2017.04.023
近年來(lái),無(wú)人機(jī)在軍事民事領(lǐng)域得到了越來(lái)越多的應(yīng)用,無(wú)人機(jī)的導(dǎo)航問(wèn)題是限制其發(fā)展的決定性因素,慣性導(dǎo)航、衛(wèi)星導(dǎo)航、地磁導(dǎo)航、航位推算及組合導(dǎo)航是目前常用的導(dǎo)航方法。慣性導(dǎo)航短時(shí)間內(nèi)精度較高,但是初始對(duì)準(zhǔn)困難;常用的衛(wèi)星導(dǎo)航為GPS導(dǎo)航,精度高,但是容易受到干擾;地磁導(dǎo)航全天時(shí)、全天候,但是需要存儲(chǔ)大量的地磁數(shù)據(jù),對(duì)計(jì)算機(jī)的存儲(chǔ)能力及數(shù)據(jù)處理能力要求高;航位推算造價(jià)低廉,是最為常用的方法,但是位置估計(jì)誤差隨時(shí)間迅速累積增長(zhǎng);組合導(dǎo)航即將上述方法中的2種或多種加以組合使用。
同步定位與構(gòu)圖(Simultaneous Localization and Mapping,SLAM)是一種新興的無(wú)人機(jī)導(dǎo)航定位技術(shù),國(guó)外學(xué)者對(duì)該方法已經(jīng)進(jìn)行了一系列研究,但是國(guó)內(nèi)對(duì)SLAM的研究相對(duì)于國(guó)外差距還很大,多數(shù)研究限制在移動(dòng)機(jī)器人領(lǐng)域。下面描述無(wú)人機(jī)SLAM方法的執(zhí)行過(guò)程。
飛行的無(wú)人機(jī)由于航位推算引入噪聲,或者由于建立運(yùn)動(dòng)模型的不準(zhǔn)確,位置估計(jì)誤差逐漸積累,導(dǎo)致無(wú)人機(jī)的航位推算誤差越來(lái)越大,如圖1(a)所示,橢圓越來(lái)越大,即無(wú)人機(jī)自身和地圖位置的不確定性越來(lái)越大。通過(guò)SLAM方法進(jìn)行導(dǎo)航定位的無(wú)人機(jī)通過(guò)對(duì)地圖中元素的反復(fù)測(cè)量,能夠修正自身的位置。當(dāng)無(wú)人機(jī)測(cè)量到一個(gè)新特征時(shí),首先需要通過(guò)數(shù)據(jù)關(guān)聯(lián)來(lái)判斷這個(gè)新觀測(cè)特征是否對(duì)應(yīng)著地圖中的已有特征,見(jiàn)圖1(b)。如果對(duì)應(yīng)著,則利用這次新測(cè)量來(lái)校正無(wú)人機(jī)自身及特征的位置,見(jiàn)圖1(c);否則,將這個(gè)特征構(gòu)建到地圖中。
(a)不確定性增長(zhǎng)
(b)新的測(cè)量 (c)位置校正
4 結(jié)論
建立了無(wú)人機(jī)的運(yùn)動(dòng)模型和觀測(cè)模型,設(shè)計(jì)了改進(jìn)的無(wú)人機(jī)同步定位與構(gòu)圖方法,將所建立運(yùn)動(dòng)模型的不準(zhǔn)確性建模為時(shí)變?cè)肼暎ㄟ^(guò)對(duì)其統(tǒng)計(jì)特性進(jìn)行估計(jì)校正來(lái)彌補(bǔ)模型構(gòu)建的不足,并利用試驗(yàn)數(shù)據(jù)對(duì)所提方法進(jìn)行仿真驗(yàn)證。結(jié)果表明,所設(shè)計(jì)方法在低傳感器精度的情況下相對(duì)于航位推算,定位精
度有大幅度提高,算法的可行性及有效性得到了驗(yàn)證,對(duì)于無(wú)人機(jī)執(zhí)行長(zhǎng)航時(shí)隱蔽作業(yè)具有一定的實(shí)際應(yīng)用意義。
參考文獻(xiàn)
[1]Durrant-Whyte H F,Bailey T.Simultaneous localization and mapping(SLAM):Part I,The essential algorithms.IEEE Robotics and Automation Magazine,2006,13(2):99-108.
[2]Bailey T,Durrant-Whyte H F.Simultaneous localization and mapping(SLAM):Part II,State of the art.IEEE Robotics and Automation Magazine,2006,13(3):108-117.
[3]Bailey T,Nebot E M,Rosenblatt J K,et al.Data association for mobile robot navigation:A graph theoretic approach[C]//Proceedings of the IEEE International Conference on Robotics and Automation San Francisco.USA:2000:2512-2517.
[4]Hahnel D,Thrun S,Wegbreit B,et al.Towards lazy data association in SLAM[C]//Proceedings of the International Symposium on Robotics Research.Sienna,Italy:2003:421-431.
[5]黃慶成,洪炳熔,厲茂海,等.基于主動(dòng)環(huán)形閉合約束的移動(dòng)機(jī)器人分層同時(shí)定位和地圖創(chuàng)建[J].計(jì)算機(jī)研究與發(fā)展,2007,44(4):636-642.
[6]張亮,蔣榮欣,陳耀武.移動(dòng)機(jī)器人在未知環(huán)境下的同步定位與地圖重建方法[J].控制與決策,2010,25(4):515-520.
[7]Smith R,Self M. Cheeseman P.Estimation uncertain spatial relationships in robotics [C]//Autonomous Robot Vehicles.New York:Springer-Verlag,1990:167-193.
〔編輯:劉曉芳〕
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國(guó)科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
