一種彈體初始掛裝姿態(tài)測量新方法
2017-03-09 02:45:13張虎龍
中國測試 2017年2期
關(guān)鍵詞:測量
張虎龍
(中國飛行試驗研究院,陜西 西安 710089)
一種彈體初始掛裝姿態(tài)測量新方法
張虎龍
(中國飛行試驗研究院,陜西 西安 710089)
在彈體掛裝試飛試驗科目中,需要地面靜態(tài)標定掛裝彈體的姿態(tài)。針對掛裝彈體無等高基準孔位的情況,提出一種基于旋轉(zhuǎn)矩陣分解的計算方法。該方法只要求測量彈體的基本幾何特征,綜合采用特征探測算法、空間基準對齊算法、奇異值分解算法進行處理計算;為保證姿態(tài)測量參數(shù)的精度,要求在彈體粘貼輔助圓形標志時,分布要均勻,數(shù)量適中,提高空間基準對齊算法的穩(wěn)健性。通過試驗分析,在無等高基準孔位的情況下,旋轉(zhuǎn)矩陣分解法能夠?qū)崿F(xiàn)姿態(tài)測量參數(shù)誤差小于0.3°,方法切實有效,結(jié)果準確可靠,滿足飛行試驗的精度要求。
彈體;姿態(tài)測量;旋轉(zhuǎn)矩陣;分解
0 引 言
掛彈飛行試驗前,在地面往往需要對導彈的慣導相對機體主慣導的位姿關(guān)系進行高精度的標定,標定結(jié)果將作為兩者的初始安裝誤差,用于機動飛行時慣導基準傳遞的修正值。在工程中,導彈慣導相對機體主慣導的位姿關(guān)系可由彈體掛裝后在飛機基準下的位姿關(guān)系表達[1]。彈體掛裝姿態(tài)測量常用的方法是掛裝前,要求設(shè)計單位對彈體的水平和垂直等高點進行高精度標定[2];掛裝后,利用三維坐標測量設(shè)備對彈體等高點進行測量,計算掛裝姿態(tài)角度。但在實際工作中,由于設(shè)計單位提供的彈體幾何特征不包括等高點,上述方法則會失效。針對此種情況,本文提出了一種新的姿態(tài)測量方法——旋轉(zhuǎn)矩陣分解法,其基本原理是基于彈體已有的幾何特征參數(shù),建立彈體坐標基準;然后,利用三維坐標測量設(shè)備測量彈體幾何特征在機體坐標基準下的特征參數(shù);基于彈體特征的兩套參數(shù),建立彈體坐標基準與機體坐標基準的空間轉(zhuǎn)換關(guān)系,計算旋轉(zhuǎn)矩陣;對旋轉(zhuǎn)矩陣進行分解,獲取彈體的掛裝姿態(tài)角。
1 系統(tǒng)設(shè)計及原理
1.1 系統(tǒng)設(shè)計
彈體測姿系統(tǒng)主要由全站儀、影像測量設(shè)備、工作站及其相應附件組成,如圖1所示。
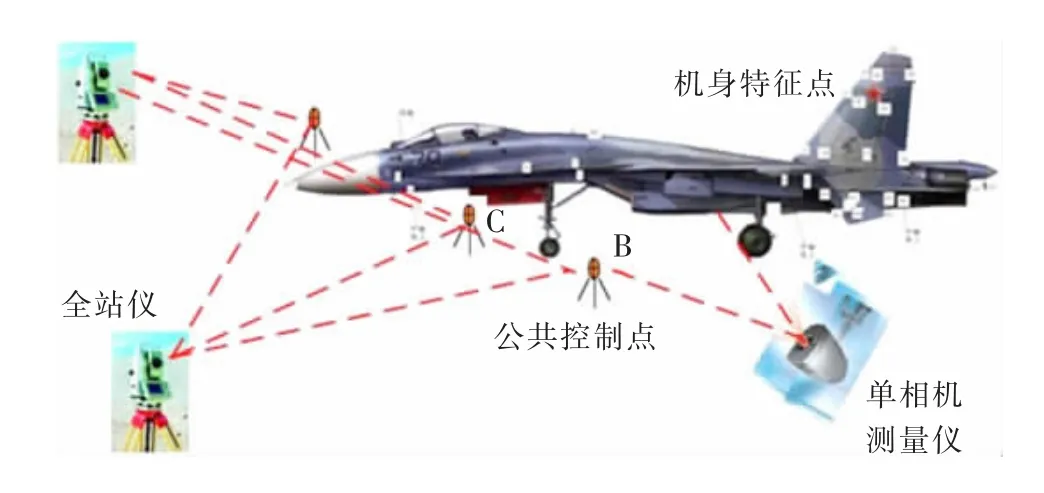
圖1 測量現(xiàn)場示意圖
1)全站儀:構(gòu)建飛機機體坐標系,建立機體坐標基準并測量彈體附加標志。
2)單相機測量儀:測量彈體特征及附加標志,建立彈體坐標基準。
3)工作站:主要用于數(shù)據(jù)的實時數(shù)據(jù)處理與分析。
1.2 測量原理
1.2.1 坐標系與姿態(tài)角參數(shù)定義
在彈體測量過程中,需要建立兩種空間坐標系:
1)彈體坐標系:以彈的質(zhì)心為原點,彈體縱軸為Zb軸,在彈的水平面內(nèi),垂直Z軸向右為Xb軸,按右手定則確定Yb軸,如圖2,坐標系O-XbYbZb。
2)機體坐標系:以飛機的質(zhì)心為原點,飛機縱軸為Z軸,在飛機的水平面內(nèi),垂直Z軸向右為X軸,按右手定則確定Y軸,如圖2,坐標系O-XYZ。
彈體掛裝姿態(tài)參數(shù)[3](見圖2)定義如下:
1)偏航角α:Xb軸在XZ坐標面上的投影與X軸的夾角。
2)俯仰角ω:Xb軸與XZ坐標面之間的夾角。
3)橫滾角κ:Y軸在YbZb坐標面上的投影與Yb軸的夾角。
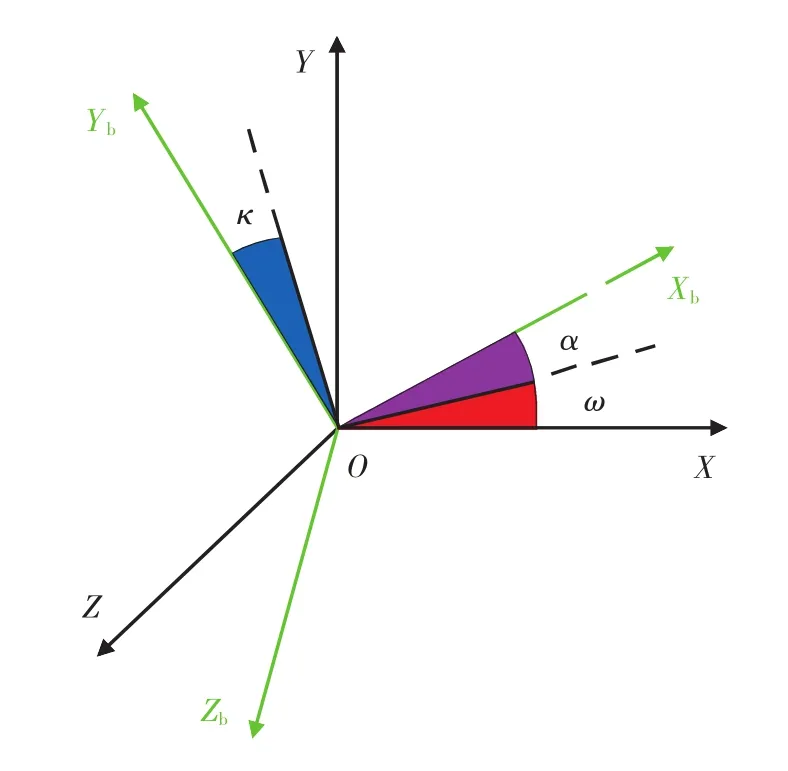
圖2 姿態(tài)定義示意圖

圖3 機體坐標系建立示意圖
1.2.2 機體坐標系與彈體坐標系建立
1)機體坐標系建立
為了建立高精度的機體坐標基準,采用基于測角的空間交會的方法進行[4]。
利用空間交會法測量飛機縱軸上兩點A和B,如圖3所示。計算矢量BA在設(shè)備坐標系 (黑色部分)下的方位角θ,然后,將設(shè)備坐標系方位零位旋轉(zhuǎn)至矢量BA方向,原點定于縱軸點A或B[5]。
2)彈體坐標系建立
利用相機結(jié)合測量桿的攝影測量方法[6],探測彈體的圓柱面和吊掛面[7],基于3-2-1坐標系法構(gòu)造彈體坐標系[8]。將圓柱面的對稱軸作為彈體的X軸,吊掛面的法向作為Y軸,利用右手定則確定Z軸。
①圓柱面探測算法
圓柱面上的任意一點Pi(xi,yi,zi)到軸線的距離都為半徑R。若中心軸線方向向量為(a,b,c),軸線上起始點為P0(x0,y0,z0),則實測半徑:


誤差方程為

其中ν為坐標觀測值殘差,引入兩個約束條件:
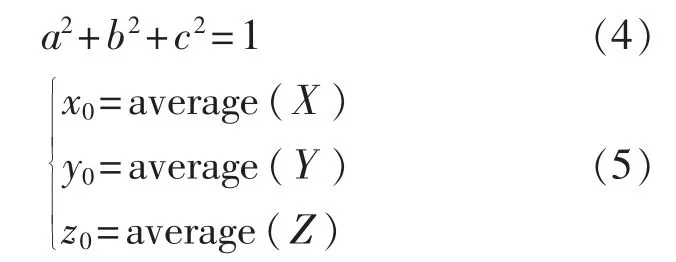
式(3)中x0,y0,z0為利用圓柱面上點計算的重心坐標值,由式(3)、式(4)和式(5),按照最小二乘法進行約束平差,得到圓柱面參數(shù)。
②平面探測算法
平面的一般數(shù)學表達式為Ax+By+Cz+D=0(C≠0),參數(shù)表達式為x=xi+at;y=yi+bt;z=zi+ct;把參數(shù)表達式帶入一般表達式中,得到t=a1xi-b1yi-c1zi-d1;若觀測n個測量點,使n個測量點到平面的距離平方和最小的 a1,b1,c1,d1,即是所要求的平面參數(shù)[9]。 建立誤差方程ν=AX,然后對ATA進行奇異值分解,最小奇異值對應的奇異值向量即是法向量(a,b,c),則平面方程為

1.2.3 旋轉(zhuǎn)矩陣分解法
對于機體坐標系,若依次繞Y軸旋轉(zhuǎn)α,再繞X軸旋轉(zhuǎn)ω,繞Z軸旋轉(zhuǎn)κ,即可實現(xiàn)飛機機體坐標系向彈體坐標系的坐標系對齊[10];反之,若利用對齊算法建立轉(zhuǎn)換關(guān)系,可間接反求3個姿態(tài)角;其中,各角度旋轉(zhuǎn)正方向定義為從坐標系原點沿各軸正向觀察時逆時針旋轉(zhuǎn)方向。
對齊算法模型采用三維赫爾墨特法,間接反求旋轉(zhuǎn)矩陣[11]。由旋轉(zhuǎn)矩陣分解出彈體的掛裝姿態(tài)參數(shù)α,ω,κ,分解法具體實現(xiàn)如式(7)、式(8)。

2 試驗驗證
本次試驗的被測對象為掛裝的氣象傳感器,傳感器上有等高點(基準孔位),并粘貼圓形標志,分別采用常規(guī)計算方法與旋轉(zhuǎn)矩陣分解法計算傳感器掛裝姿態(tài),分析對比驗證旋轉(zhuǎn)矩陣計算法的有效性。
2.1 測量過程
1)利用全站儀建立機體坐標基準,并測量傳感器已標定的等高點。
2)利用相機測量設(shè)備,采用圓柱面探測法與平面探測法,構(gòu)建傳感器坐標系;高精度測量傳感器上粘貼的圓形標志點,獲取其在傳感器坐標系下的坐標值。
3)同樣,利用全站儀依次測量粘貼的圓形標志點,獲取其在傳感器坐標系下的坐標值。
2.2 計算方法
1)常規(guī)計算法
利用表1數(shù)據(jù),采用常規(guī)測量方法[8]進行計算,結(jié)果如下:
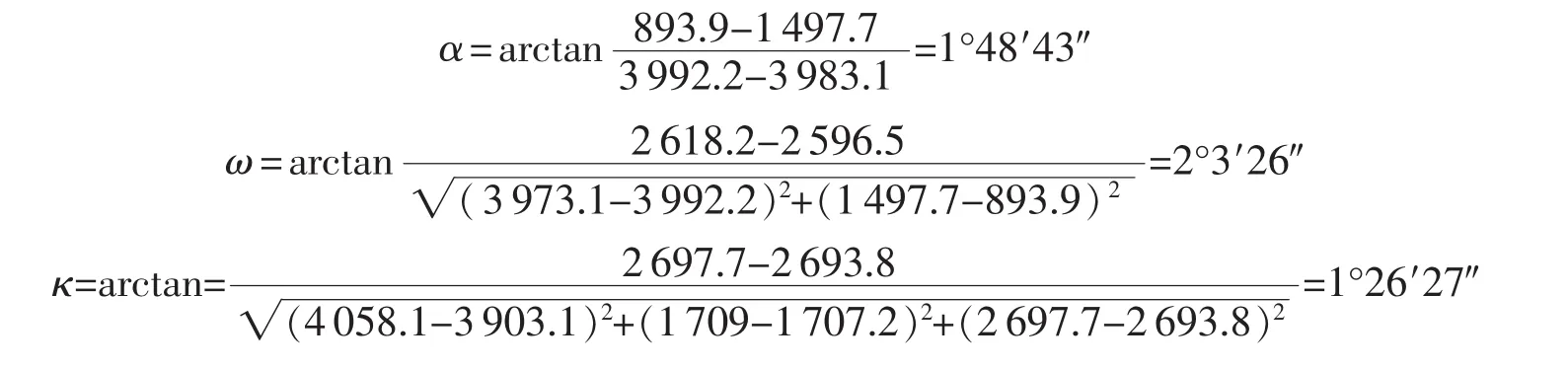
2)旋轉(zhuǎn)矩陣分解法
利用表2數(shù)據(jù),采用三維赫爾墨特法計算旋轉(zhuǎn)矩陣為

按照式(7)和式(8)分解計算姿態(tài)角

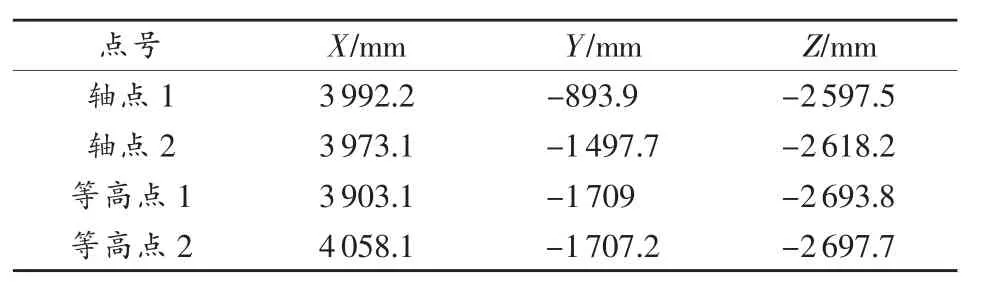
表1 基準孔位坐標
3)誤差分析
矩陣分解法的誤差主要體現(xiàn)在兩個方面:傳感器坐標系的構(gòu)建誤差和旋轉(zhuǎn)矩陣的計算誤差。
以基準孔位建立的坐標系為標準,檢核探測法建立的坐標系誤差。利用表1與表3中4組對應點數(shù)據(jù),對X,Y,Z 3個方向分別求取中誤差為(0.25,0.13, 0.11),綜合誤差
利用三維赫爾墨法反算的旋轉(zhuǎn)矩陣計算標志點的設(shè)備坐標值,將其與實測坐標值作差,如表4所示,誤差小于0.2mm,計算方法同M構(gòu)。
結(jié)合該案例分析,矩陣分解法引起的點位誤差約為0.2+0.3=0.5(mm);從常規(guī)測量方法與旋轉(zhuǎn)矩陣分解法的計算結(jié)果對比可以看出,由點位誤差引起的偏航角誤差Δα=αch-αx=13′26″,俯仰角誤差Δω=ωchωx=4′,橫滾角誤差Δκ=κch-κx=15′44″。該案例中傳感器尺寸與日常測試任務中掛裝彈體尺寸相當,因此,在彈體掛裝試驗中,采用矩陣分解法,姿態(tài)角誤差小于0.3°。

表2 圓形標志點坐標
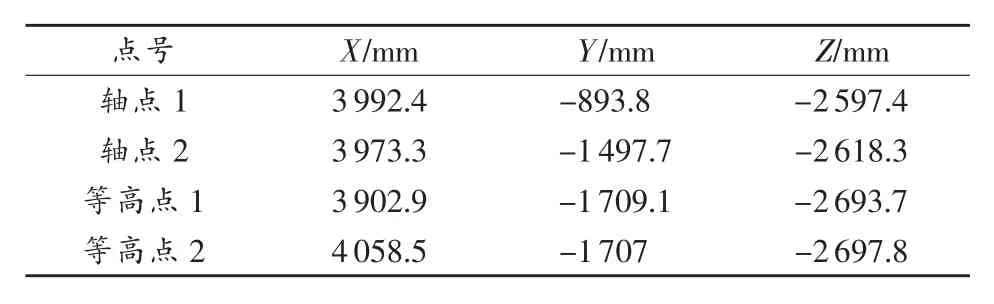
表3 探測法測量基準孔位坐標

表4 基于旋轉(zhuǎn)矩陣的坐標反算值與實測值對比
3 結(jié)束語
彈體初始掛裝姿態(tài)測量是掛彈試飛前必做的一項地面標定工作。本文結(jié)合工作實際,針對彈體無基準孔位的情況下,提出了一種基于旋轉(zhuǎn)矩陣分解彈體姿態(tài)參數(shù)的計算方法,分析表明:1)矩陣分解法是基于彈體坐標系與機體坐標系的空間轉(zhuǎn)換關(guān)系進行間接求取,現(xiàn)場作業(yè)具有較強的靈活性;2)傳感器坐標系的構(gòu)建誤差直接影響矩陣分解法的最終誤差,因此,在測量時,需做好坐標系的構(gòu)建工作,特別是圓形標志點的空間布局要均勻,且具有一定的密度;3)為提高精度,在測量輔助圓形標志時,應使用單相機加編碼點測量法,交會角度在60°~100°之間;4)矩陣分解法姿態(tài)角度誤差小于0.3°,測試方法正確有效,滿足飛行試驗的精度要求。
[1]鄭辛,武少偉,吳亮華.導彈武器慣導系統(tǒng)傳遞對準技術(shù)綜述[J].導航定位與授時,2016,3(1):1-7.
[2]張虎龍,李娟妮.機載火控雷達天線陣面安裝誤差的高精度校準方法[J].現(xiàn)代電子技術(shù),2011,34(19):4-8.
[3]張力軍,張士峰,楊華波.基于歐拉角觀測模型的航天器姿態(tài)確定方法[J].國防科技大學學報,2012,34(6):84-88.
[4]惠廣裕,武瑞娟.利用雙經(jīng)緯儀高精度標定機載雷達天線陣面[J].地理空間信息,2015,13(3):36-38.
[5]武瑞娟,左澤敏,冀芳.一種飛機結(jié)構(gòu)變形測量的新方法[J].科學技術(shù)與工程,2015,15(7):265-269.
[6]何紅麗,陳茜,趙靜.一種高精度飛機形變測量方法[J].測控技術(shù),2014,33(4):16-18.
[7]譚昌柏.逆向工程中基于特征的實體模型重建關(guān)鍵技術(shù)研究[D].南京:南京航空航天大學,2006.
[8]王麗秀.飛機柔性裝配制孔設(shè)備的工件坐標系建立方法[J].機械設(shè)計與制造,2012(4):229-231.
[9]侯海嘯,惠廣裕,吳衡.飛行試驗機體受載變形靜態(tài)檢測技術(shù)[J].測控技術(shù),2011,30(1):149-152.
[10]馮文灝.近景攝影測量[M].武漢:武漢大學出版社,2002:59-71.
[11]李國棟,趙威,田國會.一種基于旋轉(zhuǎn)矩陣分解的視覺伺服控制算法[J].山東大學學報,2012,42(1):45-49.
(編輯:李剛)
A new method for measuring the pose of projectile body in initial hanging
ZHANG Hulong
(Chinese Flight Test Establishment,Xi’an 710089,China)
In the missile body flight subjects hanging test,the pose of the missile body needs to be calibrated on the ground.Under the condition of no same high datum hole,a method based on the decomposition of the rotation matrix is proposed.The method only requires the measurement of the basic geometric characteristics of the projectile;the feature detection algorithm,the spatial datum alignment algorithm,and the singular value decomposition algorithm are used comprehensively to deal with the computation;through experimental analysis,the rotation matrix decomposition method can achieve pose parameter accuracy above 0.3°under the condition of no same high datum hole. In order to ensure the accuracy of measurement of pose parameters,the method requires auxiliary circle mark pasted in the projectile,even distribution,moderate number,and improves the robustness of the spatial reference alignment algorithm.The actual test proves that the method is effective,accurate and reliable and fully meets the precision requirements of such tests.
projectile;pose measurement;rotation matrix;decomposition
A
:1674-5124(2017)02-0025-04
10.11857/j.issn.1674-5124.2017.02.005
2016-07-20;
:2016-09-05
張虎龍(1979-),男,湖南岳陽市人,高級工程師,研究方向為光電測試、信息融合、目標跟蹤技術(shù)等。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
