智能球鉸鏈空間磁場分布仿真及其影響分析
2017-03-09 02:45:33楊文國胡鵬浩黨學明
中國測試 2017年2期
楊文國,胡鵬浩,黨學明
(合肥工業大學儀器科學與光電工程學院,安徽 合肥 230009)
智能球鉸鏈空間磁場分布仿真及其影響分析
楊文國,胡鵬浩,黨學明
(合肥工業大學儀器科學與光電工程學院,安徽 合肥 230009)
智能球鉸鏈中球頭周邊磁場分布對其測量范圍和分辨率有直接的影響。該文設計一種新的結構形式,采用多個永磁體和多個磁效應傳感器沿球面陣列布置的方案改善測量分辨率,給出其理論模型和新的數值積分算法。Maxwell軟件的仿真結果證實理論模型的正確性,并運用理論建模完成相應的理論分析,得出永磁體和傳感器的最佳空間位置匹配,對于進一步提高智能球鉸鏈的分辨率和精度有重要意義。
霍爾傳感器;球鉸鏈;永磁體;測量分辨率
0 引 言
精密球鉸鏈在并聯機構機器人中用途甚廣[1-3],在其被動運動過程中,其回轉方位及回轉角度無法自動獲得,為此本課題組提出了一種基于磁效應的智能球鉸鏈:在球頭內嵌入永磁體、在球窩內嵌入霍爾傳感器陣列,當球頭在球窩內轉動時,其周邊磁場也跟隨轉動,霍爾傳感器陣列獲取磁感應強度的變化,然后反算出球頭在空間的位姿[4-7]。前期的研究發現采用單個永磁體嵌入球頭,樣機的測量精度和分辨率很低,且隨回轉角度變大測量誤差增加[8-9]。究其原因是單個永磁體在球頭周圍產生的磁感應強度偏低,且變化平緩,不利于提高測量精度和分辨率,為此開展了多個永磁體和多個磁效應傳感器結合的測量模式,以提高智能球鉸鏈的性能。
1 模型建立
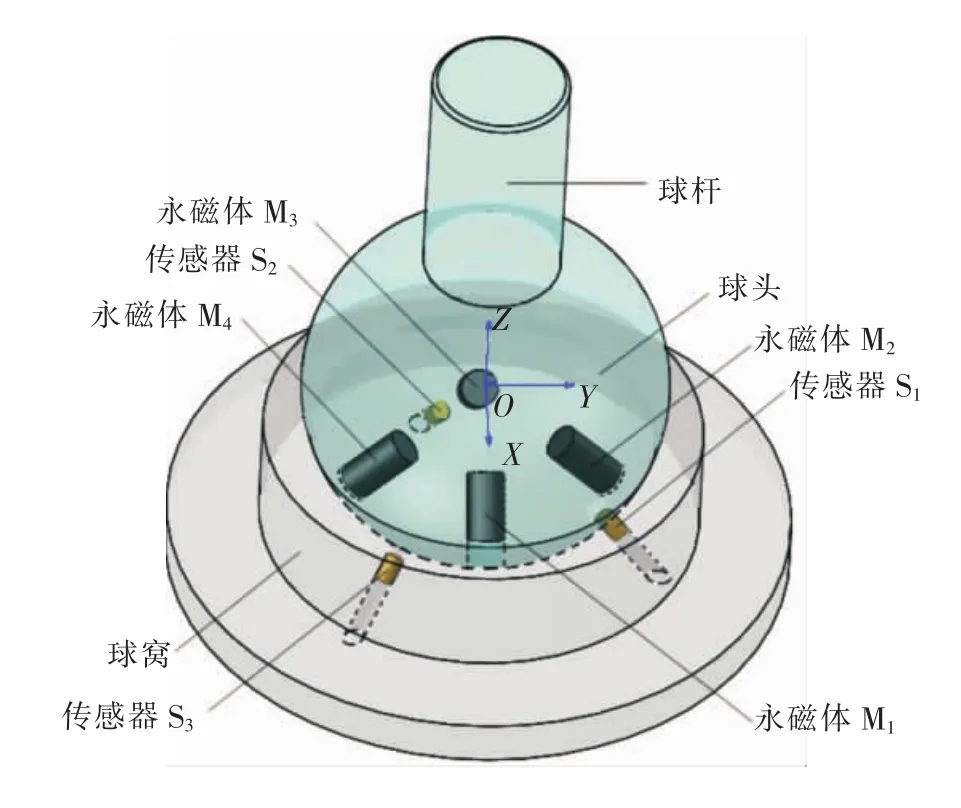
圖1 永磁體和傳感器空間位置結構圖
永磁體陣列和傳感器組合模型的空間結構如圖1所示,4個同樣規格的圓柱永磁體嵌入在球頭內、3個霍爾傳感器嵌入在球窩中,它們的軸線均穿過球鉸鏈的球心,永磁體M1的軸線在XOZ平面內,俯視XOY平面,從X軸正方向開始逆時針每隔90°分別是永磁體M1、M2、M3和M4,所有永磁體半徑為R0,長為L,沿軸向均勻充磁且S極指向球心,N極指向外側。為避免球頭周圍磁場出現完全對稱現象,永磁體M1的安裝半徑和其他3個永磁體不同。
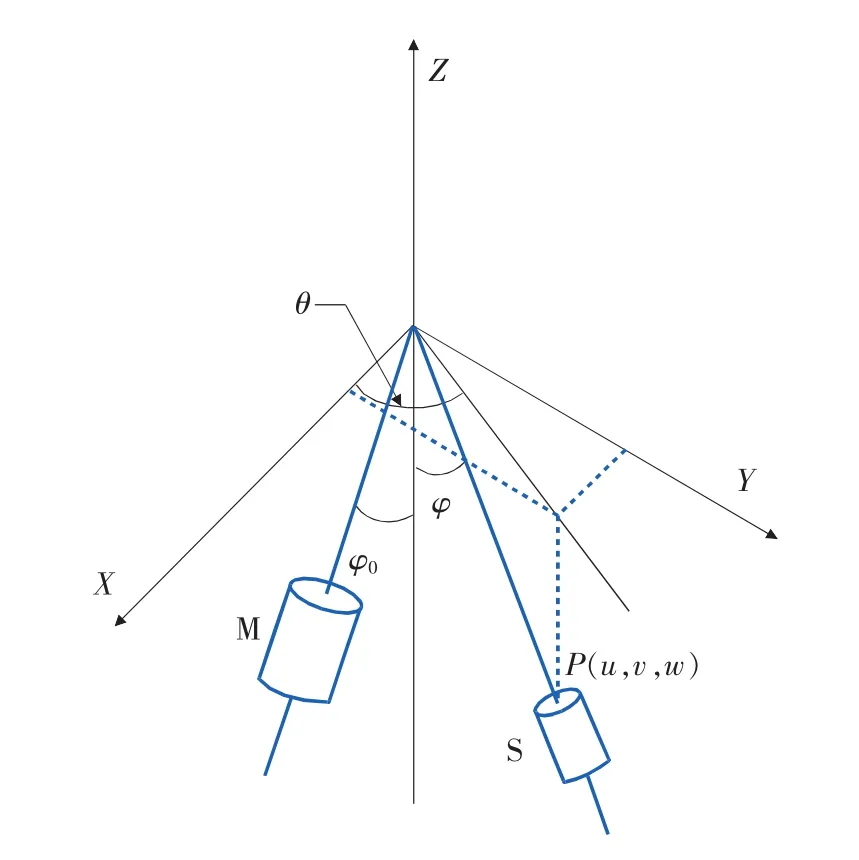
圖2 永磁體和傳感器空間位置模型圖
永磁體和傳感器空間位置模型如圖2所示,永磁體軸線與坐標軸Z軸負方向夾角為φ0,傳感器軸線與Z軸負方向夾角為φ,其在XOY平面上投影與X軸在該平面上沿逆時針方向夾角為θ。
在此采用等效磁荷法計算永磁體周圍的磁場[10-11]。以永磁體M1為例,計算其在傳感器S所處位置P點的磁感應強度分量Bx1、By1和Bz1,如式(1)~式(3)所示。
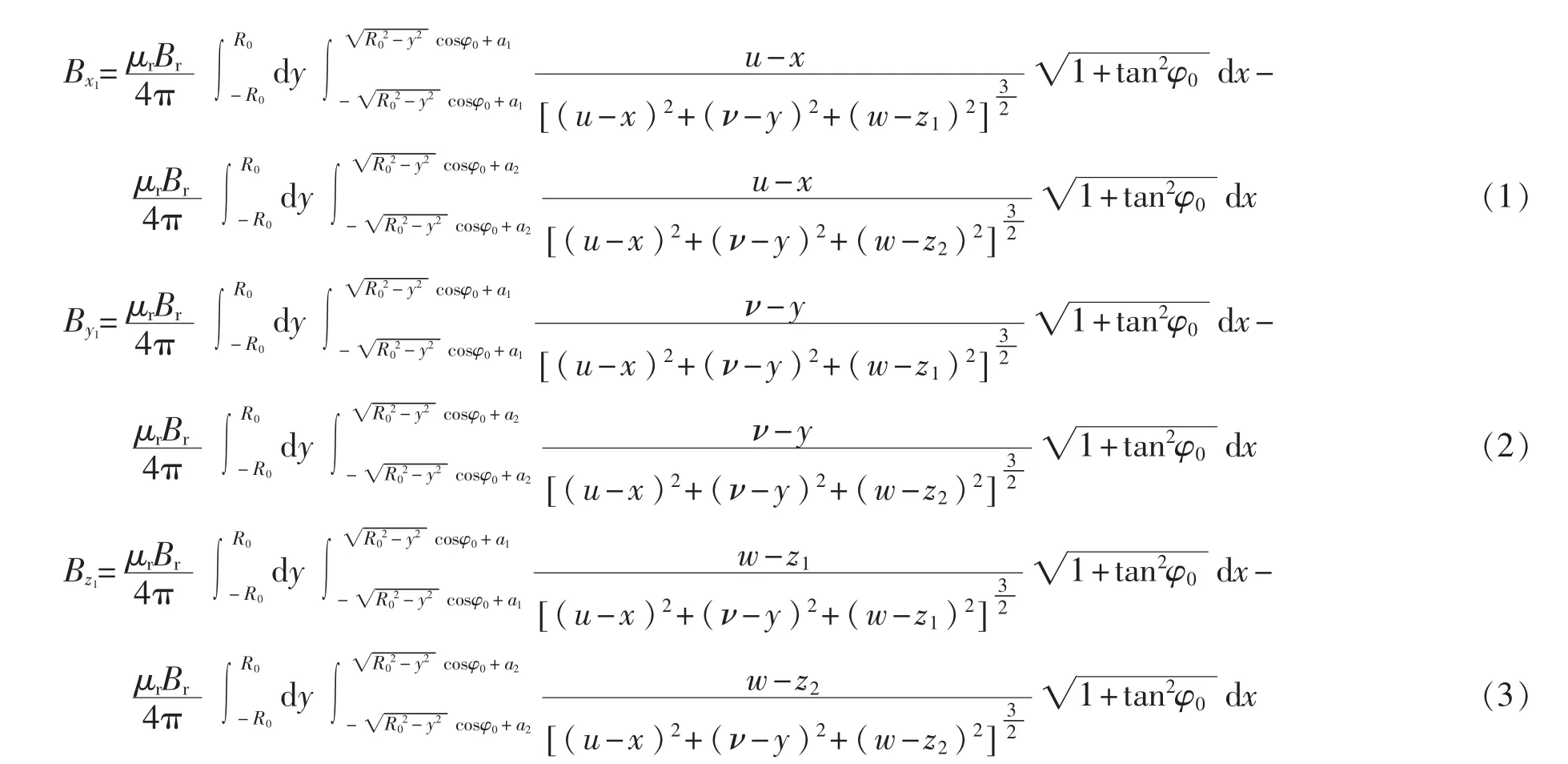
μr——永磁體的相對磁導率;
Br——永磁體的剩磁;
R1、R2——永磁體M1的N、S極端面到原點的距離;
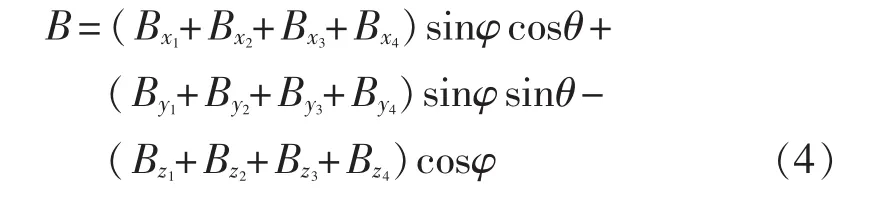
a1、a2——永磁體M1的N、S極端面圓心橫坐標。同樣的方法可以得到永磁體M2、M3和M4在P點處的磁感應分量Bz4。在4個永磁體同時作用下,P點處的磁感應強度值將會疊加[12-13],霍爾傳感器檢測到的磁感應強度值是沿球頭徑向方向的分量,由傳感器外指向內為正,反之為負,疊加磁感應強度計算公式為
在采用Matlab積分算法具體計算空間一點沿球面徑向方向上的磁感應強度分量時,通過對不同的數值積分算法運算對比,綜合考慮積分的精度、計算速度和準確性,選取quadgk函數作為第1積分函數,quadl函數為第2積分函數來完成。
2 Maxwell軟件仿真與模型驗證
2.1 Maxwell軟件仿真模型建立
在此用電磁場軟件仿真來驗證理論模型的正確性。電磁場常用的數值計算方法主要有時域有限差分法、矩量法和有限元法[14],結合本模型綜合考慮,選用Ansoft Maxwell軟件進行仿真。所訂制的永磁體是燒結釹鐵硼N35,半徑4 mm,長15 mm,剩磁3.5T,相對磁導率1.1,永磁體軸線與Z軸負方向夾角為30°,要使球頭周圍磁場變化劇烈,永磁體應盡可能地靠近球面放置,綜合考慮球頭尺寸(半徑為40 mm)以及4個永磁體的裝配,確定永磁體M1的S極端面到球心距離為19 mm,其他3個永磁體為24 mm。為了更好地對比 Matlab理論計算值和Maxwell仿真值,在模型外構建了必要的驗證線段,所有驗證線段的起點均在球頭表面上,長度為30mm且沿球頭徑向放置。
2.2 仿真結果及模型驗證
在Maxwell中計算區域的選取對仿真結果有一定影響,通常計算區域取理論模型的3~5倍。取永磁體組邊界的4倍作為計算區域邊界,通過Maxwell中calculator計算,得到4個永磁體疊加磁場在傳感器所在球面(距離球心半徑為42mm)法向的磁感應強度值如圖3所示,球面上每個小格表示經度10°和緯度5°的角度范圍。
從圖中可知,傳感器所在球面下半球的磁感應強度總體變化明顯,呈不對稱分布,有利于提高智能球鉸鏈的分辨率。通過Maxwell軟件中calculator計算得到所有驗證線段上各點的徑向磁感應強度分量值和用數學模型經Matlab數值計算的值對比,如圖4所示。仿真值和理論值在數值大小和變化趨勢上相吻合,說明所改進的模型在理論上是正確的,后續的分析、設計均以此為理論基礎。
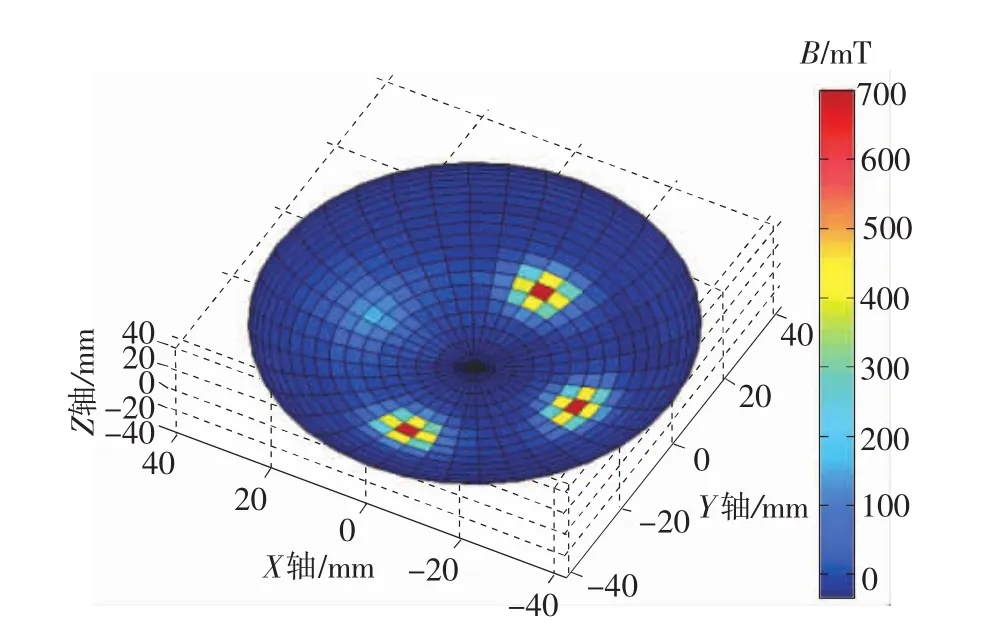
圖3 傳感器所在球面法向磁感應強度分布圖
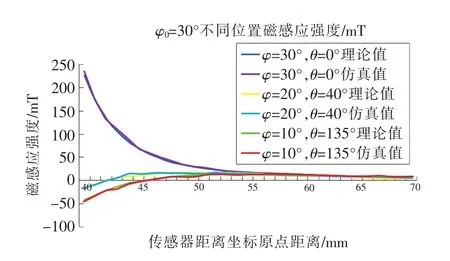
圖4 磁感應強度仿真值和理論值
3 永磁體及傳感器的最佳空間位置
為滿足球頭周圍磁場變化劇烈和傳感器測量范圍盡可能大,首先需要確定出該規格永磁體在模型中的最佳擺放位置,在此前提下再確定傳感器的最佳擺放位置。Maxwell的仿真值受仿真模型的影響比較大,其計算結果可以用來驗證理論模型,但用來探究球頭周圍的磁場變化卻存在不足,使用理論模型計算更準確和方便。在此采用Matlab計算傳感器所在球面的法向磁感應強度值,通過對計算結果的觀察分析,取傳感器不同位置相應角度的磁感應強度值作圖,如圖5所示。
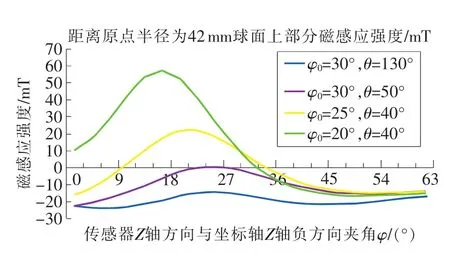
圖5 傳感器所在球面上的法向磁感應強度
從圖中可以看得出,球面上的磁感應強度在φ0不超過30°范圍內、φ從9°到38°的區間中變化比較劇烈,而當φ0為30°時,磁感應強度在φ較小和較大的部分區域內變化卻不太明顯;當φ0為25°和20°時,磁感應強度在φ較大時變化也不太明顯,后者的不明顯區域更大一些。由此可知,若使球頭周圍盡可能大的空間內磁場變化劇烈,φ0應取25°,同理,要使傳感器能最大范圍的檢測到磁場的變化,φ也應取25°。
在φ0取25°的情況下,通過Matlab計算得到半徑為42mm、φ在50°范圍內的球面上法向磁感應強度值,并作圖如圖6所示。
圖中XY平面上的圓形區域是φ<50°范圍內的球面在該平面上的投影,球面上點(0,0,-42)投影即為圖中點(0,0),每個小格分別對應球面上經度方向角度差為10°和緯度方向角度差為3°區域,在整個區域內相鄰部分的磁場沿軸向和徑向變化均比較明顯,也就是在φ<50°范圍內的球面上的磁感應強度沿經度方向和緯度方向變化較為劇烈,達到了改進模型的目的,同時也證明φ0和φ都取25°是合理的。
4 結束語
1)提出了一種基于永磁體陣列和霍爾傳感器陣列的智能球鉸鏈新結構。
2)建立和完善了新結構的理論測量模型,并通過Maxwell軟件仿真驗證其正確性。
3)為改進的理論模型確立新的數值積分算法,提高了計算效率,為角度實時檢測創造了條件。
4)優化了永磁體和傳感器的空間位置匹配,確定在一定永磁體剩磁條件下,永磁體和傳感器的最佳空間位置匹配。
[1]王海軍,王君英.關節間隙對并聯機床精度的影響規律研究[J].中國機械工程,2007,18(4):471-474.
[2]TALABA D.The angular capacity of spherical joints used in mechanisms with closed loops and multiple degrees of freedom[J].Roboticsand Computer-Integrated Manufacturing,2012,28(5):637-647.
[3]鮑鑫鑫,胡鵬浩,王靜,等.并聯機構中精密球鉸鏈的結構和誤差特點[J].機械工程與自動化,2013(1):217-218.
[4]劉巖,陳偉海,劉敬猛.可實現三維位置檢測的球型電機磁場分析[J].中國測試,2012,38(3):12-16.
[5]汪偉,焦健超,唐力偉,等.基于傳感器陣列的振動測試角速度算法研究[J].中國測試,2012,38(4):58-61.
[6]朱福榮,朱紅秀,姚欣歆,等.巖石破裂電磁輻射監測系統研制[J].中國測試,2013,39(6):64-67.
[7]胡鵬浩,李帥鵬,趙鵬,等.可實現回轉角度測量的球鉸鏈及測量方法:201310502930.2[P].2014-01-22.
[8]李帥鵬.智能球關節的測量原理及關鍵技術研究[D].合肥:合肥工業大學,2014.
[9]HU P H,WANG L,ZHU L,et al.A measuring method for ball joint spatial rotation angle[J].Sensors and Materials,2015,27(4):341-349.
[10]王春艷,李玉福.基于等效磁荷理論的磁力驅動器磁場計算[J].長春師范大學學報,2015,34(2):15-19.
[11]HUANG R,FENG J.Magnetic field analysis of permanent magnet array for planar motor based on equivalent magnetic charge method[C]∥Proceedings of the 10th World Congress On Intelligent Control and Automa-tion.IEEE,2012:3966-3970.
[12]劉宏娟.矩形永磁體三維磁場空間分布研究[D].北京:北京工業大學,2006.
[13]茍曉凡,楊勇,鄭曉靜.矩形永磁體磁場分布的解析表達式[J].應用數學和力學,2004,25(3):271-278.
[14]范結義,高成.商用電磁仿真軟件的現狀與發展[J].電子科技,2011,24(1):121-123.
(編輯:李妮)
Simulation and analysis of influence of magnetic field distribution in intelligent ball hinge
YANG Wenguo,HU Penghao,DANG Xueming
(School of Instrument Science and Opto-electronics Engineering,Hefei University of Technology,Hefei 230009,China)
Magnetic field distribution around ball head directly influences the measurement range and resolution of intelligent ball hinge.An improved intelligent ball hinge structure with several permanent magnets and magnetic effect sensors array around the spherical surface was proposed,which could be beneficial to the measuring resolution,the theory model was offered and followed by a new numerical integral algorithm.The validity of the theoretical analysis had been verified by Maxwell software simulation.After the corresponding theoretical analysis with theoretical model,the optimal spatial position matching of the permanent magnets and sensors was put forward,the result had important significance in improving the resolution.
Hall sensor;ball hinge;permanent magnet;measurement resolution
A
:1674-5124(2017)02-0130-04
10.11857/j.issn.1674-5124.2017.02.026
2016-05-10;
:2016-06-18
國家自然科學基金項目(51475133)安徽省自然科學基金項目(1508085MF122)
楊文國(1992-),男,河南洛陽市人,碩士研究生,專業方向為測試計量技術與儀器。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
當代陜西(2022年5期)2022-04-19 12:10:18
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
