無磁轉(zhuǎn)臺(tái)的電子羅盤誤差分離標(biāo)定方法*
2017-02-18 06:15:59林新華儲(chǔ)志偉武靖博
傳感器與微系統(tǒng) 2017年2期
高 可, 林新華, 儲(chǔ)志偉, 武靖博,3
(1.中國(guó)科學(xué)院 合肥智能機(jī)械研究所 傳感技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,安徽 合肥 230031;2.中國(guó)科學(xué)技術(shù)大學(xué) 自動(dòng)化系,安徽 合肥 230026; 3.合肥工業(yè)大學(xué) 化工機(jī)械研究所, 安徽 合肥 230009)
(1.中國(guó)科學(xué)院 合肥智能機(jī)械研究所 傳感技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,安徽 合肥 230031;2.中國(guó)科學(xué)技術(shù)大學(xué) 自動(dòng)化系,安徽 合肥 230026; 3.合肥工業(yè)大學(xué) 化工機(jī)械研究所, 安徽 合肥 230009)
無磁轉(zhuǎn)臺(tái)的電子羅盤誤差分離標(biāo)定方法*
高 可1,2, 林新華1, 儲(chǔ)志偉1,2, 武靖博1,3
(1.中國(guó)科學(xué)院 合肥智能機(jī)械研究所 傳感技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,安徽 合肥 230031;
2.中國(guó)科學(xué)技術(shù)大學(xué) 自動(dòng)化系,安徽 合肥 230026; 3.合肥工業(yè)大學(xué) 化工機(jī)械研究所, 安徽 合肥 230009)
(1.中國(guó)科學(xué)院 合肥智能機(jī)械研究所 傳感技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,安徽 合肥 230031;2.中國(guó)科學(xué)技術(shù)大學(xué) 自動(dòng)化系,安徽 合肥 230026; 3.合肥工業(yè)大學(xué) 化工機(jī)械研究所, 安徽 合肥 230009)
采用3個(gè)分立的磁感式磁傳感器和三軸加速度傳感器制作了全數(shù)字輸出電子羅盤;基于自制三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)提出了一種電子羅盤標(biāo)誤差分離標(biāo)定方法。通過無磁轉(zhuǎn)臺(tái)獲取磁傳感器敏感軸非正交或未對(duì)準(zhǔn)的參數(shù)和磁傳感器輸出特性曲線,磁傳感器的靈敏度系數(shù)因子和偏置量。分別評(píng)價(jià)偏置、靈敏度系數(shù)不一致以及非正交或未對(duì)準(zhǔn)對(duì)電子羅盤方位角精度的影響。實(shí)驗(yàn)結(jié)果表明:經(jīng)過校準(zhǔn)后,電子羅盤水平面內(nèi)誤差不超過0.22°,而俯仰角和翻滾角在60°內(nèi)時(shí),方位角最大誤差約為0.4°,說明了標(biāo)定方法的有效性。
電子羅盤; 標(biāo)定; 誤差分離; 無磁轉(zhuǎn)臺(tái)
0 引 言
電子羅盤通過檢測(cè)地磁場(chǎng)在水平面內(nèi)分量方向,以提供方位角信息,被廣泛應(yīng)用于導(dǎo)航領(lǐng)域。電子羅盤一般主要由磁傳感器和加速度傳感器構(gòu)成。加速度傳感器可測(cè)量電子羅盤的傾斜角和翻滾角,從而實(shí)現(xiàn)姿態(tài)補(bǔ)償功能[1,2]。此外,磁傳感器靈敏度系數(shù)、偏置量、磁敏感軸與羅盤外殼軸之間的角度偏差以及外界軟硬磁干擾都會(huì)扭曲電子羅盤的方位角輸出。因此,電子羅盤在使用之必須進(jìn)行磁傳感器標(biāo)定。目前,針對(duì)電子羅盤中的磁傳感器,已存在多種標(biāo)定方法[2~6]。其中,Bowditch P介紹了一種為大家所熟知的“swinging calibration”方法[3],該方法需要外在的方位角信息作為基準(zhǔn)。Honeywell公司的Caruso M J利用水平轉(zhuǎn)臺(tái)獲取磁傳感器輸出的最大值和最小值,粗略地估計(jì)了靈敏度不一致和零點(diǎn)漂移,但沒有考慮磁敏感軸非正交對(duì)對(duì)方位角精度影響[4]。捷克Vcˇ elǎk J報(bào)道了一種被稱為標(biāo)量標(biāo)定的方法,補(bǔ)償后電子羅盤方位角精度大約為0.6°,但計(jì)算量較大,同時(shí)不適合現(xiàn)場(chǎng)標(biāo)定。文獻(xiàn)[5]提出了基于橢球擬合算法的誤差補(bǔ)償方法,對(duì)電子羅盤的誤差來源考慮全面,但需要采集大量的磁傳感器的輸出數(shù)據(jù)。
本文設(shè)計(jì)了一種三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái),并相應(yīng)地提出了一種全新的簡(jiǎn)易的電子羅盤誤差分離方法,可直接確定磁傳感器零點(diǎn)漂移或硬磁干擾引起的偏置、靈敏度系數(shù)等,達(dá)到快速標(biāo)定校準(zhǔn)電子羅盤的目的。
1 三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)與電子羅盤硬件設(shè)計(jì)
三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)如圖1所示,具有三個(gè)互相垂直的旋轉(zhuǎn)軸,垂直度優(yōu)于0.05°;旋轉(zhuǎn)角度由測(cè)量精度為0.001°的光電編碼器確定。電子羅盤由三個(gè)分離的磁感應(yīng)(MI)磁傳感器和加速度計(jì)構(gòu)成,見圖2。
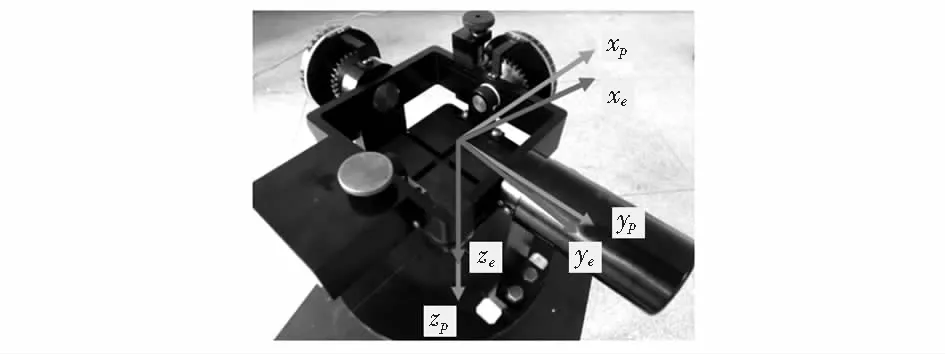
圖1 三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)
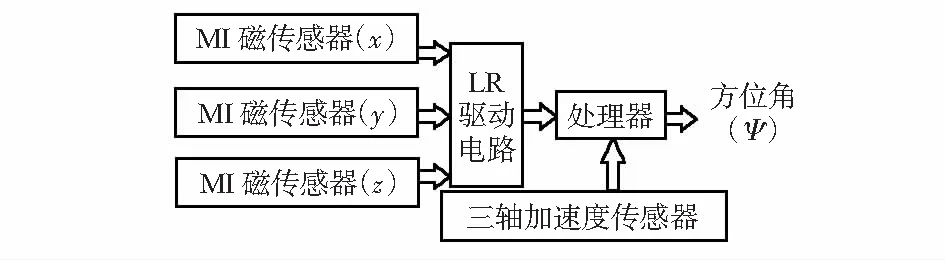
圖2 電子羅盤組成框圖
2 電子羅盤標(biāo)定方法
2.1 測(cè)量原理
首先,定義幾個(gè)在電子羅盤標(biāo)定過程中所需要的幾個(gè)坐標(biāo)系,如上圖1和圖3所示。地磁場(chǎng)坐標(biāo)系以e表示。其中,xe軸沿著地磁場(chǎng)矢量在水平面內(nèi)分量的方向,xz軸沿著重力方向,垂直向下,ye軸垂直于xe和ze組成的平面。p為轉(zhuǎn)臺(tái)坐標(biāo)系,xp,yp和zp三個(gè)坐標(biāo)軸分別沿著轉(zhuǎn)臺(tái)三個(gè)旋轉(zhuǎn)軸方向,并且zp和ze的方向保持一致。測(cè)量坐標(biāo)系m的三個(gè)坐標(biāo)軸xm,ym和zm分別沿著三個(gè)磁傳感器的敏感軸方向,并且坐標(biāo)軸之間彼此不垂直。電子羅盤體坐標(biāo)系b與電子羅盤長(zhǎng)方體外殼保持一致,xb,yb和zb分別沿著長(zhǎng)方體外殼相互垂直的三條邊。最后一個(gè)坐標(biāo)系l為局域水平坐標(biāo)系,xl和yl位于局域水平面內(nèi),xl與xz的方向一致。上述所有坐標(biāo)系都服從右手定則。θ和γ分別為體坐標(biāo)系相對(duì)于局域水平坐標(biāo)系的俯仰角和翻滾角。根據(jù)式(1)將體坐標(biāo)系上磁場(chǎng)強(qiáng)度分量投影到當(dāng)?shù)厮阶鴺?biāo)系上。
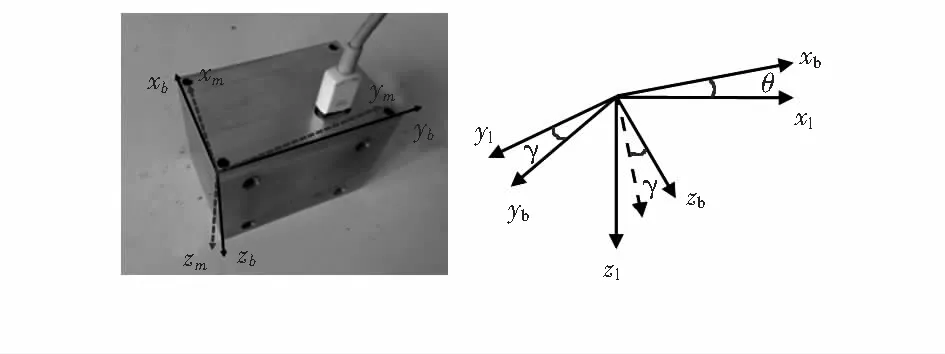
圖3 坐標(biāo)系示意圖
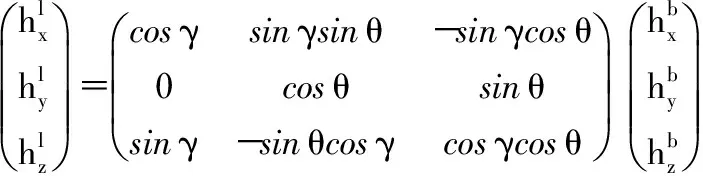
(1)
則方位角(ψ)可由式(2)和式(3)計(jì)算得到
(2)
(3)
2.2 磁傳感器誤差模型
磁傳感器輸出信號(hào)通常受設(shè)備誤差和磁場(chǎng)干擾的影響。設(shè)備誤差包含磁傳感器制作或安裝過程中引起的零點(diǎn)漂移、靈敏度系數(shù)不一致、測(cè)量噪音、磁敏感軸彼此之間不正交或磁敏感軸與外殼軸之間沒有對(duì)準(zhǔn)引起的誤差。磁場(chǎng)干擾可分為硬磁誤差和軟磁誤差兩類。因此,電子羅盤方位角的誤差模型為
(4)
(5)
2.3 磁傳感器標(biāo)定
基于上述三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái),提出了一種全新的、快速對(duì)磁傳感器進(jìn)行校準(zhǔn)的誤差分離標(biāo)定方法。首先,將三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)的xp-yp平面調(diào)節(jié)水平;然后將電子羅盤固定于轉(zhuǎn)臺(tái)xp-yp平面上,并使電子羅盤體坐標(biāo)系b中xb和zb軸方向與轉(zhuǎn)臺(tái)坐標(biāo)系p中xp和zp軸方向保持一致。通過分別旋轉(zhuǎn)轉(zhuǎn)臺(tái)坐標(biāo)系中xp,yp和zp軸,尋找磁傳感器輸出最大值的角度位置,確定測(cè)量坐標(biāo)系m中xm,ym和zm軸與電子羅盤體坐標(biāo)系b中xb,yb和zb軸彼此之間的夾角∠xmxb,∠xmyb,∠xmzb,∠ymxb,∠ymyb,∠ymzb,∠zmxb,∠zmyb和∠zmzb。同時(shí),還可以得到地磁場(chǎng)矢量與水平面xp-yp之間的夾角φ(磁傾角)以及地磁場(chǎng)矢量在水面內(nèi)分量與xp軸(轉(zhuǎn)臺(tái)零刻度線)之間的夾角δ。于是,測(cè)量坐標(biāo)系m與羅盤體坐標(biāo)系之間的轉(zhuǎn)換關(guān)系可由式(6)表示。
[xmymzm]T=[xbybzb]T
(6)
另外,當(dāng)轉(zhuǎn)臺(tái)xp-yp平面保持水平時(shí),繞zp軸旋轉(zhuǎn)到一定角度α?xí)r,xm方向的地磁場(chǎng)分量可通過式(7)計(jì)算得到
sin(α-δ)+cos∠xmzbsinφ]He
(7)

(8)

(9)
(10)
由式(5)、式(9)和式(10),可從測(cè)量坐標(biāo)系敏感軸上的磁傳感器輸出得到對(duì)應(yīng)體坐標(biāo)系上的地磁場(chǎng)分量
(11)
3 實(shí)驗(yàn)結(jié)果
利用自制的三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái),采用上述方法進(jìn)行標(biāo)定。整個(gè)標(biāo)定過程中室內(nèi)磁場(chǎng)保持不變。測(cè)量坐標(biāo)系m中xm,ym和zm軸與羅盤體坐標(biāo)系b中xb,yb和zb軸彼此之間的夾角由表1給出。磁敏感軸與羅盤外殼對(duì)應(yīng)軸的最大偏差角超過2°。圖4給出了擬合得到的磁傳感器數(shù)值輸出信號(hào)與之檢測(cè)的磁場(chǎng)分量之間的函數(shù)關(guān)系,其中He為地球磁場(chǎng)強(qiáng)度。

表1 磁敏感軸與羅盤體坐標(biāo)系中各軸之間的夾角 (°)
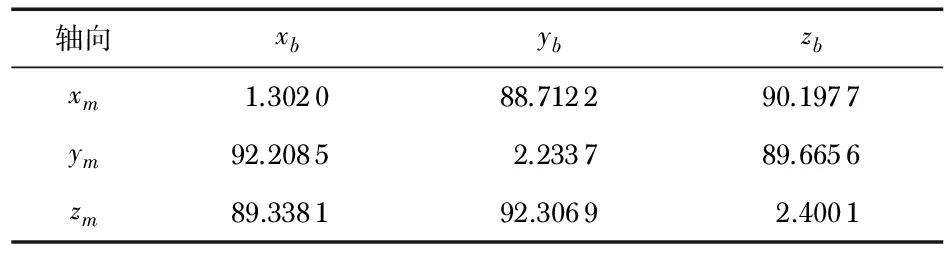
軸向xbybzbxm1.302088.712290.1977ym92.20852.233789.6656zm89.338192.30692.4001
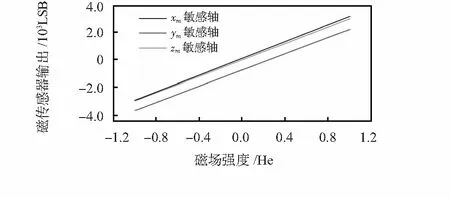
圖4 磁傳感器數(shù)值輸出特性曲線
表2 磁敏感軸的靈敏度系數(shù)和偏置量 LSB
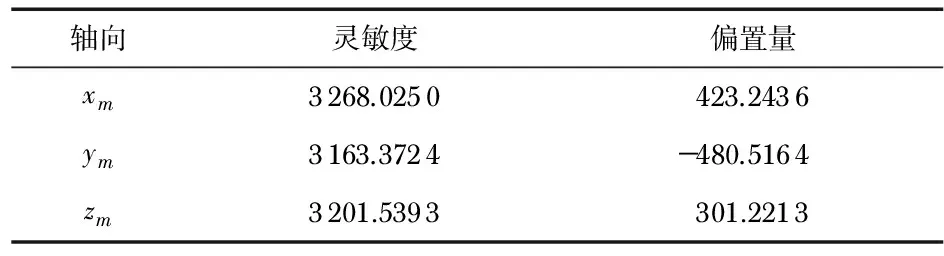
軸向靈敏度偏置量xm3268.0250423.2436ym3163.3724-480.5164zm3201.5393301.2213
至此,根據(jù)方程(11)、式(1)、式(2)和式(3)可計(jì)算羅盤的方位角。將羅盤固定于轉(zhuǎn)臺(tái),并使xl軸與xp方向一致,以轉(zhuǎn)臺(tái)方位角作為參考值來評(píng)估羅盤的方位角誤差。圖5給出了在轉(zhuǎn)臺(tái)xp-yp平面保持水平時(shí),繞zp軸旋轉(zhuǎn)任意角度時(shí),計(jì)算得到羅盤方位角誤差。標(biāo)定前的羅盤最大方位角誤差達(dá)20°左右。消除磁傳感器偏置引起的誤差后,電子羅盤方位角精度改善明顯,最大誤差降低了約85 %至3°。在此基礎(chǔ)上進(jìn)一步消除磁傳感器靈敏度系數(shù)不一致引起的誤差后,最大方位角誤差進(jìn)一步減小,約為2.4°。再進(jìn)行非正交校準(zhǔn),電子羅盤方位角精度將進(jìn)一步提高,最大誤差不超過0.22°。
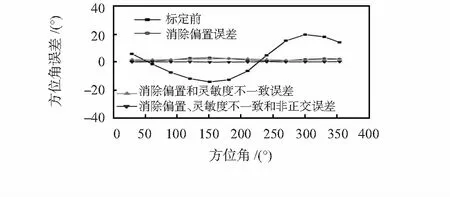
圖5 水平狀態(tài)下電子羅盤方位角誤差
另外,根據(jù)六位置標(biāo)定方法[7],對(duì)加速度傳感器進(jìn)行標(biāo)定,并研究了姿態(tài)對(duì)電子羅盤方位角誤差的影響如圖6所示。隨著俯仰角θ和翻滾角γ的增加,誤差有增大的趨勢(shì)。但在羅盤的俯仰角和翻滾角同時(shí)達(dá)到60°情況下,羅盤輸出計(jì)算的方位角最大誤差僅約為0.4°。上述實(shí)驗(yàn)結(jié)果表明,誤差分離標(biāo)定方法不僅在標(biāo)定高精度電子羅盤方面十分有效,而且可評(píng)估磁傳感器的性能;另外,還能分析各干擾因素對(duì)電子羅盤精度的影響大小。可以發(fā)現(xiàn),方位角誤差絕大部分來源于磁傳感器偏置引起的誤差。
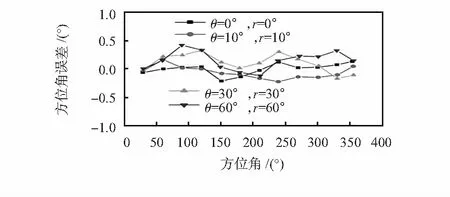
圖6 羅盤在不同姿態(tài)下的方位角誤差
4 結(jié) 論
基于自制的三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái),提出一種新的電子羅盤誤差分離標(biāo)定方法,并將之用于磁感應(yīng)式電子羅盤的標(biāo)定。該誤差分離方法不僅能獨(dú)立地補(bǔ)償來源于磁傳感器偏置、靈敏度系數(shù)不一致或敏感軸不互相垂直等引起的誤差,并且能對(duì)磁傳感器的性能進(jìn)行評(píng)價(jià)。對(duì)于集成的電子羅盤,方位角誤差主要來源于零點(diǎn)漂移和磁干擾引起的偏置。但為獲得高精度的電子羅盤,靈敏度系數(shù)不一致和非正交補(bǔ)償亦必不可少。在水平狀態(tài)下,校準(zhǔn)后的電子羅盤方位角最大誤差約為0.2°。在俯仰角和翻滾角都達(dá)60°時(shí),方位角誤差也僅為 0.4°左右。校準(zhǔn)后電子羅盤具有較高的精度說明基于三軸旋轉(zhuǎn)無磁轉(zhuǎn)臺(tái)的誤差分離方法的有效性。
[2] Vcˇelák J,Ripka P,Kubík J,et al.AMR navigation systems and methods of their calibration[J].Sensors and Actuators A:Physical,2005,123-124:122-128.
[3] Bowditch N.The American practical navigator[M].9th ed.Bethesda:National Imagery and Mapping Agency,1995.
[4] Caruso M J.Applications of magnetoresistive sensors in navigation systems[J].SAE Transactions,1997,106:1092-1098.
[5] Fang Jiancheng,Sun Hongwei,Cao Juanjuan,et al.A novel calibration method of magnetic compass based on ellipsoid fit-ting[J].IEEE Transactions on Instrumentation and Measurement,2011,60(6):2053-2061.
[6] 張愛軍,王昌明,趙 輝.三軸電子羅盤的磁方位角誤差補(bǔ)償研究[J].傳感器與微系統(tǒng),2008,27(8):33-35.
[7] Syed Z F,Aggarwal P,Goodall C,et al.A new multi-position calibration method for MEMS inertial navigation systems[J].Mea-surement Science and Technology,2007,18(7):1897-1907.
林新華,通訊作者,E—mail:xhlin@iim.ac.cn。
Calibration method of electronic compass with error-separation based on non-magnetic turntable*
GAO Ke1,2, LIN Xin-hua1, CHU Zhi-wei1,2, WU Jing-bo1,3
(1.State Key Laboratory of Transducer Technology,Institute of Intelligent Machines,Chinese Academy of Sciences,Hefei 230031,China; 2.Department of Automation,University of Science and Technology of China,Hefei 230026,China; 3.Research Institute of Chemical Machinery,Hefei University of Technology,Hefei 230009,China)
Full digital electronic compass is developed by using magnetic-inductive sensors and acceleration sensors and the error-separation method based on non-magnetic three-axis rotation platform is presented to calibrate the magnetic compass.The parameters about misalignment and non-orthogonality of the sensor axes and the response curve of sensor output to earth magnetic intensity are obtained.Furtherly,the sensitivity of magnetometers and the bias from the offset and hard-iron interference are estimated according to the response curve.The independent effect of non-orthogonality and misalignment,bias and inconsistence in sensitivity on the heading error can be evaluated with the error-separation method,respectively.After calibration, the maximum heading error of magnetic compass is about 0.4° when both pitch angle and roll angle are in the range of 60°,indicating the error-separation method is effective and efficient to calibrate electronic compasses.
electronic compass; calibration; error-separation; non-magnetic platform
2016—03—17
國(guó)家自然科學(xué)基金資助項(xiàng)目(61374016)
10.13873/J.1000—9787(2017)02—0021—04
TP 212
A
1000—9787(2017)02—0021—04
高 可(1990-),男,碩士研究生,研究方向?yàn)闄z測(cè)技術(shù)與自動(dòng)化裝置。
