傾斜位置成像的輪對幾何參數計算方法*
2017-02-18 06:16:06賈傳寶吳開華陳強元
傳感器與微系統 2017年2期
賈傳寶, 吳開華, 陳強元
(杭州電子科技大學 生命信息與儀器工程學院,浙江 杭州 310018)
傾斜位置成像的輪對幾何參數計算方法*
賈傳寶, 吳開華, 陳強元
(杭州電子科技大學 生命信息與儀器工程學院,浙江 杭州 310018)
基于光截圖像的輪對幾何參數在線檢測中,由于檢測環境的特殊性,面陣CCD攝像機的安裝位置受到很大限制。提出一種依據攝像機沿傾斜角度采集輪對光截曲線圖像進而計算輪對幾何參數的檢測新方法。利用攝像機在空間三個方向上的傾斜角度,計算出輪對幾何參數關鍵點在圖像中的位置,進而計算出輪對幾何參數,最終完成了輪對輪緣高度和輪緣厚度的計算。設計了驗證實驗,實驗結果表明:該方法檢測精度可達±0.2 mm。
輪對檢測; 幾何參數; 光截圖像; 傾斜位置
0 引 言
我國軌道交通發展迅速,為保證車輛運行的安全,對車輛輪對幾何尺寸進行在線檢測具有十分重要的意義[1,2]。相比于人工檢測的局限性,基于機器視覺的光截圖像檢測方法具有速度快、精度高、非接觸、抗干擾能力強等優點[3~5],在輪對檢測方面得到了廣泛的應用。
輪對光截圖像采集過程中,CCD攝像機安裝在低于軌道水平面的側面位置,這樣沿傾斜角度拍攝得到的輪對輪廓曲線在圖像中會產生畸變,影響輪對檢測精度。文獻[6]提出利用幾何光學成像原理,設計攝像機的理論位置,通過精確調節攝像機的傾斜角度,使實際拍攝位置與理論位置重合,從而簡化參數計算過程。此方法精度較高,但攝像機調節難度較大。文獻[7,8]提出了用于檢測輪對幾何參數的標定方法,利用標定得到圖像校正系數對輪對光截曲線圖像進行校正,還原為不失真的圖像,然后計算輪對參數,該方法對輪對幾何參數檢測精度可達0.2 mm。
本文結合實際檢測過程中攝像機的安裝位置,提出一種基于攝像機沿傾斜角度拍攝輪對光截曲線圖像來計算輪對幾何參數的新的檢測方法。利用攝像機在空間中安裝角度,求解出輪對關鍵點在圖像中的成像位置,依據關鍵點像點之間的距離計算出輪對實際幾何參數。
1 輪對參數及檢測原理
1.1 輪對幾何參數
輪對主要幾何參數定義示意圖如圖1所示。車輪在軌道上的滾動接觸面稱為踏面,踏面內側凸起的部分稱為輪緣,距離輪緣內側面70 mm處踏面上一點稱為基點,基點與車軸之間距離為輪對半徑,基點與輪緣頂點之間的高度稱為輪緣高度,從基點開始沿輪對軸心向外12 mm處輪緣的厚度稱為輪緣厚度。
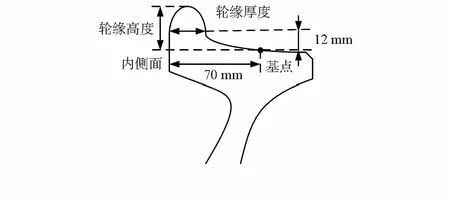
圖1 輪對幾何參數定義
1.2 輪對檢測原理
基于光截圖像的輪對在線檢測原理如圖2所示,線激光源沿一定角度照射車輪,在車輪表面產生一條光截曲線,則該曲線包含了輪對截面的外形輪廓信息。由于安裝限位的影響,面陣CCD攝像機在軌道側面進行成像。通過對采集的輪對光截曲線圖像進行處理,結合攝像機安裝位置信息進行參數計算,即可實現對輪對幾何參數的檢測。
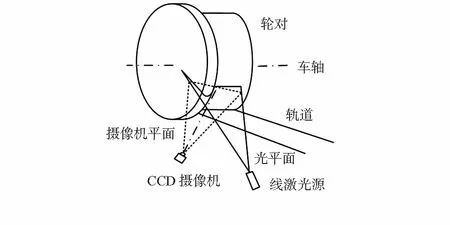
圖2 基于光截圖像的輪對檢測原理
1.3 攝像機空間位置
如圖3所示。以攝像機鏡頭為原點O,沿軌道方向為X軸,垂直軌道為Y軸,豎直方向為Z軸,建立坐標系O-XYZ。設仰角、偏角、旋轉角分別為α,β,γ,圖3(a)中,OA表示攝像機光軸,α表示OA與XOY平面的夾角,β表示OA與XOZ平面的夾角。圖3(b)中,OA表示攝像機光軸,直線AB為過輪對基點平行于車軸的一條直線,平面OAC為攝像機平面,平面OBD為過點O和直線AB的平面,兩平面相交于光軸OA,旋轉角γ即表示這兩平面之間的夾角。
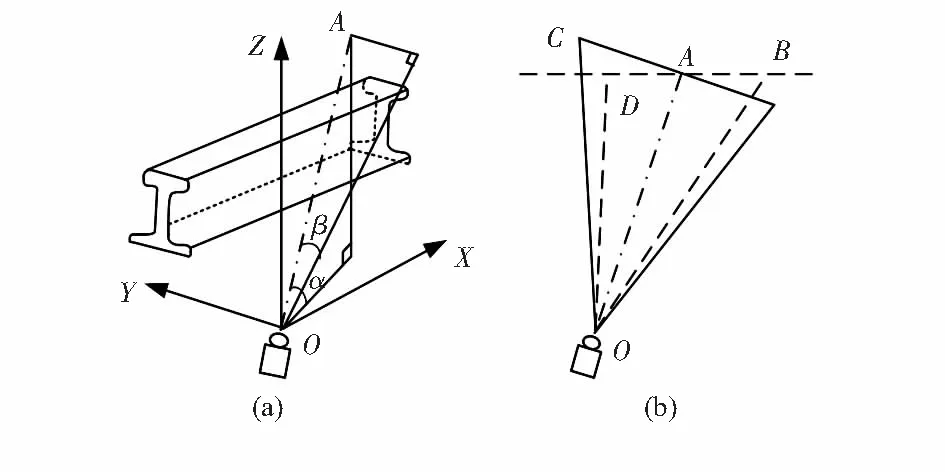
圖3 攝像機空間安裝位置
2 參數計算方法
參數計算需要首先確定輪對幾何參數關鍵點在圖像中的位置才能進一步求解幾何參數。輪對由于磨損導致直徑減小,在成像位置處與設計輪對存在豎直方向上的高度差,線激光源以光平面沿45°方向照射在磨耗輪對上產生的光截曲線位置會發生改變,示意圖如圖4所示。
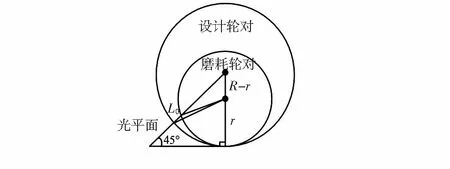
圖4 磨耗輪對光截曲線產生位置示意圖
已知設計輪對半徑為R,設磨耗輪對半徑為r,設計輪對與磨耗輪對光截曲線之間的垂直距離為L0,依據圖中幾何關系可得
(R-L0)2+(R-r)2-r2-2·(R-L0)·
(R-r)·cos 45°=0
(1)
建立輪對基點成像位置求解模型如圖5所示,以圖像中心點為原點建立o-xy圖像坐標系,A點表示攝像機鏡頭中心點,直線FA表示光軸,B點為光軸與光平面的交點,D點表示基點,E點表示過基點平行于車軸的直線與輪緣內側面的交點,則由輪對幾何參數定義知DE=70 mm。設光軸和圖像坐標系y軸所在的平面為π平面,過D作DH垂直π平面于點H,則DH在圖像中的像長D'H'垂直于y軸,D′H′的長度即為D′點在圖像中的橫坐標值。BG為π平面與光平面的交線,作BC垂直于DE于點C,C點表示磨耗輪對光截曲線視場中心點,DC=35 mm,則CG即為斜視角下磨耗輪對光截曲線視場偏移量。則在ΔDHG中,DH長度為
DH=DG·cos∠HDG+(DC+CG)·cos∠HDG
(2)
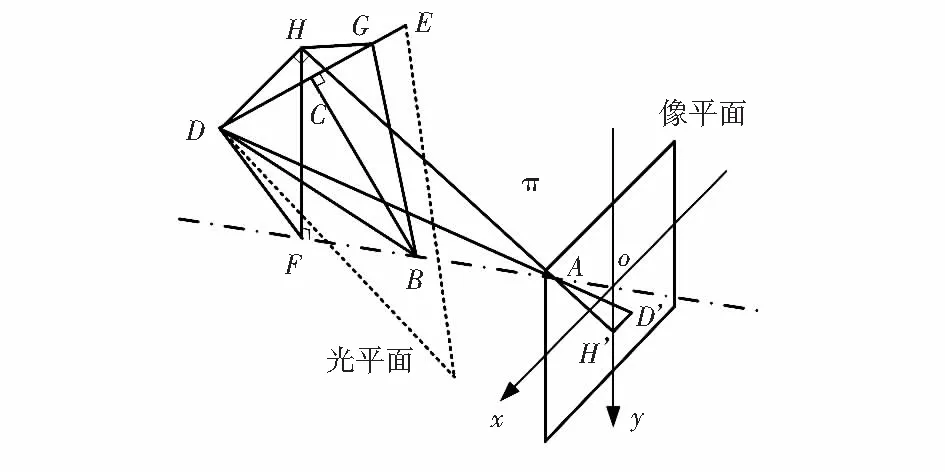
圖5 基點成像位置求解模型
過D作DF垂直于光軸于點F,連接HF,則HF垂直于光軸,AF即為D點物距。已知B點物距為u,則可通過確定BF來計算物距AF的長度
AF=u+BF
(3)
由于物距遠大于像距,故可以使用焦距f代替物距,依據光學成像公式即可計算出D′在圖像中的橫坐標大小
D′H′=DH·f/AF
(4)
利用ɑ,β,γ分別計算出CG,∠HDG和AF代入式(1)~式(3)即可計算出D′H′。因此,只需在光截曲線上代表踏面部分找到橫坐標長度為D′H′的點,即為該輪對基點所在位置。同理,其它參數關鍵點均可通過此方法確定其在圖像中的坐標。
依據圖像中幾何參數關鍵點之間距離即可求解出空間中輪對幾何參數對應的物長,求解示意圖如圖6所示。
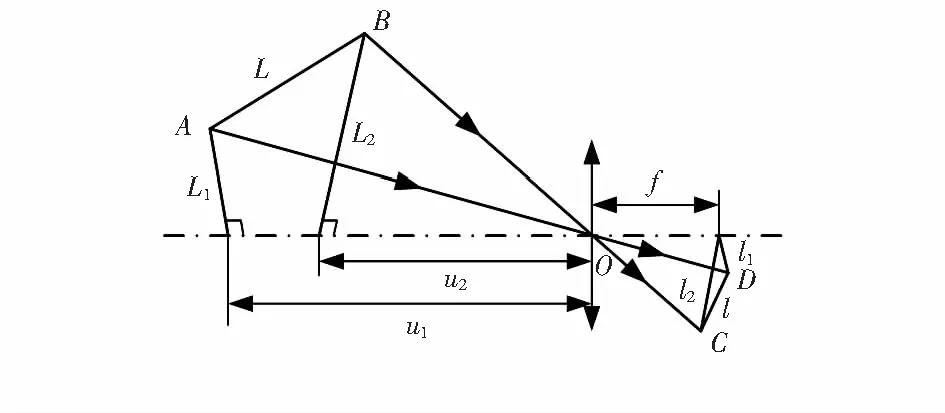
圖6 物長求解示意圖
設AB為空間物長,長度為L,A、B兩點對應的物距分別為u1和u2,L1和L2為A,B兩點距離光軸的距離,DC為其像長,長度為l,l1和l2分別為D,C兩點距離圖像中心點之間的距離,利用焦距f代替像距。在ΔCOD和ΔAOB中,利用余弦定理,可得出物長L與像長l之間的對應關系
(5)
式中L1=u1·l1/f,L2=u2·l2/f。
依據式(1)~式(5)即可計算出輪緣高度和輪緣厚度的幾何尺寸。
3 實驗驗證
為了驗證該方法的檢測精度,選擇對標定板和輪對曲線實驗板成像進行實驗驗證,實驗分為兩部分,標定實驗和參數計算實驗。設計標定板和輪對曲線實驗板分別如圖7和圖8所示,其中標定板特征點(圖中十字線的交點)之間的距離精度為0.01 mm。輪對曲線實驗板上的特征曲線是參照輪對截面曲線設計的,其周圍的十字叉點用來對特征曲線進行定位,圖中g點與h點之間和m點與n點之間的距離精度均為0.01 mm。

圖7 標定板
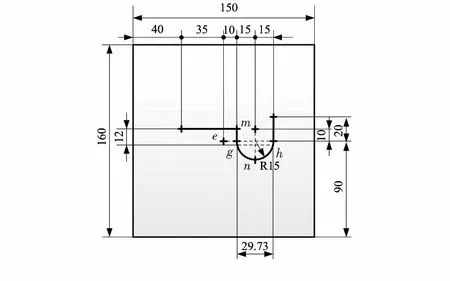
圖8 輪對曲線實驗板
3.1 標定實驗
3.1.1 攝像機標定原理
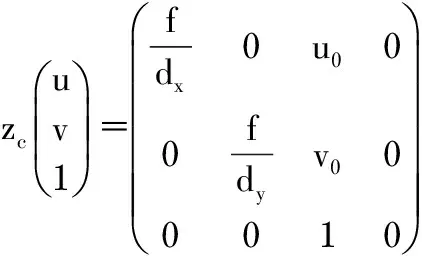
實驗中通過標定獲取攝像機在空間中的傾斜角度。標定原理是通過確定物與像所在坐標系之間的映射關系,確定物平面與像平面法向量之間的夾角,從而計算出攝像機的傾斜角度。標定過程通過計算世界坐標系、攝像機坐標系以及圖像坐標系之間的轉換關系,實現對標定矩陣的求解。設空間一點P在上述三個坐標系中的坐標依次分別為pw(xw,yw,zw),pc(xc,yc,zc)和pu(u,v),則P點世界坐標到圖像坐標之間的轉換關系為
(6)
式中R為旋轉矩陣,T為平移矩陣,(u0,v0)為CCD中心像元坐標,dx和dy分別為像元尺寸的長和寬,f為攝像機焦距。
確定轉換矩陣之后即可確定P點在攝像機坐標系中的坐標,通過空間任意三個點的坐標即可確定此三點所決定的平面,利用該平面的法向量與像平面法向量之間的夾角即可求解出攝像機的傾斜角度。
3.1.2 攝像機標定實驗
1)選用面陣CCD攝像機型號為JAI CM—140GE,分辨率為1392×1040,像元大小為0.004 65×0.004 65 mm,攝像機鏡頭焦距為25 mm。安裝攝像機在軌道側面,依據圖3中攝像機傾斜角度定義,調節攝像機的仰角ɑ為(60°±5°),偏角β為(23°±5°),旋轉角γ≤20°。用底座固定標定板并豎直安裝在軌道上,且為了便于驗證標定精度,使光軸和標定板的交點與標定板上o點重合。觸發攝像機對標定板拍攝一幅圖像后移去標定板,采集示意圖如圖9所示,采集到的標定板圖像如圖10所示,圖10(a)為原始圖像,圖10(b)為經圖像分割、細化等處理后的圖像。從處理后的標定板圖像中提取出特征點坐標,利用上述標定原理,計算出攝像機傾斜角度ɑ,β,γ,以及光軸與標定板交點o的物距u。
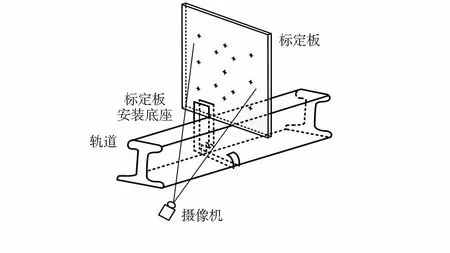
圖9 采集示意圖
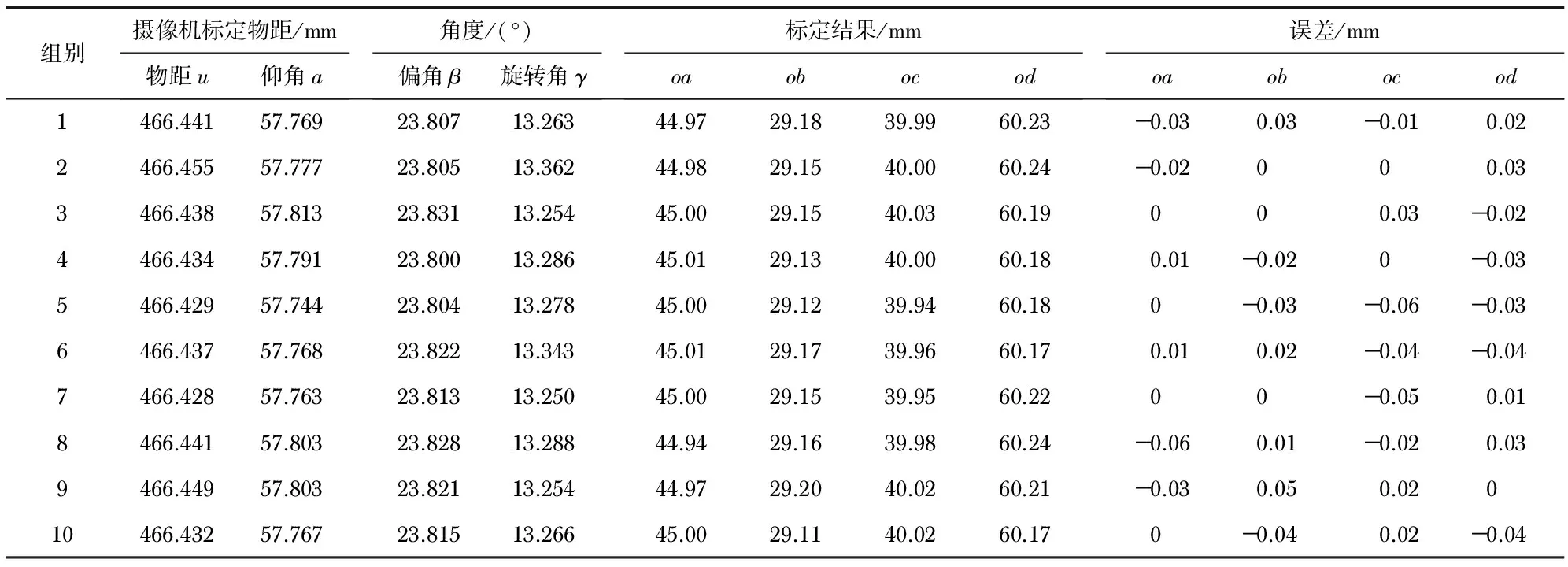
2)選取標定板上a,b,c,d,o五個特征點,利用標定出的角度和物距反推出oa,ob,oc,od之間的距離,并與其實際值相比較,計算誤差。以10次實驗為一組,重復進行10組實驗,表1為隨機抽取的一組實驗數據。已知標定板上特征點之間的距離為:oa=45.00 mm,ob=29.15 mm,oc=40.00 mm,od=60.21 mm。
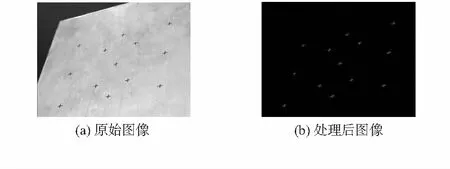
圖10 標定板圖像
由表1可知,攝像機標定精度在±0.1 mm以內。
表1 標定實驗結果
組別攝像機標定物距/mm物距u仰角ɑ 角度/(°)偏角β旋轉角γ 標定結果/mmoaobocod 誤差/mmoaobocod1466.44157.76923.80713.26344.9729.1839.9960.23-0.030.03-0.010.022466.45557.77723.80513.36244.9829.1540.0060.24-0.02000.033466.43857.81323.83113.25445.0029.1540.0360.19000.03-0.024466.43457.79123.80013.28645.0129.1340.0060.180.01-0.020-0.035466.42957.74423.80413.27845.0029.1239.9460.180-0.03-0.06-0.036466.43757.76823.82213.34345.0129.1739.9660.170.010.02-0.04-0.047466.42857.76323.81313.25045.0029.1539.9560.2200-0.050.018466.44157.80323.82813.28844.9429.1639.9860.24-0.060.01-0.020.039466.44957.80323.82113.25444.9729.2040.0260.21-0.030.050.02010466.43257.76723.81513.26645.0029.1140.0260.170-0.040.02-0.04
3.2 參數計算實驗
1)由于實驗條件限制,輪對幾何參數計算實驗通過對輪對曲線實驗板上參數關鍵點之間的距離求解來驗證參數計算結果的精度。標定實驗完成以后,移去標定板,將輪對曲線實驗板豎直安裝在底座上,觸發攝像機拍攝一幅圖像,然后取下該實驗板。輪對曲線實驗板圖像如圖11所示,圖11(a)為原始圖像,圖11(b)為依據文獻[9,10]提出的分割算法和細化算法進行處理后得到的單像素圖像。
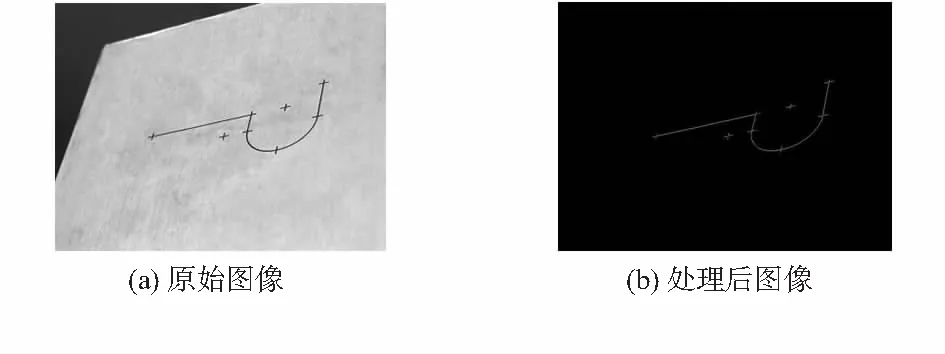
圖11 輪對曲線實驗板圖像
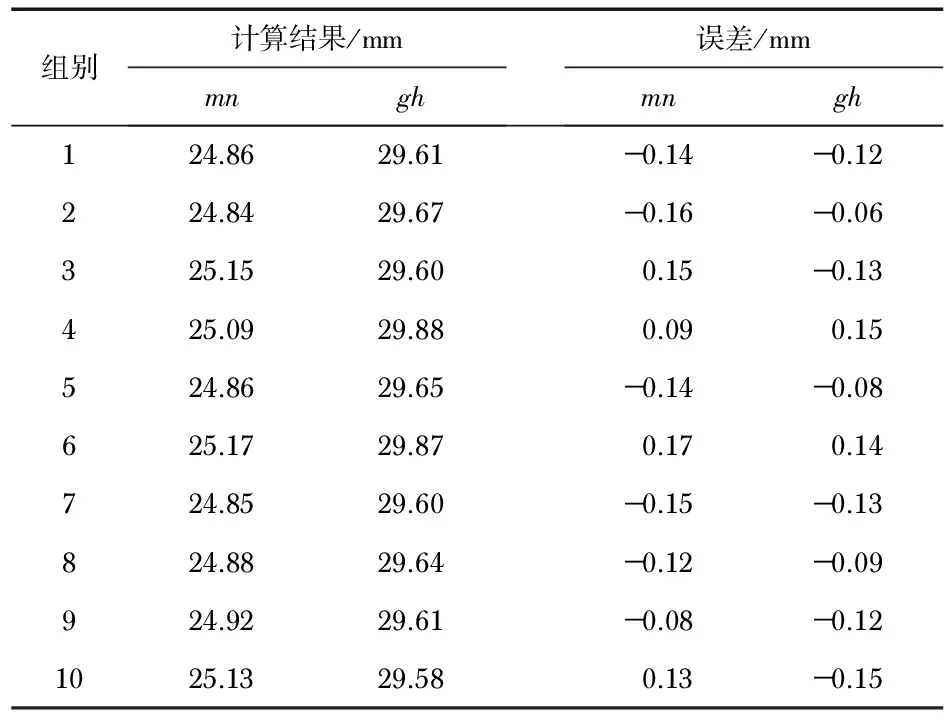
2)輪對參數計算過程中,光平面沿45°角度傾斜照射在輪對表面,由于標定板豎直安裝,不與光平面重合,可以先進行一步轉化,計算出假設輪對曲線實驗板和攝像機整體旋轉到該實驗板與45°光平面重合位置處,攝像機在空間中傾斜角度,然后再代入公式計算。結合圖1中輪對參數的定義,圖8中mn表示輪緣高度,gh表示輪緣厚度,點e表示設計的光軸與輪對曲線實驗板交點位置,則e與m之間的垂直距離即為圖4中的L0,代入式(1)即可計算出r值,由于光軸與該實驗板實際交點不一定會與設計位置重合,不重合時必須根據兩者實際交點位置修正該值。利用式(2)~式(4)計算出標定板上m點在圖像中的坐標,而n點位置則利用搜索算法找到曲線弧的最低點,以此確定其在圖像中坐標,將mn在圖像中的長度帶入式(5),即可計算出mn對應的實際長度。同理,gh對應的實際長度也可由式(1)~式(5)求出。以10次實驗為一組,重復進行10組實驗,表2為隨機抽取的一組實驗數據。
由實際尺寸知:mn=25.00 mm,gh=29.73 mm。
表2 參數計算結果
組別計算結果/mmmngh 誤差/mmmngh124.8629.61-0.14-0.12224.8429.67-0.16-0.06325.1529.600.15-0.13425.0929.880.090.15524.8629.65-0.14-0.08625.1729.870.170.14724.8529.60-0.15-0.13824.8829.64-0.12-0.09924.9229.61-0.08-0.121025.1329.580.13-0.15
由表2參數計算結果可知,精度在±0.2 mm以內。
4 結束語
本文主要研究了光截圖像法在輪對幾何參數求解中的應用,提出了一種利用斜視角下拍攝的輪對光截曲線圖像求解輪對幾何參數的計算方法,該方法不需校正圖像,且對圖像采集攝像機的安裝姿態沒有嚴格限制,方便安裝和調節。最后通過設計標定板和輪對曲線實驗板分別對攝像機標定及輪對幾何參數計算進行了實驗驗證,實驗結果表明:該方法誤差在±0.2 mm以內。
[1] Zhang Z F,Gao Z,Liu Y Y,et al.Computer vision-based method and system for online measurement of geometric parameters of train wheel sets[J].Sensors,2011,12(1): 334-346.
[2] He H T,Shao S Y,Feng Q B.Online measurement for geometrical parameters based on 2D laser sensor[C]∥The Ninth Internatio-nal Symposium on Precision Engineering Measurement and Instrumentation,Changsha:International Society for Optics and Photonics,2015.
[3] 張志峰,高 巖,任宇芬,等.非接觸測量在輪對參數檢測技術的應用[J].激光與紅外,2010,40(10):1125-1130.
[4] 徐晉卿,陳唐龍,占 棟,等.基于機器視覺的鋼軌輪廓測量方法研究[J].傳感器與微系統,2014,33(4):27-30.
[5] 楊 賀.基于機器視覺的輪對磨耗檢測技術研究[D].北京:北京交通大學,2015.
[6] 班 韜.基于結構光成像的機車輪對磨耗參數在線檢測技術研究[D].杭州:杭州電子科技大學,2010.
[7] 張 渝,彭建平,楊 凱,等.輪對外形輪廓檢測中攝像機系統的標定算法[J].光電工程,2009,36(7):112-116.
[8] 趙 勇,方宗德,王侃偉,等.輪對輪緣磨耗非接觸測量的現場標定方法[J].機床與液壓,2008,35(12):135-137.
[9] 史 倩,吳開華.區域生長的輪對圖像分割[J].中國圖象圖形學報,2012,17(9):1122-1127.
[10] 李文杰,何家峰.一種改進的A-W細化算法[J].計算機工程,2012,38(6):219-220.
吳開華,通訊作者,E—mail:wukaihua@hdu.edu.cn.
應用技術
Calculation method of wheel set geometrical parameters by imaging at inclined position*)
JIA Chuan-bao, WU Kai-hua, CHEN Qiang-yuan)
(College of Life Information Science & Instrument Engineering,Hangzhou Dianzi University,Hangzhou 310018,China)
On-line detection of wheel set geometric parameters based on optical cross section image,mounting position of planar array CCD camera are greatly restricted because of particularity of detecting environment,and there exist a large distortion of the collected image.A new method is proposed to calculate wheel set geometric parameters based on camera along tilt angle collecting optical curve image.According to tilt angles of camera in three direction in space,calculate position of the key points in the image,and calculating the object length.Finally calculation of wheel set flange height and flange thickness are completed.Verification experiment is designed according to site installation position,and the experimental result shows that,the detection precision of this method can reach ±0.2 mm.
wheel set detection; geometrical parameters; light section image; inclined position
10.13873/J.1000—9787(2017)02—0150—04
2016—03—09
國家自然科學基金資助項目(61372155)
TN 29
A
1000—9787(2017)02—0150—04
賈傳寶(1990-),男,碩士研究生,研究方向為光電檢測技術與儀器領域。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
