改進UKF算法在PMLSM無位置傳感控制中的應用*
2017-02-18 06:16:06王桂榮李建勇
傳感器與微系統 2017年2期
關鍵詞:系統
王桂榮, 李建勇
(中國計量學院 機電工程學院,浙江 杭州 310018)
改進UKF算法在PMLSM無位置傳感控制中的應用*
王桂榮, 李建勇
(中國計量學院 機電工程學院,浙江 杭州 310018)
針對永磁直線同步電機(PMLSM)的無位置傳感控制,提出了一種基于改進無跡卡爾曼濾波(UKF)算法的永磁直線同步電機的動子速度和位置估計方法,對永磁直線同步電機的動子速度和位置進行估計。相比于傳統的UKF算法,改進UKF算法在采樣點的獲取上進行了改進,在采樣點的獲取上運用了球形采樣策略,而非傳統的平方根對稱采樣策略,極大減少了采樣點的數量,減少了狀態估計過程中算法的計算量,在估計性能相當的情況下,改進的球形采樣策略UKF算法較傳統的平方根對稱采樣UKF算法在永磁同步直線電機無位置傳感實時控制系統中有明顯優勢,取得良好的控制效果。
永磁直線同步電機; 改進無跡卡爾曼濾波; 無位置傳感控制
0 引 言
直線同步電機作為直線傳動裝置,相比于傳統的“旋轉電機與滾珠絲杠”的直線傳動組合有精度高、推力大、響應快等優點,已經被越來越多的應用于直線驅動以及高精度加工場合[1]。然而機械物理傳感器實現的位置、速度反饋構成的閉環系統,增加了系統的成本,同時機械物理傳感器易受環境的影響,對系統的可靠性帶來了不穩定因素,因此,無位置傳感技術取代傳統的物理傳感器研究變得有意義。
目前基于電機數學模型的濾波狀態估計算法在永磁同步電機的無位置傳感控制中被廣泛研究。文獻[2]中將擴展卡爾曼濾波(extended Kalman filtering,EKF)應用于永磁同步電機的無位置傳感控制中,取得了良好的效果,然而EKF需要計算雅可比矩陣,不利于工程上的實現,同時EKF算法對系統線性化后進行一階截斷,這樣容易產生較大誤差,使系統不穩定。針對EKF算法的以上問題,Juelier S J等人[3]提出了一種無跡卡爾曼濾波算法(unscented Kalman filtering,UKF),用于非線性濾波。UKF采用確定性的采樣策略,通過非線性模型實現狀態均值和方差的遞推更新,降低了非線性誤差。UKF在高精度的永磁直線同步電機(permanent magnetic linear synchronous motor,PMLSM)無位置傳感控制系統的狀態估計研究較少,同時為了滿足PMLSM的實時控制與誤差補償,算法的計算量有待進一步降低,因此,文中提出了一種基于球形采樣策略的UKF算法用于PMLSM無位置傳感控制系統的動子速度和位置估計,來進一步降低傳統平方根對稱采樣策略UKF算法估計過程的算法計算量,并進行了仿真實驗研究。
1 改進UKF算法
改進的UKF算法采用球形采樣策略,從狀態點的分布中取采樣點。假設非線性系統模型為
xk=f(xk-1,k-1)+v(k-1)
(1)
zk=H(xk,k)+ω(k)
(2)
式中v(k)為系統的過程噪聲,ω(k)為輸出觀測噪聲,f(·)為系統的狀態轉移矩陣,H(·)為系統的輸出矩陣。假設v(k),ω(k)的均值為零。文獻[4]指出,如果對于n維的狀態向量,至少需要n+1個采樣點才能確定狀態向量的后驗分布。改進的UKF算法采用球形采樣策略,算法采樣策略過程如下:
1)選擇初始權系數W0∈[0,1]。W0是一個自由變量,它影響的采樣點的四階或者更高階數。
2)選擇其余權系數
W(i)=1-W/(n+1)
(3)
3)初始化一元向量
(4)
4)對于j從2~n的取值,獲得向量σ的過程如下
上面遞推結束后將得到n維向量σ,同時得到了n+2個采樣點。當W(0)=0時,實際參與UT變換的點只有n+1個點,對于權值,除了W(0)外,其余的權值都是相等的。改進的濾波算法在采樣策略上加以改善提高,可以進一步降低采樣點的數量,減少計算量,從而滿足系統的實時性要求,很大地提高了工程上的實現可能。
2 PMLSM數學模型
在靜止α-β坐標系下,對于隱極式永磁直線同步電機的電機電壓方程為
(8)
(9)
式中uα,uβ,iα,iβ分別為靜止α-β坐標系下定子電壓、定子電流;L,R,ψf,τ分別為定子電感、定子電阻、定子永磁體磁鏈、極距。文中選取了磁鏈信息作為狀態向量,對式(8)、式(9)整理得
(10)
(11)
考慮到電機的機械速度時間常數遠大于電磁過程的時間常數,速度的變化率遠小于濾波器的采樣頻率,因此假設速度的導數為零[5]。建立了以[ψαψβvx]為狀態向量,α-β坐標系下電流iα,iβ作為觀測量的PMLSM的狀態空間方程,如式(12)所示
(12)
在電機控制過程中霍爾傳感器可以實現對電機大電流的測量,在電機控制、保護、監測、動力管理等方面有著重要的作用[6]。從式(12)可以看出,PMLSM是一個四階的非線性系統。為了實現算法模型的數字化,對狀態空間方程進行離散化。假設采樣周期為足夠小的時間量T,且假設在采樣時間間隔內,控制信號的大小是不變的,采用一階歐拉積分實現對電機模型方程的離散化[7]。
3 PMLSM狀態估計仿真研究
PMLSM控制系統采用id=0的最大推力控制策略,通過對q軸、d軸的電流控制,互不影響的改變相應的磁鏈。系統的速度控制器和電流控制器分別采用PI控制器,如圖1所示的選取一種表面貼裝式PMLSM進行仿真研究,電機的參數如表1所示。
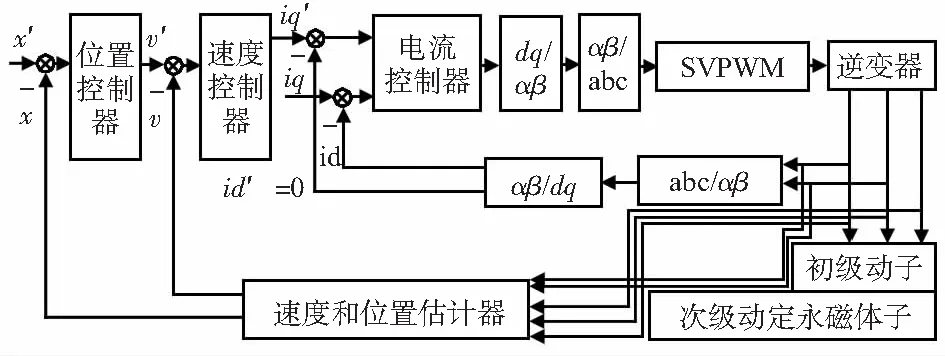
圖1 PMLSM控制系統
算法初始估計時必須先給定狀態的初始值x0和誤差協方差陣的初始值P0。系統狀態的初始值選取永磁直線
表1 電機參數

電機參數數值電機參數數值電阻R/Ω2.75極距τ/m0.0016電感L/mH2.67動子質量M/kg25永磁磁通ψf/Wb0.303磁場常數B/(N·s/m)4反電勢常數Ke/(V·s/m)59.5
同步電機實際的初始值作為狀態向量的初始值x0=[0.303 0 0 0]。初始狀態誤差對估計的影響主要依靠初始狀態誤差的協方差P0進行修正,誤差協方差矩陣為非負定方陣,現假定P0為對角矩陣。本文選取P0的初值P0=diag{ ([0.1 0.1 0.008 0.001])}。
算法設計中,噪聲方差陣Q和R對估計的性能影響很大,選擇不當會導致濾波器發散。而過程噪聲和測量噪聲的統計特性是很難確定的,在應用時Q和R陣是通過反復試驗來確定[8]。文中選取Q和R陣為:Q=diag([5.24×10-55.24×10-51.355×10-23×10-5]),R=diag([4×10-44×10-4]),在1 m/s速度下進行仿真實驗,圖2和圖3展示的是電機的實際速度(v)、估計速度vesti和速度誤差verro以及實際位置x,估計位置xesti以及位置誤差xerro的仿真結果。
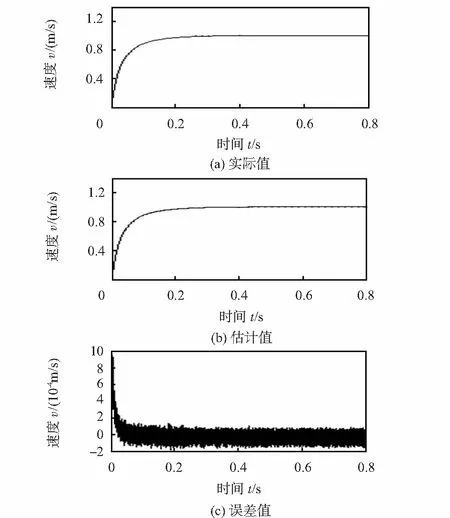
圖2 v=1 m/s時算法對速度估計情況
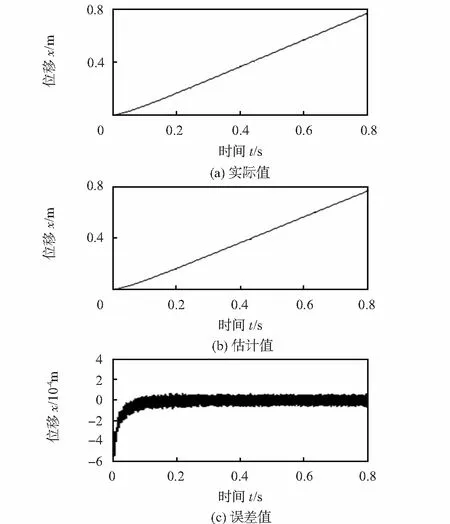
圖3 v=1 m/s時算法對位置估計情況
上述曲線表明:在1 m/s的速度下,算法的位置和速度估計在有限的時間內誤差是收斂的,且有較高估計精度,驗證了本文所提出的基于改進的UKF算法的PMLSM的速度和位置觀測器能夠在誤差允許的范圍內準確估計電機動子的速度和位置,所構成的系統具有很好的動靜態性能。
4 結 論
提出了一種基于改進的UKF算法的PMLSM的無位置傳感速度和位置的估計方法,并進行了仿真實驗研究,實驗證明:改進的UKF算法在PMLSM無位置傳感控制中,能有效地對速度和位置進行估計,有較高的估計精度,對于電機控制的實時性要求有很好的滿足。
[1] 葉云岳.直線電機原理與應用[M].北京:機械工業出版社,2000:1-4.
[2] Idkhajine L,Monmasson E,Maalouf A.Fully FPGA-based-sensorless control for synchronous AC drive using an extended Kalman filter[J].IEEE Transactions on Industrial Electronics,2012,59(10):3908-3918.
[3] Julier S J,Uhlmann J K.A new approach for filtering nonlinear system[C]∥Proc of the American Control Conference,Seattle:American Automatic Control Council,1995:1628-1632.
[4] Julier S J,Uhlmann J K.Reduced sigma points filters for the pro-pagation of means and covariances through nonlinear transformations[C]∥Proc of American Control Conference,Jefferson:American Automatic Control Council,2002:887-892.
[5] 張 猛,肖 曦,李永東.基于擴展卡爾曼濾波器的永磁同步電機轉速和磁鏈觀測器[J].中國電機工程學報,2007,27(36):36-40.
[6] 郭 軍,劉和平,劉 平.基于大電流檢測的霍爾傳感器應用[J].傳感器與微系統,2011,30(5):142-145.
[7] 陸華才.無位置傳感器永磁直線同步電機進給系統初始位置估計及控制研究[D].杭州:浙江大學,2008:61-63.
[8] 賈洪平,賀益康.一種適合DTC應用的非線性正交反饋補償磁鏈觀測器[J].中國電機工程學報,2006,26(1):101-105.
李建勇,通訊作者,E—mail:ljy365292393@163.com。
Application of modified UKF algorithm in PMLSM sensorless control*
WANG Gui-rong, LI Jian-yong
(College of Mechanical & Electrical Engineering,China Jiliang University,Hangzhou 310018,China)
In view of sensorless control of permanent magnetic linear synchronous motor(PMLSM),put forward a speed and position estimation method based on modified unscented Kalman filtering(UKF)to estimate moving speed and position.Compared to conventional UKF algorithm,the modified UKF algorithm improves at obtaining of sampling point.It uses spherical sampling strategy for obtaining sample points,rather than traditional square root symmetric sampling strategy.It greatly reduces number of sampling points,and reduce calculation of state estimation process.When the estimation properties are equivalent,the modified spherical sampling strategy UKF algorithm is better than the traditional square root symmetric sampling UKF algorithm in permanent magnet linear synchronous motor sensorless real-time control system has obvious advantages and obtain good control effect.
permanent magnet linear synchronous motor(PMLSM); modified unscented Kalman filtering(UKF); sensorless control
10.13873/J.1000—9787(2017)02—0158—03
2016—03—04
國家自然科學基金資助項目(61203113); 浙江省自然科學基金資助項目(LY15F03001)
TM 341; TP 13
A
1000—9787(2017)02—0158—03
王桂榮(1975-),女,工學博士,副教授,從事嵌入式系統的開發與應用、交流電機驅動控制工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
