立式扭矩傳感器磁場與輸出電壓分析
2017-02-18 06:15:58郭艷玲常子凡那少聃
傳感器與微系統 2017年2期
關鍵詞:磁場
郭艷玲, 常子凡, 那少聃
立式扭矩傳感器磁場與輸出電壓分析
郭艷玲, 常子凡, 那少聃
(東北林業大學 機電工程學院,黑龍江 哈爾濱 150040)
扭矩傳感器是汽車電動助力轉向(EPS)系統中的核心部件,基于電磁感應原理提出了一種新型扭矩傳感器。介紹了傳感器的結構和工作原理,運用電磁場理論推導了立式扭矩傳感器的磁場計算公式和輸出電壓數學模型。采用Ansoft Maxwell對傳感器的電磁感應系統進行了建模仿真,仿真結果表明:氣隙磁場強度沿圓周方向呈類似方波分布,輸出電壓信號類似于正弦曲線,磁場分布和輸出電壓的仿真結果與理論計算吻合。
扭矩傳感器; 電磁感應; 數學建模; Ansoft Maxwell仿真
0 引 言
扭矩傳感器是電動助力轉向系統(EPS)的關鍵部件之一。EPS控制器根據接收到的扭矩傳感器信號控制助力執行裝置產生合適的轉向助力。國內外現有的EPS采用的扭矩傳感器主要有日本JTEKY公司的霍爾式傳感器、韓國KIA公司的電位計式傳感器以及Hella公司的電磁感應式傳感器[1]。其中電磁感應式扭矩傳感器,以其結構簡單,不受磁場和電信號干擾,不需要額外的磁性材料,不需要溫度補償[1]等優點,成為EPS扭矩傳感器主要發展方向之一。
由于Hella公司的扭矩傳感器采用的平面電磁感應結構,由一個PCB定子和兩個花瓣狀沖壓金屬片轉子上下布置組成[2],占用空間較大。同時為了避免內部磁場間的干擾,設計上下結構不同,加工工藝較復雜。基于以上考慮,本文采用柔性電路板(FPC)技術,設計一種扭矩傳感器將原傳感器圓形平面結構變成同軸立體圓柱結構,從而有效減小傳感器整體體積,同時避免了傳感器內部可能存在的相互干擾[3],獲得國家實用新型專利(CN201520963725.0)。
1 傳感器的結構與工作原理
立體傳感器整體為“內轉子+FPC”結構,模型見圖1。內部轉子分為上下轉子齒片,結構尺寸完全一致,分別固定在EPS輸入軸和輸出軸上。齒片和空隙交替均勻分布,設轉子齒片數量為N。外部FPC中間為螺旋勵磁繞組,兩端為接收繞組,且勵磁繞組作為外部電路的電感元件與處理電路共同形成閉合回路。接收繞組如圖2所示,為2N個菱形正反回路構成的環形結構。外部FPC連同處理電路安裝在專用的骨架和支座上。當對勵磁繞組通入高頻正弦勵磁電流時,由于渦流耦合作用,在轉子片中會產生較大的同頻率的渦電流[4],這些渦電流會產生磁場,其方向與原磁場方向相反,對原磁場起到削弱作用,即去磁效應[5],導致氣隙間的磁場分布不在均勻。因此隨著轉子的移動,接收繞組正反回路磁通量變化將引起接收繞組中感應電壓幅值發生相應的變化[2]。當轉子齒片轉過一個正反回路,輸出感應電壓相位從0°~360°變化,得到轉子轉角與感應電壓幅值的關系。通過測量扭桿兩橫截面的相對扭轉角,并利用材料力學中轉角與扭矩成正比的原理可以計算得到扭桿所受扭矩[5]。
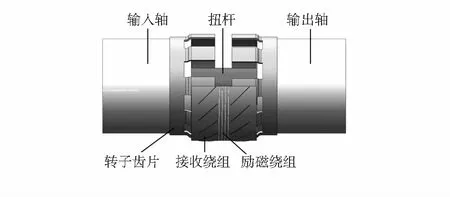
圖1 立體磁電式扭矩傳感器半剖結構圖
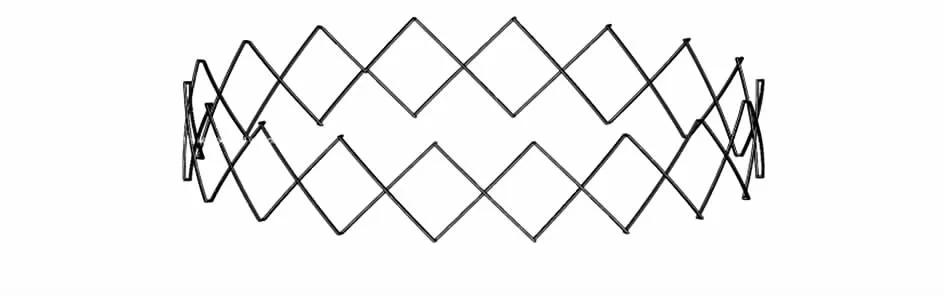
圖2 接收繞組繞線樣式
2 傳感器磁場系統的理論計算
為了便于建立扭矩傳感器中勵磁繞組磁場及渦流場的數學模型,現假定如下:
1)轉子齒片安裝在EPS轉向管柱上,在此忽略傳感器系統內各部分電磁感應與金屬管柱以及與金屬管柱緊配合的轉子圓環的耦合現象,即將轉子片簡化為沿圓周方向均布的矩形齒片。
2)由于接收繞組產生的感生電壓和遠小于勵磁電壓,因此,忽略感生電流對勵磁磁場和渦流磁場的影響。
3)由轉子齒片渦電流產生磁通只分布在轉子齒片對應的矩形區域內,不考慮漏磁情況。
4)由于轉子齒片與接收繞組間氣隙較小,可以認為在有效氣隙內磁場強度沿徑向均勻分布。
2.1 勵磁繞組磁場計算
(1)
由于勵磁繞組為無鐵芯FPC印刷繞組,且R?L,所以,由勵磁電流所產生的時變磁場主要集中在繞組周圍,不適合使用磁路計算方法。在圓柱三維磁場中,只有沿徑向磁場Br對轉子齒片的的電磁感應現象有貢獻,即轉子齒片電渦流主要由Br產生。考慮到AnsoftMaxwell對其進行三維仿真時通常采用直角坐標系進行描述,所以,對傳感器建立以軸線為z軸的直角坐標系,由于傳感器電磁系統具有軸對稱性,故取yoz平面進行計算。如圖3所示。
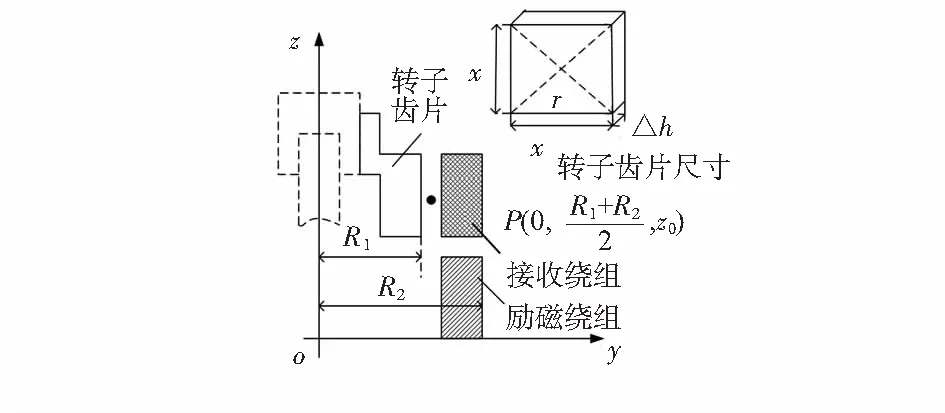
圖3 傳感器位置圖
(2)
(3)
利用Mathematica積分計算徑向電磁感應強度可知[7],當y軸固定時,Br在一定范圍內沿z軸成線性分布,取P點磁場場量作為轉子齒片有效氣隙內磁感應強度的均值,即Bs=Br。
2.2 轉子齒片渦流磁場計算
立體扭矩傳感器的主要原理是利用轉子齒片的渦流效應,其中轉子齒片的渦流電動勢為εe=εj+εd。其中εj是由導體在時變磁場中因磁通變化產生的感生電動勢,εd是導體作切割磁感線運動而產生的動生電動勢。將轉子齒片與接收繞組相對應的圓弧區域簡化為邊長為x的正矩形,則當轉子片隨輸入軸以轉速n轉動時
(4)
(5)
式中x為轉子齒片正矩形邊長,m;v為轉子片的轉動線速度,m/s,v=2πR2n;n為轉子轉速,r/s。
矩形轉子齒片電阻為
(6)
式中 ρ為轉子片的電阻率,Ω·m;r為矩形外接圓半徑,m;Δh為電流等效透入深度,m。
則轉子齒片區域上的電渦流為
(7)
通過電磁學中的研究可知[7]:在高頻交變磁場中,渦流的電流密度J在轉子齒片內并不是均勻分布的,而是隨深度增加按指數規律衰減[8],渦流密度減少到導體表面渦流密度的1/e,即大約37 %的對應的深度[9]稱作透入深度,渦流電流主要分布在轉子片靠近勵磁繞組一側的表層中。工程計算中采用等效透入深度Δh來計算。
轉子片在高頻交變磁場下,其透入深度為
(8)
式中 δ為導體材料電導率,S/m;μ為導體材料的磁導率,H/m。
通過分析渦流分布形式,利用電磁感應定律可以得到渦電流磁場在有效氣隙內的磁感應強度Be。
2.3 接收繞組感應電壓
在假設條件(2)下,轉子齒片對應位置氣隙的磁場強度B為勵磁繞組勵磁Bs和轉子齒片產生渦流去磁Be共同作用的結果[5],即B=Bs-Be,轉子氣隙對應位置磁場為原磁場B=Bs。在計算接收繞組感應電壓時,當轉子片隨EPS管柱轉動一定角度時可以看作是轉子不動,接收繞組繞軸線轉動某一角度,即可以看作氣隙磁場的分布形式和大小都將不變,只是相對于接收繞組的位置發生改變。將立體圓柱結構展開成平面結構,繪制接收繞組與氣隙磁場相對位移示意圖,如圖4所示。縱坐標為氣隙磁場強度,橫坐標為周向磁場分布。接收繞組中點代表正回路,叉代表反(負)回路,回路面積為S。
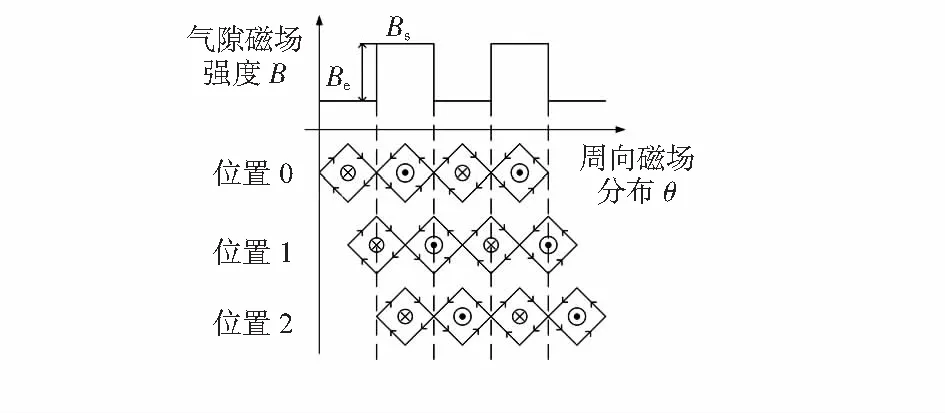
圖4 傳感器轉角示意圖
3 電磁仿真分析
3.1 靜態時的磁場分布
本文通過使用電磁場分析軟件AnsoftMaxwelll對所設計的扭矩傳感器進行建模仿真[10]。因為傳感器采用上下對稱結構,為簡化分析過程,保留模型上半部分,且勵磁繞組半徑R1=15mm,長度L=5mm,單位長度線圈匝數m=10,通入勵磁電流I=100mA,頻率f=4MHz,轉子齒片半徑R2=14.25mm,轉子齒片個數N=9。在傳感器氣隙內建立以軸線為中心,半徑為r=14.8mm的圓柱形面域,分析氣隙內磁場的分布狀態,如圖5所示。通過仿真結果可知,由勵磁繞組產生的磁感應強度在繞組附近最強,沿著軸線方向遞減,轉子齒片對應位置的磁感應強度明顯減小。
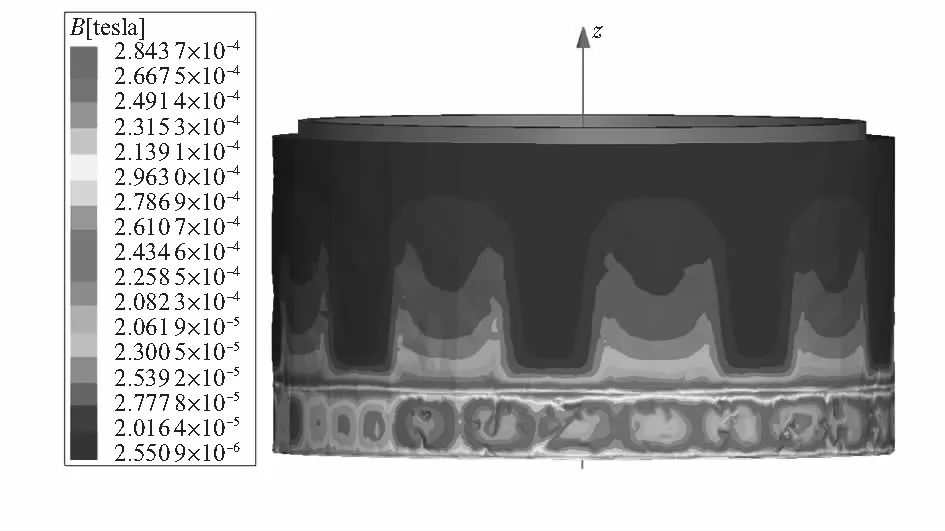
圖5 r=14.8 mm面域磁感應強度云圖
取過轉子齒片中心點處的圓周路徑進行場量分析,得到此路徑磁感應強度曲線,如圖6所示。可知磁場在圓周路徑上近似呈方波分布,且由勵磁繞組產生的磁感應強度均值為65μT,而轉子齒片對應位置的磁場最小為7.5μT,說明由轉子齒片的渦流去磁效應十分明顯。仿真曲線與2.2中計算曲線偏差主要是由轉子齒片以及與連接齒片的轉子圓環漏磁導致的。
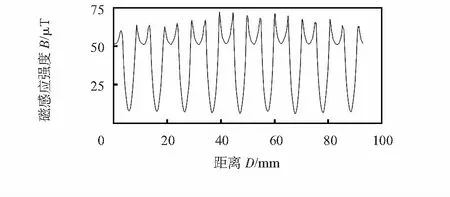
圖6 r=14.8 mm路徑磁感應強度
3.2 動態時輸出電壓分析
采用瞬態磁場對傳感器電磁系統進行動態仿真。對齒片轉子施加旋轉驅動,使用外加電路,由于電腦設備限制,為了輸出較為直觀的波形,設定齒片轉子的轉速為常量n=3 700r/s,仿真時間為轉子齒片在此轉速下的旋轉過1.5個回路區間(轉角θ=60°)的時間,即stoptime=9μs。接收繞組輸出電壓的仿真結果如圖7所示,當齒片轉子勻速轉動,接收繞組輸出電壓為高頻感應電壓[11],其頻率與原電壓頻率相同,其幅值隨轉子齒片與繞組回路相對位置變化做呈正弦變化,電壓峰值為19mV。
4 結 論
仿真結果表明:設計的立體扭矩傳感器中轉子齒片的渦流去磁效應十分明顯,當轉子隨輸入扭矩轉動時,菱形
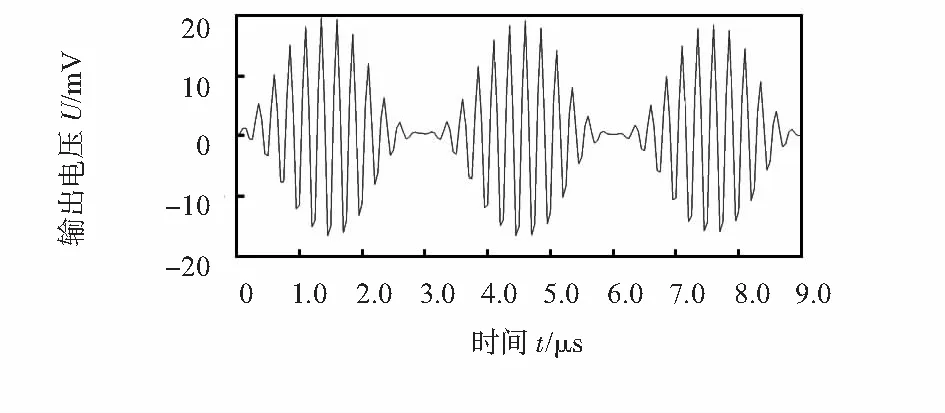
圖7 接收繞組輸出電壓
繞組輸出電壓為高頻正弦信號,幅值與轉子轉速相關。仿真結果與理論計算值基本一致,對傳感器整體結構尺寸設計及信號后處理具有一定指導意義。
[1] 石延平,陳季萍,周慶貴.一種新型磁電感應式動態非接觸扭矩傳感器[J].儀表技術與傳感器,2010(5):3-6.
[2] 方玉良.用于EPS的電磁感應式扭矩傳感器研究[D].哈爾濱:東北林業大學,2014.
[3] 李志鵬,常子凡,那少聃.立式非接觸電磁感應扭矩傳感器:中國,CN2015209637250.0[P].2016—02—29.
[4] 祝長生.時變磁場下徑向電渦流阻尼器的動力特性[J].機械工程學報,2009(8):31-36.
[5] 衣豐艷,徐 剛,于明進,等.發動機電渦流緩速器制動力矩的計算[J].機械設計與研究,2009(4):40-43.
[6] 歐大生,張劍平,秦建文.磁電相位差式轉矩測量技術研究[J].電子測量技術,2007(4):100-103.
[7] 惠小強,陳文學.有限長通電螺線管空間的磁場分布[J].物理與工程,2004(2):22-23,25.
[8] 張曉燕,季學武.電磁感應式轉向盤轉速傳感器的研究[J].儀器儀表學報,2009(12):2551-2556.
[9] 李 凌,楊 明,葉 林.感應式非接觸角度傳感器電磁耦合系統設計[J].傳感器與微系統,2011,30(10):130-132,140.
[10] 吳 畏,聶魯燕,馬利民,等.Ansoft Maxwell電磁場分析在短路匝傳感器輸出特性中的應用[J].傳感器與微系統,2011,30(6):131-134.
[11] Hiroyui Wakiwaka,Muneo Mititamua.New magnetostrictive type torque sensor for steering shaft[J].Sensors and Actuators A: Physical,2001,911:915.
DOI:10.13873/J.1000—9787(2017)02—0025—03
Magnetic field and output voltage analysis of 3D torque sensor
GUO Yan-ling, CHANG Zi-fan, NA Shao-dan
(College of Electromechanic Engineering,Northeast Forestry University,Harbin 150040,China)
Torque sensor is a core component of automotive electric power steering(EPS)system,a new kind of torque sensor based on electromagnetic induction principle is proposed.Structure and working principle of the sensor are introduced.Calculation formula of magnetic field and mathematic model for output voltage are deduced with the theory of electromagnetic field.Electromagnetic induction system of sensor is modeled and simulated by using Ansoft Maxwell.The simulation result reveal that the magnetic field of circumferential air-gap similar to square wave and the output voltage signal is similar to sine curve,the simulation result of magnetic field distribution and the output voltage are consistent with the theoretical calculation.
torque sensor; electromagnetic induction; math modeling; simulation of Ansoft Maxwell
10.13873/J.1000—9787(2017)02—0018—03
2016—03—29
TP 212
A
1000—9787(2017)02—0018—03
郭艷玲(1962-),女,教授,主要從事機電一體化應用技術研究工作。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
