一種基于聯邦卡爾曼濾波的信息融合定位算法
2017-02-14 09:26:40吳延昌趙
網絡安全技術與應用 2017年1期
◆吳延昌趙 敏
(1.中國礦業大學物聯網研究中心 江蘇 221008; 2.平頂山工業職業技術學院物聯網研究中心 河南 467000)
一種基于聯邦卡爾曼濾波的信息融合定位算法
◆吳延昌1,2趙 敏2
(1.中國礦業大學物聯網研究中心 江蘇 221008; 2.平頂山工業職業技術學院物聯網研究中心 河南 467000)
本文設計了一種基于聯邦卡爾曼濾波的WLAN系統與RFID系統聯合定位的信息融合算法。針對室內移動節點單一定位系統存在的定位精度不夠、定位時間過長及算法復雜度不理想等問題,提出將WLAN系統和RFID系統作為聯邦濾波器的兩個獨立子系統,采用無跡卡爾曼濾波算法進行獨立的量測更新和時間更新,主濾波器用無反饋模式對子系統輸出的信息進行融合。仿真結果表明,該算法分散和減少了無跡卡爾曼濾波的計算量,較之于單一定位系統,大幅減少了最大偏差和最小偏差,定位精度顯著改善。
聯邦卡爾曼濾波; WLAN系統; RFID系統; 定位算法; 融合算法
0 前言
隨著移動終端設備數量的增加和智能化程度的提高,定位技術[1]作為各種移動應用的核心支撐功能,受到研究者的高度重視。目前常見的室內定位技術有超聲波定位技術、WLAN定位技術、Zigbee定位技術[2]、紅外線定位技術和RFID定位技術[3]等。但是在實際應用中單一的定位技術很難取得滿意的應用效果,因此多傳感器信息融合技術[4][5]已成為室內移動節點定位研究領域的重要課題之一。
WLAN定位技術近年來得到快速發展,目前主要包括依據采集分析接入點的信噪比或是信號質量的Nibble系統[6],利用接收AP的信號強度定位的WHAM!定位系統[7]、Ekahau 定位系統[8]、Horus 定位系統[9]和 Rice 系統。而RFID系統因為其非視距和非接觸等優點備受關注,雖然定位時間較短、精度較高但是定位范圍受限于發射器和接收器之間的距離。本文基于聯邦卡爾曼濾波實現WLAN定位系統和RFID定位系統的信息融合,可以有效提高移動節點的定位精度和實時性,具有一定的實用價值。
1 理論基礎
1.1 聯邦卡爾曼濾波模型
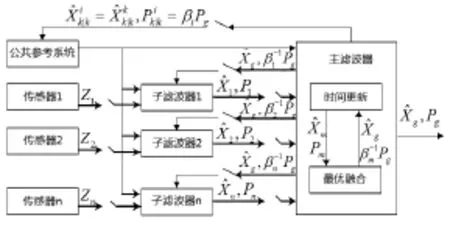
圖1 聯邦濾波器的一般結構
傳統卡爾曼濾波技術面向多傳感器數據融合的方法一般包括集中式卡爾曼濾波和分散化卡爾曼濾波。而Carlson[10]提出的聯邦濾波器因其計算量小、容錯性能好且設計靈活,取得了較好的實際應用效果。
基于聯邦卡爾曼濾波的融合算法又分為各子濾波器估計不相關時的融合算法和各子濾波器估計相關時的融合算法。由于在實際使用中無法保證各個子濾波器是局部不相關的前提,因此本文主要研究各子濾波器的估計相關時的融合算法,采用方差上界技術將濾波算法進行變換,從而使得各子濾波器局部估計從相關變成不相關狀態。
如圖1所示,聯邦濾波器是一種兩級濾波結構。假設各子濾波器的狀態估計可以表示為式中是各子濾波器的公共狀態cX的估計,是第i個濾波器專有的狀態估計。
1.2 聯邦卡爾曼濾波器的流程設計
一般情況下,聯邦濾波器的工作流程主要包括信息分配、信息的時間更新、信息的量測更新和信息融合這四個過程。
第一步,進行信息分配,確定主濾波器與各個子濾波器之間信息分配的比例系數,如式(1)。表示系統的過程信息。

在式(1)中,參數iβ被稱為信息分配系數,滿足條件0iβ>及式(2)的分配原則。

第二步,進行信息的時間更新。該過程分別在主濾波器和各個子濾波器之間獨立進行,并采用相同的濾波算法,見式(3)。

第三步,進行信息的量測更新。該更新在系統各子濾波器中進行,而主濾波器不需要進行該步驟。各子濾波器的量測更新算法見式(4)。

第四步,進行信息融合。將各子系統的局部估計信息按照設定的算法公式進行融合計算,以得到估計全局最優。該步工作位聯邦濾波器的核心環節,融合算法見式(5)和(6)。
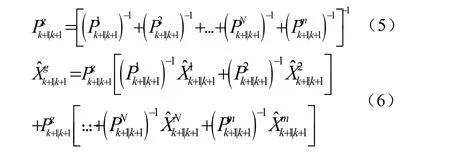
經過上述四步的流程設計,雖然因為方差上界技術導致的信息局部丟失,但是在信息融合過程中這種非最優性又被重新合成,在全局方程上最終獲得了最優解。
2 AN/RFID信息融合定位算法
基于WLAN系統和RFID系統聯合定位的信息融合算法中,聯邦濾波器由一個主濾波器和兩個子系統組成,如圖2所示。為兩個子濾波器輸出的狀態估計值;1P、2P分別為兩個子濾波器的協方差陣和gP為聯邦濾波器的最優估計值和協方差陣。
子系統WLAN和子系統RFID分別采用無跡卡爾曼濾波算法進行獨立的量測更新和時間更新,量測信息在子系統內并行處理。主濾波器用無反饋模式對子系統輸出的信息進行融合,從而獲取高精度的定位信息。
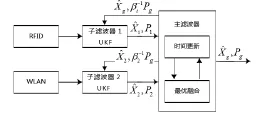
圖2 RFID/WLAN融合定位結構簡圖
2.1 系統狀態方程
系統移動節點的定位是在二維平面內進行,因此公共狀態變量X取為:

其中,xs和ys分別表示移動節點在橫坐標X方向和縱坐標Y方向的位置,xv和yv分別表示移動節點X和Y方向的速度。
兩個子濾波器為:

其中,W表示WLAN系統誤差,V表示RFID系統誤差。
2.2 系統的觀測方程
子濾波器的觀測方程分別表示為:
2.3 WLAN和RFID的信息融合
由于WLAN系統和RFID系統相互獨立工作,互不影響,因此在圖2所示的聯邦濾波器中,信息融合算法的第一步信息分配時,取公共參考系統的系數mβ為0,在計算時,不需要進行濾波計算,只需要進行兩個子系統的信息綜合,同時將主濾波器的估計值設定為全局估計。主濾波器的算法表示如下:

信息融合中主濾波器的全局估計,由各個子濾波器狀態向量估計融合后獲得。子系統的分配系數iβ不同,其在主濾波器輸出中的權重就不同。但是,雖然主濾波器對子濾波器的利用權重由于iβ不同而不同,但仍然利用了各子系統的所有信息,其融合后的最優性與iβ無關。本文通過實驗驗證了這一結論,如表1所示,分別取WLAN子系統的分配系數為0.9,0.1,0.5,RFID子系統的分配系數為0.1,0.9,0.5,主濾波器的分配系數均為0。實驗結果表明,信息分配系數對主濾波器的融合結果影響較小。
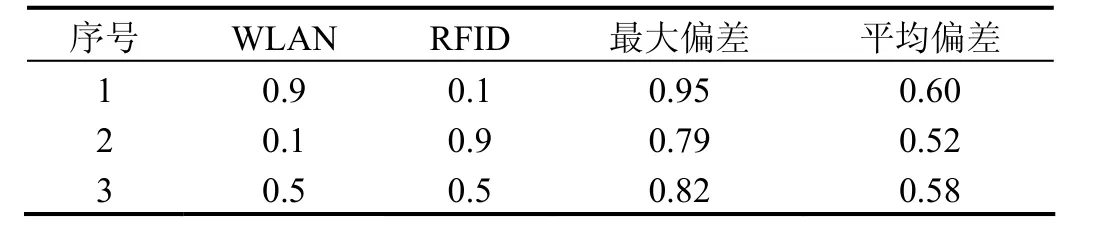
表1 實驗結果對比表
3 仿真結果分析
融合算法的仿真實驗在物流實驗室進行,室內封閉空間,15m×10m,面積約150m2。以實驗室內AGV小車攜帶移動節點,共進行了三組實驗,實驗過程如下。
3.1 實驗環境搭建
三組實驗分別為WLAN系統單獨定位實驗,RFID系統單獨定位實驗,WLAN/RFID聯合定位實驗。WLAN系統由3個路由器組成,分別用W1、W2、W3表示,路由器保持和移動節點的無線網卡在同一平面內。RFID系統采用7個RFID標簽來進行實驗,分別表示為R1、R1…R7,讀寫器由移動節點攜帶。人為在實驗室內劃分0.5m*0.5m的單元格,并建立坐標體系。實驗時,路由器和RFID標簽的坐標分別為:W1(3.0m,1.0m), W2(1.0m,4.0m),W3(5.5m,6.0m),R1(2.5m,0.5m),R2(0.5m,1.5m),R3(0.5m,4.5m),R4(2.0m,6.0m),R5(5.0m,6.0m),R6(5.5m,4.0m),R7(4.0m,3.0m)。在實驗時,分別選取一部分點作為實驗的采樣節點。
移動節點在二維平面內按照預設路徑做四段連續的直線軌跡運動,起始節點為(4m,0m),運動時間為240秒沿預設路徑以0.02m/s勻速前行。信息融合算法中,采樣時間間隔為33s,
3.2 實驗結果分析
三組實驗的結果如表2所示。圖3為實驗結果的綜合比較圖。實驗結果表明,采用聯邦濾波結構構造的信息融合系統,分散和減少了無跡卡爾曼濾波的計算量,WLAN/RFID聯合信息融合定位算法比較于單獨的WLAN系統定位、RFID系統定位,最大偏差分別減少了52.72%、42.86%,最小偏差分別減少了71.74%、62.86%,定位精度顯著改善。

表2 三組實驗結果對比表
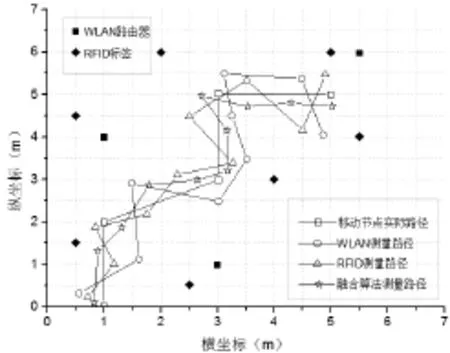
圖3 三組實驗結果比較圖
4 結束語
隨著移動網絡技術的發展和“互聯網+”應用的不斷豐富,移動定位技術作為核心支撐,已經取得了一定的研究成果,但是還無法滿足某些場合或者條件下,存在的種種客觀條件的制約。本文設計了一種基于聯邦卡爾曼濾波的信息融合定位算法。該算法在不增加算法復雜度的前提下,有效提升了單一定位系統的定位精度和實時性。仿真實驗結果也表明,該算法在移動定位中是一個高效的定位信息融合算法。
參考文獻:
[1]曹永升,梁勝祥,謝冠恒,鄭喜艷,趙書俊.移動定位技術的現狀與發展趨勢[J].電子技術應用,2015.
[2]胡慶新,程陣.基于ZigBee的無線傳感器網絡定位系統的設計[J].電子技術應用, 2009.
[3]張穎,李凱.基于RFID技術的多標簽定位系統設計[J].電子技術應用,2012.
[4]吳延昌,張佰慧.基于Zigbee和RFID的施工現場智能監控系統設計[J].煤礦機械,2015.
[5]吳延昌,王洪.物聯網感知技術在危險源預警系統中的應用[J].工礦自動化,2013.
[6]P.Castro,P.Chiu,T.Kremenek,R.Muntz.A probabilist-ic room location service for wireless networked enviro-nments [C].In Proceedings of the 3rd International Confe-rence on Ubiquitous Computing (UbiComp),Georgia, U-SA,2001.
[7]D.L. Lee,Q.Chen.A model-based WiFi localizationme thod[C]. In:Proceedings of Infoscale.2007.
[8]S.C.Yeh,Y.Chiou,Y.J.Peng.A research for indoor LBS technology based on RSSI prediction model[J].Jou-rnal of Inf ormatics & Electronics,2006.
[9]M.Youssef,A.Agrawala.Handling samples correlate-on in the horus system[C].In IEEE Infocom,2004.
[10]N.A.Darlson,M.P.Berauducel.Federated kalman filter simulation results[J].Navigation,1994.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
電源技術(2016年9期)2016-02-27 09:05:39