電動機拖動的啟閉機荷重開度檢測系統研究
2017-02-08 01:16:41喬愛民何博俠羅少軒黃迎輝王艷春
農業機械學報 2017年1期
喬愛民 何博俠 羅少軒 黃迎輝 王艷春
(1.蚌埠學院電子與電氣工程學院, 蚌埠 233000; 2.南京理工大學機械工程學院, 南京 210094)
電動機拖動的啟閉機荷重開度檢測系統研究
喬愛民1何博俠2羅少軒1黃迎輝1王艷春1
(1.蚌埠學院電子與電氣工程學院, 蚌埠 233000; 2.南京理工大學機械工程學院, 南京 210094)
荷重開度一體式傳感器安裝在電動機輸出軸與啟閉機的動力輸入軸之間,可以輸出包括啟閉機實際負載引起的總力矩及用于開度檢測的計數脈沖等電信號,同時起到聯軸器的作用。通過次級旋轉的變壓器耦合及光電耦合方法分別實現了傳感器內部旋轉電路的供電及總力矩與開度脈沖等電信號的非接觸傳輸。為了從一體式傳感器輸出的總力矩信號中獲取啟閉機的實際負載,荷重檢測分為2個階段,首先利用灰色關聯校正環節對傳感器內部彈性軸所受總力矩對應的模數轉換(ADC)輸出值進行校正,將獲得的趨于穩定的ADC校正值作為第1階段實際輸出值,并將該輸出值作為輸入變量,在第2階段,分別利用最小二乘支持向量回歸(LS-SVR)和偏最小二乘回歸(PLSR)方法實現對啟閉機負載的回歸預測,再通過灰色關聯校正環節對該負載預測值進行校正得到最終的啟閉機實際負載。試驗結果表明,結合灰色關聯校正方法,采用LS-SVR的啟閉機實際負載回歸誤差在±0.6%范圍內,利用PLSR的啟閉機負載回歸誤差在±1%范圍內。同時,由于荷重開度一體式傳感器與電動機輸出軸直接連接,在啟閉機升降過程中,輸出的開度計數脈沖數增加,提高了開度檢測分辨率,實際開度分辨率遠小于1 mm。
啟閉機; 荷重開度; 檢測系統; 電動機拖動
引言
啟閉機類型可分為:液壓啟閉機、卷揚式啟閉機、螺桿啟閉機等[1-6],其中后2種為電動機拖動型,是許多農田水利工程中必不可少的設備[3-4]。近年來,我國在各地農田水利工程中推進現地自動控制、遠程監控、定量供水以及智能化管理系統等建設[1,5],在這些啟閉機應用工程中,荷重和開度檢測是非常重要的環節。目前,固定卷揚式啟閉機的荷重和開度檢測分別采用荷重傳感器和多圈絕對值型編碼器實現,2種傳感器安裝在不同位置,且荷重檢測傳感器安裝和維護時需要脫開閘門及輥筒等重型負載,不便于安裝和維護;螺桿式啟閉機的荷重檢測則一直沒有很好的解決方案,目前很多螺桿式啟閉機應用工程中,由于沒有荷重檢測,常出現因為啟閉機負載過大而導致螺桿頂彎等事故的發生[4-5],文獻[1]提出了一種基于通過蝸桿的來回間隙攢動,帶動曲軸機構的扭轉來檢測閘門實際荷重,但存在著較大的缺陷。本文研究一種電動機拖動的啟閉機荷重開度檢測系統。
1 啟閉機荷重開度檢測方法
1.1 啟閉機荷重開度信息的獲取方法
啟閉機的荷重和開度信息由荷重開度一體式傳感器獲取,傳感器安裝在電動機輸出軸及啟閉機的動力輸入軸之間,圖1為電動機拖動的啟閉機安裝一體式傳感器的示意圖。傳感器內部彈性旋轉軸上貼有電阻應變片并將之組成惠斯登電橋,可將啟閉機工作時作用于彈性軸上的總力矩近似按線性規律轉換為標準的變送信號,同時輸出開度計數脈沖用于對啟閉機開度檢測。由圖1可知,荷重開度一體式傳感器同時起到聯軸器的作用,安裝及后期維護非常方便。
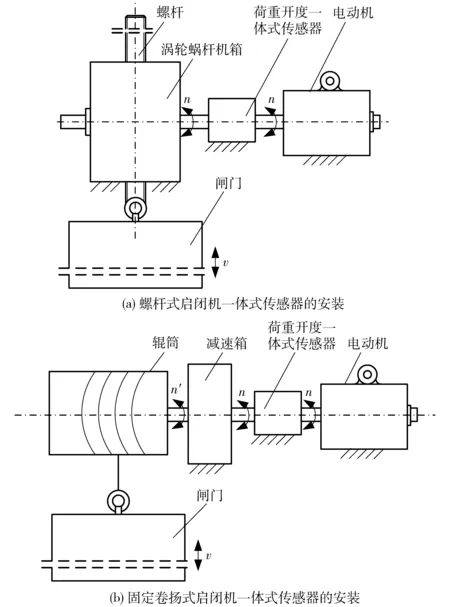
圖1 荷重開度檢測傳感器安裝示意圖Fig.1 Diagram of hoist installed with sensor of load and opening
1.2 啟閉機荷重開度檢測需要解決的問題
(1)如圖1所示,荷重開度一體式傳感器的外殼固定,荷重檢測主要通過對傳感器內部彈性軸上的電阻應變片及其電橋輸出的總力矩電信號變換實現,開度是通過結合傳感器輸出的開度計數脈沖數及啟閉機的相關參數間接計算得到,而彈性軸相對于外殼旋轉,部分力矩信號變換電路和開度計數脈沖產生電路固連于彈性軸上并與之同時旋轉,將荷重和開度相關的總力矩及開度計數脈沖等電信號實現非接觸傳輸是必須要解決的首要問題。
(2)由于荷重開度一體式傳感器安裝在啟閉機的動力輸入端,輸出的總力矩信號既包括啟閉機工作過程中實際負載引起的力矩,也包括了機構本身的摩擦力等其他因素在啟閉機工作過程中產生的附加力矩,而附加力矩具有波動性及隨機性,從荷重開度一體式傳感器的輸出總力矩信號中獲取啟閉機的實際負載是另一個需要解決的關鍵問題。
2 荷重開度一體式傳感器工作原理
2.1 荷重開度一體式傳感器結構
圖2為一體式傳感器的原理和結構簡圖。傳感器的供電電源為直流24 V,采用旋轉變壓器耦合的方法解決和彈性軸同時旋轉的電橋等電路供電問題。傳感器的端蓋、外殼、彈性軸及軸承等都是具有導電導磁性能的金屬材料,作為旋轉變壓器的導磁磁芯,變壓器的初級線圈與外殼固定,次級固定在彈性軸上和彈性軸一同旋轉。由振蕩電路給初級線圈提供占空比為50%的恒定頻率脈沖電源,在初級的激勵之下,旋轉變壓器次級產生具有一定帶載能力的脈動直流電源,經過整流及穩壓后獲得穩定的直流電源,供電橋及與彈性軸同時旋轉的電路供電。

圖2 荷重開度一體式傳感器工作原理及機構示意圖Fig.2 Principle and structure diagrams for integrate sensor of load and opening for hoist1.端蓋 2.變壓器初級驅動電路板 3.旋轉變壓器初級 4.旋轉變壓器次級 5.外殼 6、15.擋圈 7.光電開關 8、18.紅外接收板 9.軸承 10.彈簧墊 11.彈性軸 12、13.紅外發射板 14.紅外發射管 16、19.光電開關 17.紅外接收管

圖3 彈性軸及電阻應變片貼片示意圖Fig.3 Diagram of flexible shaft stuck with resistance strain gauge
一體式傳感器通過其彈性軸連接電動機與啟閉機,在彈性軸上貼有8片金屬電阻應變片,用于感應彈性軸所受的總力矩,由應變片組成的電橋將總力矩線性變換為毫伏信號,通過幅值放大及電壓/頻率(V/F)轉換為頻率信號驅動紅外二極管發射脈沖頻率紅外光,在與傳感器端蓋固定的紅外接收板上,焊接多個紅外接收三極管,均勻分布在與紅外二極管同直徑的圓周上用于接收紅外二極管發出的脈沖紅外光,經過頻率電壓(F/V)轉換將之轉換為0~5 V的電壓信號對外輸出。
圖2中的擋圈最外端制成齒數為60的齒狀,并與可旋轉的紅外發射板固定在一起,在紅外接收板上按圖3焊接2個光電開關。當電動機旋轉時,擋圈轉動,2個光電開關輸出脈沖信號,由變換電路對該脈沖信號進行處理,最終得到彈性軸每旋轉一圈可產生60個具有旋轉方向辨別功能的開度計數脈沖輸出。
2.2 荷重和開度信號變換及非接觸傳輸
2.2.1 荷重信號變換及傳輸
(1) 總力矩信號變換
啟閉機在升降過程中,其負載及其他因素引起的總力矩可等效為啟閉機動力輸入端的總力矩Mz,電動機提供的動力矩設為Md,當彈性軸轉速為n恒定時,有Md=Mz。
為簡化分析,假定彈性軸為內外徑恒定的空心軸,根據材料力學可知,與軸線方向為±45°的軸外表面受到的應力為最大值和最小值,且方向相反,即一個受拉力,另一個受壓力[7]。圖3中的R1~R8為金屬應變片,沿軸中心線呈±45°方向貼片。按照圖3的布片方式,根據惠斯登電橋的組橋原則將應變片組成差動電橋,工作時各應變片的電阻變化量基本相同,并設各應變片原始電阻相等,當彈性體如圖3受力時,根據電阻應變效應,可得到電橋輸出與總力矩之間的關系式為
(1)
式中E——彈性軸的彈性模量μ——泊松比S——電阻應變片的靈敏度系數Ui——電橋電源電壓Uo——電橋電壓輸出
由式(1)可知,總力矩與電橋的輸出為線性關系。
(2)總力矩信號的非接觸傳輸
總力矩的信號變換及紅外發射電路位于可旋轉的紅外發射電路板上,紅外發射電路板上的電路供電由旋轉變壓器的次級輸出經整流濾波后得到的穩定直流電源提供。為實現與總力矩對應的電信號非接觸傳輸,先對其進行幅值放大再進行V/F轉換,由頻率信號驅動紅外光電二極管輸出脈沖頻率紅外光信號,其電路見圖4。

圖4 總力矩信號V/F轉換及紅外發射電路Fig.4 Circuit of V/F conversion for total torque and infrared emission
利用儀器放大器AD620對電橋輸出的差動毫伏信號進行放大,當電橋平衡時,AD620輸出2.5 V。由芯片AD537將AD620的輸出電壓轉換成頻率信號,并驅動三極管Q1使紅外發射二極管DS1~DS7發射脈沖頻率紅外光,其頻率Fout和電橋輸出電壓之間的關系為
(2)
調節電位器Rz和Rg,使得當總力矩為0時輸出頻率為10 kHz,最大正向總力矩對應頻率為15 kHz,最大負向總力矩對應的頻率為5 kHz。
紅外接收三極管Q1~Q12按圖2所示均勻焊接在紅外接收板上,用于接收紅外二極管發射的脈沖頻率紅外光信號,并對紅外三極管輸出信號進行整形、F/V變換等處理,其電路見圖5。

圖5 總力矩信號紅外接收及F/V轉換電路Fig.5 Circuit of infrared receiving and F/V conversion for total torque
紅外接收板與可旋轉的紅外發射板之間保持一定距離,紅外三極管Q1~Q12均勻排列在如圖2所示的圓周上,可保證紅外發射板在旋轉過程中紅外三極管能可靠接收到脈沖頻率紅外光。圖5中,由U5、R12和C13組成的單穩態觸發器對紅外三極管的輸出信號進行整形,并由LM331實現F/V轉換,再通過AD620將其變換為標準的0~5 V信號。圖5中的電壓輸出Vout與脈沖紅外光的頻率Fout之間的關系為
(3)
式(3)中電壓輸出可通過電位器Rz及R13調節,使得0 V對應彈性軸受到最大負向總力矩,2.5 V對應彈性軸空載狀態,5 V對應彈性軸受到最大正向總力矩。
2.2.2 開度信號變換及傳輸
可旋轉的擋圈相對光電開關運動可產生開度計數脈沖輸出,擋圈與光電開關的焊接與布置見圖2。電動機旋轉時帶動擋圈旋轉,通過與齒頂齒槽等寬的擋圈配合,每個光電開關輸出等間距的脈沖。為了辨別電動機的旋轉方向,2個光電開關安裝在開度脈沖信號相隔1/4周期處[8],并對兩路脈沖信號分別進行整形,結合辨向電路實現對彈性軸旋轉方向的辨別。

圖6 開度計數脈沖信號變換電路Fig.6 Conversion circuit of pulse signal for opening detection
由圖6可知,當紅外發射板相對紅外接收板逆時針旋轉時,順時針計數脈沖CW輸出始終為低電平,逆時針計數脈沖CCW有脈沖輸出;反之則CW有脈沖輸出,CCW無脈沖輸出。結合CW/CCW的數量并配合啟閉機的相關參數如速比、輥筒直徑等可以計算啟閉機的實時開度。
3 啟閉機荷重開度檢測系統
3.1 檢測系統硬件
圖7為啟閉機荷重開度檢測系統的硬件結構。采用內核為ARM Cortex-M3的STM32F103作為微控制器,其內部資源豐富。荷重開度一體式傳感器輸出的0~5 V信號經濾波等處理后,由24位Σ-σ型AD7190實現AD轉換,CW/CCW開度計數脈沖信號經邏輯電平轉換后接入MCU的TIM1和TIM2定時計數器,通過設置全局開度脈沖計數變量實現對CW/CCW脈沖的加/減計數,同時為實現檢測系統對啟閉機開度信息的斷電保持,采用串行SRAM保存與開度相關的數據并用后備電池對SRAM芯片供電,并配置必要的顯示、鍵盤等人機接口及串行通信等功能。

圖8 采用灰色關聯校正及回歸處理的荷重檢測示意圖Fig.8 Diagram of hoist load detection combined grey correlation correction with regression

圖7 啟閉機荷重開度檢測系統電路框圖Fig.7 Hardware structure diagram of system for hoist load and opening detection
3.2 檢測系統軟件設計
啟閉機的實時開度計算可結合開度計數脈沖數與啟閉機的相關參數實現,檢測系統軟件設計的關鍵為如何從傳感器輸出的總力矩電信號中得到啟閉機的實際負載。
傳感器檢測到的總力矩既包括由于啟閉機實際負載引起的負載力矩,也包含其他因素產生的附加力矩,其中,負載力矩在實際負載不變時其值不變,而其他因素產生的附加力矩則具有波動性和隨機性,由于啟閉機的實際負載是通過對總力矩對應的AD轉換值進行回歸獲得的,如果直接通過對總力矩信號實施啟閉機實際負載的回歸,其精度必將受到較大影響,因此,在系統的荷重檢測過程中,首先應對總力矩對應的AD轉換值進行校正,然后再對其校正值進行負載回歸,在負載回歸模型的基礎上進一步對回歸預測值進行校正,得到最終的啟閉機實際負載。因此,為了從總力矩信號得到啟閉機的實際負載,采用基于灰色關聯的偏差校正環節對傳感器總力矩信號輸出的波動性和隨機性進行抑制及校正,系統的荷重檢測示意圖如圖8所示。
啟閉機荷重檢測分2個階段進行,圖8中,Q為第1階段期望輸出,ur為第1階段灰色關聯校正的校正量,uc為第1階段常規控制模式下的輸出量,Y為第1階段實際輸出。T為第2階段的期望輸出,Tr為第2階段灰色關聯校正的校正量,Yo為第2階段的實際輸出。
第1階段,給啟閉機施加固定負載,選擇起始時間段內AD轉換序列的集合平均作為期望輸出,并將其擴展為元素,為該集合平均常值期望數據數列Q,選取某時間段內的AD轉換數據序列作為比較數據數列,通過常規控制如低通濾波等得到的值uc與灰色關聯校正環節得到的值ur疊加作為第1階段的實際輸出Y,由于Y對Q具有跟蹤作用,得到的實際輸出Y波動性及隨機性會大大降低,可以有效抑制由于非實際負載引起的AD轉換值波動。第2階段,將第1階段的輸出Y作為輸入變量,通過回歸模型預測啟閉機的負載,并進一步采用灰色關聯校正環節對該預測負載進行校正,得到最終的啟閉機負載輸出Yo。
3.2.1 啟閉機荷重檢測的灰色關聯校正模型
灰色關聯分析是尋找一種能夠衡量系統各因素間的關聯度,通過事物或因素時間序列曲線間的幾何形狀相似水平來判別其緊密性[9-12]。由于固定負載引起的力矩理論上是不變的,將常值數據序列作為期望數據數列,采用灰色關聯校正可使得期望輸出和實際輸出間的誤差變小。以荷重檢測第1階段來說明灰色關聯校正模型的建立,第2階段模型建立方法類似。
給啟閉機施加一恒定的負載,由于其引起的力矩理論上不變,將校正前的第1個τ時間段內的n個數據序列經低通濾波及平均等處理后得到的數值作為期望輸出,并將其擴展為1×n的輸出期望數據序列{Q(τ-n+1),Q(τ-n+2),…,Q(n)},其中Q(i)為常數,總力矩對應的AD轉換值在τ時刻及其前n個數據組成實際輸出序列{Y(τ-n+1),Y(τ-n+2),…,Y(n)},將期望數據序列作為參考數據序列,實際輸出序列作為比較數據數列,計算兩數據數列間的灰色關聯度。實際輸出數列與參考數據數列越接近,表明兩者灰色關聯度越高,灰色關聯補償量ur就越小,否則,ur就越大。
(1)計算參考數據數列Q(i)與比較數列Y(i)之間的絕對差值,即
Δτ=|Y(τ)-Q(τ)|
(4)
(2)計算τ時間段內絕對差值的最大值為
(5)
(3)參考數據數列的累減數據序列Q′(τ)與比較數據數列的累減數據序列Y′(τ)分別為

(6)

(7)
(4)求累減數列Q′(τ) 及Y′(τ)之間的最大絕對差值為
Δ′τ=|Y′(τ)-Q′(τ)|
(8)
(5)結合上述步驟,確定灰色關聯校正模型為
(9)
其中
式中α——非負校正系數,其值決定校正的強弱
n——數據序列的維數
ε——灰色關聯分辨系數,一般取0.5
λ1、λ2——權重系數,通常情況下λ1>λ2,具體取值根據荷重檢測結果進行調整
當期望輸出大于實際輸出時,校正量為正值,兩者相等時補償量為0,否則,補償量為負值。
3.2.2 啟閉機實際負載的回歸
應當指出的是,由于圖8中Y的數值是經過灰色關聯校正對應于總力矩的AD轉換校正值,對于一般的啟閉機而言,通過力矩實現對實際負載的標定比較困難,為了獲取啟閉機的實際負載,需要進一步對第1階段的AD轉換校正值Y進行回歸。
最小二乘支持向量回歸(LS-SVR)是機器學習的一個重要方法,在離散時間序列的預測研究中,經典的支持向量回歸算法(SVR)已經得到很好的驗證[13-14],在標準的SVR基礎上,LS-SVR改進了SVR的算法,克服了經典SVR算法的訓練速度慢等問題[15-16]。偏最小二乘回歸(PLSR)是一種基于統計理論的回歸分析方法,目前已經廣泛地應用于多個領域并取得了很好的效果[17-22]。為了從總力矩信號中獲取啟閉機的實際負載,并驗證其回歸的效果,分別用LS-SVR及PLSR對第1階段的Y值進行啟閉機實際負載回歸。
3.2.2.1 啟閉機荷重的最小二乘支持向量回歸
(1)分別給啟閉機施加不同的負載,得到對應不同負載的第1階段AD轉換校正值Yi,對其在滿開度區間進行均值處理得到Y′i,對應的啟閉機實際負載為Ti,將Y′i及Ti作為訓練樣本集{(Y′i,Ti)} (i=1,2,…,N),Y′i為回歸模型的輸入量,Y′i∈RN。通過非線性映射φ(·)將N維樣本輸入映射到高維特征空間,用LS-SVR定義優化問題
(10)
式中ξi——非線性系統模型樣本的回歸誤差γ——正則化參數b——偏差變量ω——權矢量
引入拉格朗日乘子ai,將式(10)的條件約束優化轉換為無條件約束優化
(11)
分別對式(12)的變量ω、b、ξ及a求偏導并令其值為0,消去ω、ξ,得到線性方程組
(12)
其中
E=[1 1 … 1]TK=φ(Y′i)Tφ(Y′j)
T=[T1T2…TN]T
選取徑向基核函數
(13)
得到啟閉機實際負載的LS-SVR非線性預測模型
(14)其中,正則化參數γ和核參數σ2的選取用文獻[16]中的混沌粒子群(CPSO)方法。
(2)將LS-SVR模型得到的第1個時間域τ內的預測值作為期望輸出,再根據灰色關聯校正原理,進行第2階段的灰色關聯校正得到啟閉機的最終負載輸出值Yo。
3.2.2.2 啟閉機荷重的偏最小二乘回歸
一般來說,啟閉機的實際負載和第1階段輸出的AD轉換校正值Y并不呈線性關系,因此,在啟閉機負載與自變量為第1階段等效輸出之間的關系式中適當增加自變量的非齊次項,可提高啟閉機負載的回歸精度。將第2階段預測的啟閉機負載作為單因變量y,y=T,記第1階段的等效輸出值為n,n=Y′,以n1/2、n、n3/2、n2、n5/2作為自變量,并計x1=n1/2,x2=n,x3=n3/2,x4=n2,x5=n5/2。將啟閉機的滿開度區間等分為k等份,分別求出各等份區間內的等效輸出值,給啟閉機施加l個不同的固定負載,在滿開度范圍內獲得自變量和因變量的樣本數據X及Y,其中Xu×5為解釋矩陣,Yu×1為響應矩陣,u=kl。按照降序及交叉有效性原則,對樣本矩陣X進行標準化處理,并從標準化處理后的矩陣中依次選擇使方差Var(ti) 和協方差Cov(ti,y) 都盡可能大的成分t1,t2,…,th(h≤5),然后通過建立y與t1,t2,…,th的回歸方程最終得到y與x1,x2,…,xh的回歸方程式。
(1)將矩陣X與因變量Y進行標準化處理,得到標準化變量矩陣E0和列向量ξ0,即
(15)
其中
式中μjx、Sjx——第j個自變量xj的樣本均值和樣本標準差
μy、Sy——因變量yj的樣本均值和樣本標準差
(2)從E0中提取第1個成分
(16)
并執行E0和ξ0對第1個成分t1的回歸
(17)
其中
式中p1、r1——回歸系數E1、ξ1——回歸方程的殘差矩陣和向量
(3)繼續提取第2個成分t2,并執行E1和ξ1對第2個成分t2的回歸
(18)
(19)
其中
式中p2、r2——回歸系數E2、ξ2——回歸方程的殘差矩陣和向量
(4)繼續提取成分,設得到m個成分t1,t2,…,tm,并執行ξ0對m個成分的回歸,即ξ0=r1t1+r2t2+r3t3+…+rmtm,最終將之還原成原始變量的形式,得到啟閉機負載回歸模型
y=α0+α1x1+α2x2+…+α5x5
(20)
式中α0——回歸截距α1、α2、…、α5——對應原始自變量和原始因變量間的回歸系數
在PLSR建模過程中,成分數目選取采用交叉有效性原則,具體方法見文獻[22]。
(5)將PLSR模型得到的第1個時間域τ內的預測值作為期望輸出,在第2階段進一步進行灰色關聯校正得到啟閉機的最終負載輸出值Yo。
4 結果分析
試驗平臺如圖9所示,采用NQPL-80KN-4.0M型螺桿式啟閉機,其負載滿量程約為8 000 kg,螺桿螺距為16 mm,渦輪齒數為50,蝸桿齒數為1,電動機轉速為940 r/min,開度滿量程為4 m。啟閉機在升降過程中,電動機每旋轉一周傳感器輸出60個有效開度計數脈沖,每個脈沖對應的開度變化值約為0.005 mm,即開度檢測分辨率可達0.005 mm,結合圖6中電動機旋轉方向不同時輸出信號的波形,通過獲取開度計數脈沖CW/CCW的數量可以計算啟閉機實時開度。

圖9 啟閉機荷重檢測試驗臺Fig.9 Experiment equipment for hoist load detection
啟閉機荷重檢測的分析以啟閉機上升過程來說明,下降時其處理方法相同。試驗前對荷重開度一體式傳感器的輸出進行預調,給啟閉機施加最大額定負載約為8 000 kg,提升啟閉機,將傳感器的輸出預調至4 V左右,保證AD轉換有一定的余量。AD轉換速度設定為60次/s,選取15位有效位,雙極性工作方式,0~5 V的總力矩經變換得到的轉換范圍為-16 383~16 383。

圖11 荷重檢測第1階段輸出波動值示意圖Fig.11 Wave value of output for the first stage of hoist load detection
依次給啟閉機施加不同負載,選擇0 kg、1 000 kg、2 000 kg、…、8 000 kg共9種負載,在整個上升期間,記錄第1階段未經灰色關聯校正的不同負載對應的AD轉換值及經灰色關聯校正的AD轉換校正值,并對AD轉換校正值進行啟閉機負載的LS-SVR及PLSR回歸。
圖10為啟閉機實際負載為4 000 kg時第1階段AD轉換值及其校正輸出值示意圖,灰色關聯校正系數α取0.5,權重系數λ1和λ2分別取0.95和0.05,維數n為10,上升初始階段前20個采樣值經軟件低通濾波及平均處理后的集合平均值作為期望數據數列。

圖10 啟閉機負載為4 000 kg時AD轉換值及其校正輸出值Fig.10 AD conversion value and its correction when being loaded 4 000 kg for hoist
圖11為第1階段原始的AD輸出值及經過灰色關聯校正的AD轉換校正值的波動示意圖。
結合圖10和圖11,在荷重檢測的第1階段,未進行灰色關聯校正的AD轉換值波動性及隨機性較大,在全荷重及全開度區間,其波動的峰峰值超過500,而經過灰色關聯校正的AD轉換值波動變小且趨于固定值約6 540,波動的峰峰值不超過60。根據灰色關聯校正原理可知,參考數據數列元素為常值,經過校正的實際輸出應能跟蹤參考數據數列的變化趨勢,即實際輸出值以參考數據數列為中心的波動變小。由于啟閉機的實際固定負載引起的力矩理論上不變,經過校正后的實際輸出值偏離參考數據數列的波動越小,通過總力矩回歸實際載荷的回歸精度就越高。
對校正后的AD轉換值分別采用LS-SVR及PLSR進行啟閉機實際負載回歸,并在第2階段進一步采用灰色關聯校正對回歸模型預測值進行校正。給啟閉機分別施加4 500 kg和7 500 kg的實際載荷,得到0~4 000 mm范圍內的測量數據,第2階段的灰色關聯校正系數和權重等參數和第1階段取值相同,記錄每500 mm開度區間內檢測系統的荷重檢測輸出最大偏差值,得到數據見表1。
圖12為啟閉機實際負載分別為4 500 kg及7 500 kg時采用灰色關聯校正的啟閉機荷重回歸偏差曲線,圖13為采用灰色關聯校正的啟閉機全量程荷重檢測偏差分布圖,其中圖12及圖13為選取成分數為5及4個開度等份區間得到的PLSR結合灰色關聯校正的啟閉機負載回歸偏差。

表1 采用灰色關聯校正的啟閉機荷重檢測偏差Tab.1 Deviations of hoist load detection with grey correlation correction kg
由圖12和圖13可知,在荷重檢測的第2階段,以啟閉機荷重滿量程為8 000 kg計算,結合灰色關聯校正,當采用LS-SVR進行啟閉機負載回歸時,其滿量程稱量誤差小于±0.6%,當采用PLSR回歸時,其滿量程稱量誤差小于±1%,2種回歸方法都得到了較好的精度。當采用PLSR回歸時,可通過適當增加等份區間數提高其回歸精度,但計算量也相應增加。
在荷重檢測的第2階段,仍需采用灰色關聯校正環節對啟閉機的負載預測輸出進行校正,否則其輸出的波動值及隨機性仍較大,造成在全開度區間內啟閉機荷重檢測的誤差變大。如圖14所示,在第2階段,當未采用灰色關聯校正環節時,全量程范圍內,LS-SVR啟閉機負載回歸誤差約±2.5%,PLSR啟閉機回歸誤差約±3%。

圖12 結合灰色關聯校正的稱量誤差曲線Fig.12 Error curves of hoist load regression combined grey correlation correction with regression

圖13 采用灰色關聯校正的啟閉機全量程荷重檢測偏差Fig.13 Error distributions for whole range hoist load detection with grey correlation correction

圖14 未采用灰色關聯校正的啟閉機全量程荷重檢測偏差Fig.14 Error distributions for whole range hoist load detection without grey correlation correction
啟閉機荷重檢測的精度一直是啟閉機應用過程中較難解決的問題,通過以上所述,由于荷重一體式傳感器的總力矩輸出信號中既包括啟閉機實際負載引起的力矩,也包括了其他因素引起的附加力矩,而附加力矩在啟閉機的全開度區間波動性及隨機性較大,通過灰色關聯校正環節可以有效抑制總力矩中的波動及隨機變化部分,并將灰色關聯校正與回歸分析相結合,可以有效提高啟閉機荷重檢測的精度。
采用荷重開度一體式傳感器對啟閉機進行荷重開度信息獲取,同時也充當了聯軸器的作用,改善了現有檢測裝置維護安裝困難的狀況。由于一體式傳感器與電動機的動力輸出軸直接連接,在啟閉機升降過程中,開度計數脈沖數大大增加,有效地提高了開度分辨率。
5 結論
(1)針對電動機驅動的啟閉機應用場合,采用荷重開度一體式傳感器實現對開度及荷重信號的獲取,該傳感器同時可起到聯軸器的作用,方便于安裝及維護,并改變了現有螺桿式啟閉機荷重檢測難以實現的狀況。
(2)通過旋轉變壓器耦合和光電耦合方式,實現了荷重開度一體式傳感器內部旋轉電路的供電、總力矩及開度計數脈沖等電信號的非接觸傳輸。
(3)采用分2個階段基于灰色關聯校正及負載回歸分析的啟閉機荷重檢測方法,利用灰色關聯校正環節降低和抑制總力矩信號中的波動及隨機變化成分,在此基礎上,結合LS-SVR及PLSR實現了啟閉機實際負載的回歸。
(4)通過2個階段的灰色關聯校正及回歸處理,在滿量程范圍內,LS-SVR負載回歸誤差在±0.6%范圍內,PLSR回歸誤差在±1%范圍內。
(5)由于荷重開度一體式傳感器與電動機的動力輸出軸直接連接,在啟閉機升降過程中,開度計數脈沖CW/CCS的數量大大增加,有效地提高了開度檢測分辨率。
1 倪世江,倪帥,唐麗娜. 數字化螺桿式啟閉機的研究與應用[J].中國農村水利水電,2012(2): 100-102. NI Shijiang, NI Shuai, TANG Li’na. The engineering research and application of the digital screw refrigerating machine[J].China Rural Water and Hydropower,2012(2):100-102.(in Chinese)
2 王建腸,徐小群. 閘門啟閉機智能型載荷監控儀的設計與應用[J].自動化儀表, 2001, 22(3): 24-35. WANG Jianchang, XU Xiaoqun. The design and application of the intelligent load monitor for the start/stop machine of sluice gate[J]. Process Automation Instrumentation, 2001, 22(3): 24-35. (in Chinese)
3 吳韻俠,胡修池,高衛紅. 引黃涵閘螺桿式啟閉機的維護技術研究與應用[J].水利水電技術,2011, 42(2): 74-85. WU Yunxia,HU Xiuchi,GAO Weihong. Study and application of maintenance technology for screw gate hoist of Yellow River diversion sluice gate[J].Water Resources and Hydropower Engineering, 2011, 42(2):74-85.(in Chinese)
4 童光明,吳超凡. 雙吊點螺桿啟閉機在農田水利工程中的應用[J].湖南農業大學學報, 2000, 26(3): 228-229. TONG Guangming, WU Chaofan. Application of double-hook screw-crane in fields and water resources engineering[J]. Journal of Hunan Agricultural University, 2000, 26(3): 228-229. (in Chinese)
5 查六一,邵建龍,周玉巖,等.基于S7-200PLC的閘門卷揚啟閉機的控制系統設計[J].水電能源科學,2010,28(3):127-130. ZHA Liuyi, SHAO Jianlong, ZHOU Yuyan, et al. Design of intelligent control system of cable gate hoist of sluice based on S7-200PLC[J]. Water Resource and Power,2010,28(3):127-130.(in Chinese)
6 丁問司,張旭,范亞軍.細長型液壓啟閉機液壓缸筒活塞桿撓度的計算分析[J].華南理工大學學報:自然科學版,2014,42(1):17-21. DING Wensi, ZHANG Xu, FAN Yajun. Calculation and analysis of deflection on piston rod of slim hydraulic hoist cylinder[J]. Journal of South China University of Technology: Natural Science Edition, 2014, 42(1):17-21.(in Chinese)
7 劉鴻文. 材料力學[M]. 5版.北京:高等教育出版社,2011.
8 崔驥,李懷瓊,陳錢. 光柵莫爾條紋的細分與辯向新技術[J].光學技術, 2000, 26(4): 294-296. CUI Ji, LI Huaiqiong, CHEN Qian. New digital subdividing and rester-sensing technique for moire fringes of grating[J]. Optical Technique, 2000, 26(4): 294-296. (in Chinese)
9 劉春景,唐敦兵,何華,等. 基于灰色關聯和主成分分析的車削加工多目標優化[J/OL].農業機械學報, 2013, 44(4): 293-298. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130450&flag=1. DOI:10.6041/j.issn.1000-1298.2013.04.050. LIU Chunjing, TANG Dunbing, HE Hua, et al. Multi-objective optimization of turning based on grey relational and principal component analysis[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 293-298. (in Chinese)
10 WANG Z X. Correlation analysis of sequences with interval grey numbers based on the kernel and greyness degree[J]. Kybernetes, 2013, 42(2):309-317.
11 ZHANG X R, ZHANG Q L. Study on one new grey similarity correlation degree model and its applications[J]. Journal of Chemical and Pharmaceutical Research, 2014,6(6): 1406-1411.
12 朱堅民,雷靜桃,黃之文,等.基于灰色關聯補償控制的氣動位置伺服控制系統[J].機械工程學報,2012, 48(20):159-166. ZHU Jianmin, LEI Jingtao, HUANG Zhiwen, et al. Pneumatic position servo control system based on grey relational compensation control[J]. Journal of Mechanical Engineering, 2012,48(20):159-166. (in Chinese)
13 SUYKENS JAK, VANDEWALLE J. Least squares support vector machine classifiers[J].Neural Processing Letters, 1999, 9(3): 293-300.
14 張聞宇,丁幼春,王雪玲,等.基于SVR逆向模型的拖拉機導航純追蹤控制方法[J/OL].農業機械學報, 2016,47(1):29-36.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160105&flag=1.DOI:10.6041/j.issn.1000-1298.2016.01.005. ZHANG Wenyu, DING Youchun, WANG Xueling, et al. Pure pursuit control method based on SVR inverse-model for tractor navigation[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1):29-36. (in Chinese)
15 趙進輝,袁海超,劉木華,等.鴨肉中金霉素殘留量LSSVR-同步熒光法測定[J/OL].農業機械學報, 2012,43(12):136-140. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121225&flag=1.DOI:10.6041/j.issn.1000-1298.2012.12.025. ZHAO Jinhui, YUAN Haichao, LIU Muhua, et al. Determination of aureomycin content in duck meat using LSSVR and synchronous fluorescence spectroscopy[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(12):136-140. (in Chinese)
16 黃麗,孫玉坤,嵇小輔,等.基于CPSO與LS-SVM融合的發酵過程軟測量建模[J].儀器儀表學報, 2011,32(9):2066-2070. HUANG Li, SUN Yukun, JI Xiaofu, et al. Soft sensor modeling of fermentation process based on the combination of CPSO and LSSVM[J]. Chinese Journal of Scientific Instrument,2011,32(9):2066-2070. (in Chinese)
17 SCHWARTZ W R, KEMBHAVIA, HARWOOD D, et al. Human detection using partial least squares analysis[C]∥IEEE 12th International Conference on Computer Vision,2009:24-31.
18 BARKER M, RAYENS W. Partial least squares for discrimination[J].Journal of Chemometrics,2003,17(3):166-173.
19 CARRASCAL L, GALVAN I, GORDO O. Partial least squares regression as an alternative to current regression methods use in ecology[J]. Oikos,2009,118(5):681-690.
20 何力,曲仕茹. 基于PLS-VIP特征降維的車輛檢測[J].中國公路學報,2014,27(4): 98-105. HE Li, QU Shiru. Dimensionality reduction based on PLS-VIP for vehicle detection[J].China Journal of Highway and Transport, 2014,27(4): 98-105. (in Chinese)
21 何東建,陳煦.土壤有機質含量田間實時測定方法[J/OL].農業機械學報,2015,46(1):127-132. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150119&flag=1.DOI:10.6041/j.issn.1000-1298.2015.01.019. HE Dongjian, CHEN Xu. Real-time measurement of soil organic matter content in field[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(1): 127-132. (in Chinese)
22 常英杰,陸憲忠,王世龍,等.基于偏最小二乘法的發動機排氣分析儀線性化研究[J].機械工程學報,2011,47(10):76-81. CHANG Yingjie, LU Xianzhong, WANG Shilong, et al. Study on the linearization of analyzer for engine exhaust based on partial least squares[J]. Journal of Mechanical Engineering, 2011,47(10):76-81. (in Chinese)
Load and Opening Detection System for Hoist Driven by Motor
QIAO Aimin1HE Boxia2LUO Shaoxuan1HUANG Yinghui1WANG Yanchun1
(1.SchoolofElectronicandElectricalEngineering,BengbuUniversity,Bengbu233000,China2.SchoolofMechanicalEngineering,NanjingUniversityofScienceandTechnology,Nanjing210094,China)
Installed between the motor’s shaft and the hoist power input one, an integrate sensor could output not only the total torque signal related to the change for hoist’s load but also 60 pulses per revolution for motor’s shaft. The hoist’s opening could be calculated by associating the number of those pulses with some parameters of the hoist. In the integrate sensor, those rotary circuits could be powered from the rotary secondary of transformer whose primary was fixed with the sensor’s metal shell, which was used as a part of magnetic core of the transformer. By using the photoelectric coupling method, non-contact transmission for the sensor’s signals about the total torque and the opening was realized. Besides the torque caused by constant load, the total one also included some other torques shown as fluctuation and unsteadiness because of those factors, such as friction existing in the hoist’s mechanical structure. In order to get the actual load from the total torque signal, two phases were selected for hoist’s load detection. Firstly, the analog-to-digital converter (ADC) output value corresponding to the total torque was corrected though gray correlation analysis, and the corrected ADC value whose fluctuation and unsteadiness had been greatly reduced was selected to be as the result of the first phase. In the second phase, by using the result of the first phase as input variable, the hoist’s load predicted model was founded according to the least square support vector regression (LS-SVR) or partial least square regression (PLSR). Taking the first predicted value as the expected data sequence and implementing the correction based on the gray correlation analysis again, the hoist actual load was finally attained. Experiment result showed that the error of the result of load detection was less than ±0.6% for LS-SVR and below±1% for PLSR model cooperated with the correction based on the gray correlation analysis. Meanwhile, since the integrate sensor was directly installed between the motor shaft and the hoist one, the number of pulses would be greatly increased during the hoist’s moving up and down which could well improve the opening detection resolution. The resolution of the hoist opening detection was far below 1 mm.
hoist; load and opening; detection system; motor drive
10.6041/j.issn.1000-1298.2017.01.051
2016-11-08
2016-11-29
國家自然科學基金項目(51175267、51575281)和安徽省高等學校省級自然科學重點基金項目(KJ20160A452、KJ2013Z193)
喬愛民(1970—),男,副教授,主要從事嵌入式系統、機電系統設計、無線傳感器網絡研究,E-mail: aimin_qiao@163.com
TH823; TP212
A
1000-1298(2017)01-0386-11
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2021年17期)2021-11-06 03:21:36
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2019年15期)2019-09-02 01:52:00
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
