基于雙天線測向的航向對準數據處理方法研究
2017-02-05 11:30:42白玉棟李景巖
全球定位系統 2017年6期
關鍵詞:測量
白玉棟,李景巖
(91404部隊,河北 秦皇島 066000)
0 引 言
艦船航向精度關系到武器系統和探測系統作戰效能的發揮,在艦船作戰系統試驗中,航向精度檢驗是其他裝備試驗的基礎[1-2]。艦船的姿態測量系統通常采用慣性測量設備,由于慣性元件的零偏、漂移問題,長時間工作系統精度變差,為了滿足長時間保持精度的試驗需求,需要對慣導測姿系統艏向角零偏、漂移進行動態監測,本文將研究基于衛星載波相位差分航向測量,以實現艦船航向實時動態監測。雙天線航向測量設備是在載體平臺上適當配置兩個天線,利用雙頻載波相位差分測量技術,求解基線矢量,通過坐標轉換求得載體航向角、俯仰角,從而得到載體的航向信息[3-5]。受到艦船甲板建筑的限制和安裝誤差的影響,實際應用中兩個天線在艦船上架設位置的連線與艦船艏艉線不平行,造成航向測量與艦船實際航向存在誤差。本文結合艦船艏向角零位檢查試驗,分析艦船姿態及天線架設位置對航向測量誤差影響,研究適合艦船試驗的數據處理方法。
1 相關坐標系及坐標轉換[6-7]
1.1 艦船地理坐標系
艦船地理坐標系O-XTYTZT的原點O位于艦船搖擺中心,XT軸平行于當地水平面指向正東,YT軸平行當地水平面指向正北,ZT軸垂直于當地水平面向上,XT、YT和ZT組成右手坐標系。艦船地理坐標系是以艦船搖擺中心為原點的直角坐標系,坐標系中點的坐標用(xT,yT,zT)表示。
1.2 艦船甲板坐標系
艦船甲板坐標系O-XBYBZB的原點O位于艦船搖擺中心,YB軸平行于艦船艏艉線指向艦艏,XB軸垂直YB軸且平行于甲板指向艦船右舷,ZB軸垂直甲板向上,XB、YB和ZB組成右手坐標系。艦船甲板坐標系是以艦船搖擺中心為原點的直角坐標系,坐標系中點的坐標用(xB,yB,zB)表示。
1.3 坐標系轉換
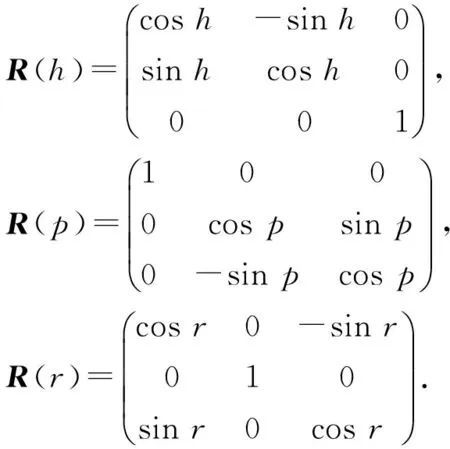
艦船地理坐標系O-XTYTZT和艦船甲板坐標系O-XBYBZB的原點都位于艦船搖擺中心,從艦船地理坐標系轉換到艦船甲板坐標系只需要進行角度的旋轉,按先航向、再縱搖最后橫搖的變換順序進行。即艦船地理坐標系經由航向變換矩陣R(h),縱搖變換矩陣R(p),最后由橫搖變換矩陣R(r)轉換到艦船甲板坐標系。
其中,
聯系人: 白玉棟E-mail: baiyudong2003@126.com

(1)


(2)
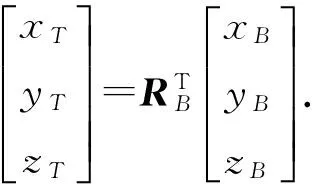
甲板坐標系到地理坐標系表示為
(3)
2 測量誤差分析
(4)

(5)

Q=A′-h

(6)
由式(6)可知,雙天線航向測量系統航向測量誤差與航向無關,與艦船縱橫搖、天線架設位置相關。為研究艦艇姿態和天線架設位置對測量誤差的影響,對單獨存在水平架設偏差、垂直架設偏差時受縱搖、橫搖影響及單獨存在橫搖、縱搖受水平架設偏差、垂直架設偏差情況進行仿真分析,結果如圖1~圖4所示。
A=5°,H=0°,橫搖范圍為-20°~20°,縱搖范圍為-30°~30°,誤差分布如圖1所示;A=0°,H=5°,橫搖范圍為-20°~20°,縱搖范圍為-30°~30°,誤差分布如圖2所示。分析可知:水平架設偏差帶來的測量誤差受艦船縱搖影響較橫搖影響大;垂直架設偏差帶來的測量誤差受橫搖影響較縱搖影響大。
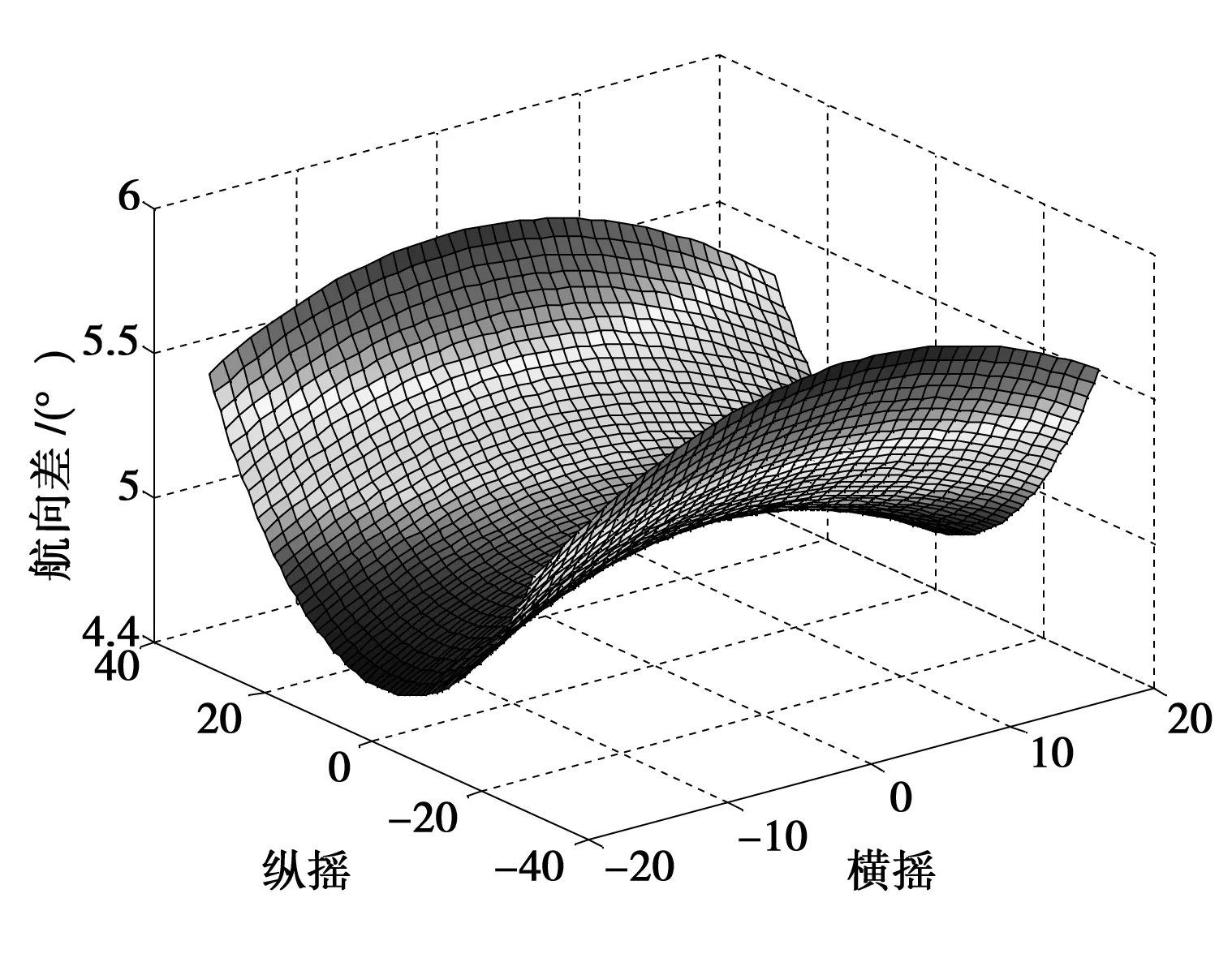
圖1 A=5°,H=0°航向誤差與縱橫搖關系
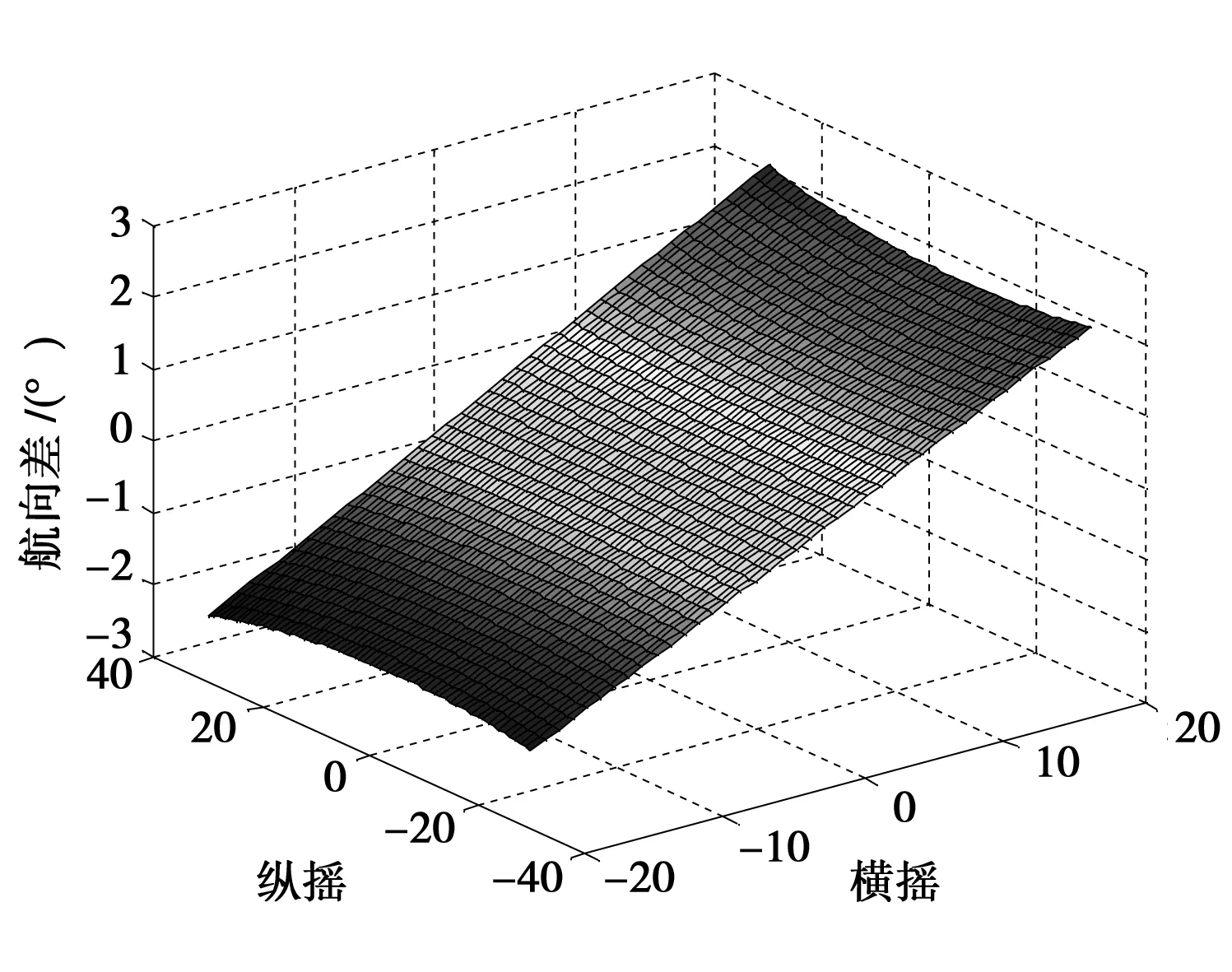
圖2 A=0°,H=5°航向誤差與縱橫搖關系
r=5°,p=0°,架設位置A為-20°~20°,H為-30°~30°,誤差分布如圖3所示;r=0°,p=5°,架設位置A為-20°~20°,H為-30°~30°,誤差分布如圖4所示。分析可知:艦船橫搖帶來測量誤差受水平架設偏差影響較垂直架設偏差影響大;艦船縱搖帶來測量誤差受水平架設偏差影響較垂直架設偏差影響大。
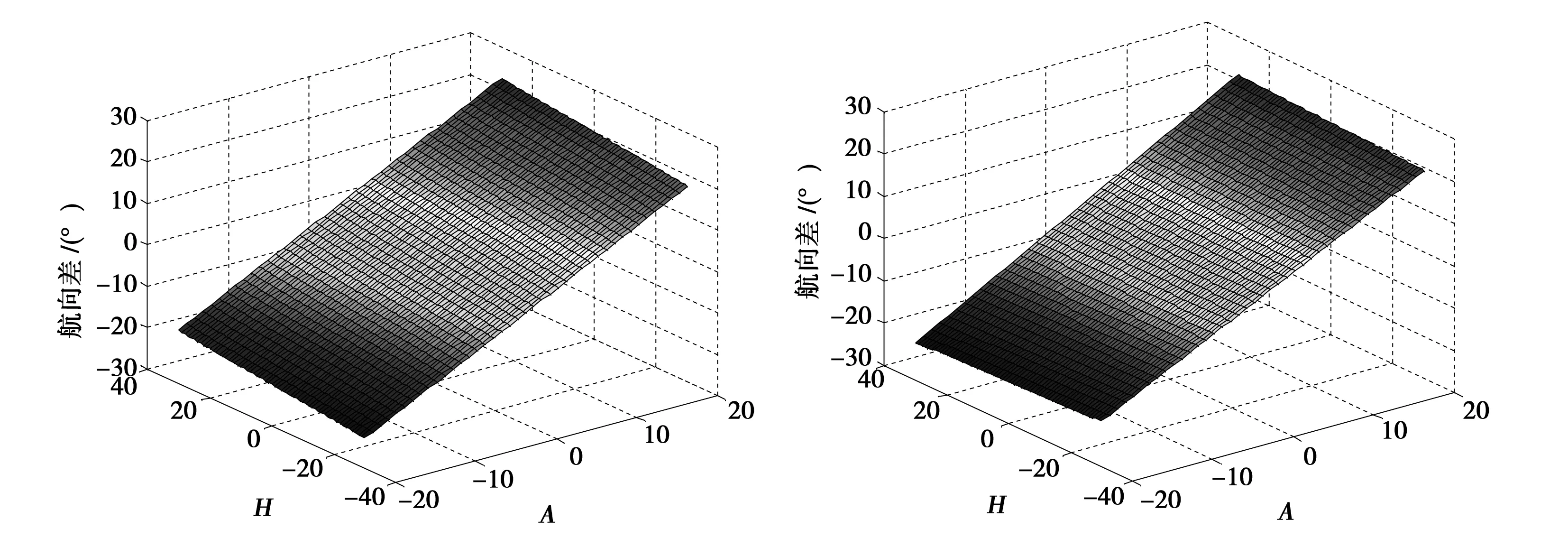
圖3 r=5°,p=0°航向誤差與天線位置關系 圖4 r=0°,p=5°航向誤差與天線位置關系
3 試驗數據處理
對某型艦船導航艏向角零位檢查試驗中,雙天線航向測量系統作為真值測量設備,數據率10 Hz,輸出航向測量值A′,艏艉天線架設在艏艉線標志位上,艏艉線標志位甲板水平距離107 m,高差-4.28 m; 慣導輸出艦船姿態信息r,p,h″,數據率40 Hz,按照時間對齊,由式(7)計算出同一時刻慣導航向h″與約定真值h之差Δh,作為慣導航向對準試驗的統計量,實現在動態條件下慣導艏向角零位對準。其中,A′、r,p,h"為測量值,Q為根據公式(6)計算出的航向測量誤差。
Δh=h"-h=h"-(A′-Q) .
(7)
圖5為部分時間段試驗測量數據及處理數據曲線,表1為試驗期間數據處理結果。
圖5(a)為試驗期間慣導航向測量值h″和雙天線測量系統航向測量值A′;圖5(b)顯示動態條件下橫搖動態范圍大于縱搖動態范圍,本次試驗測量天線架設只有垂直架設偏差,橫搖對測量誤差起到主要作用; 圖5(c)示出了航向修正值范圍在-0.009~0.004之間,而雙天線航向測量精度為0.002°,由天線架設偏差和縱橫搖帶來的航向測量誤差超出雙天線設備本身的測量誤差,必須要進行航向修正,才能提高真值的準確度。表1結果顯示,利用測量誤差模型修正后的數據進行統計,慣導航向對準數據隨機差要比未修正前隨機差小,在一定程度上提高對準精度。
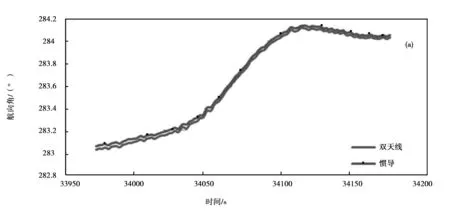
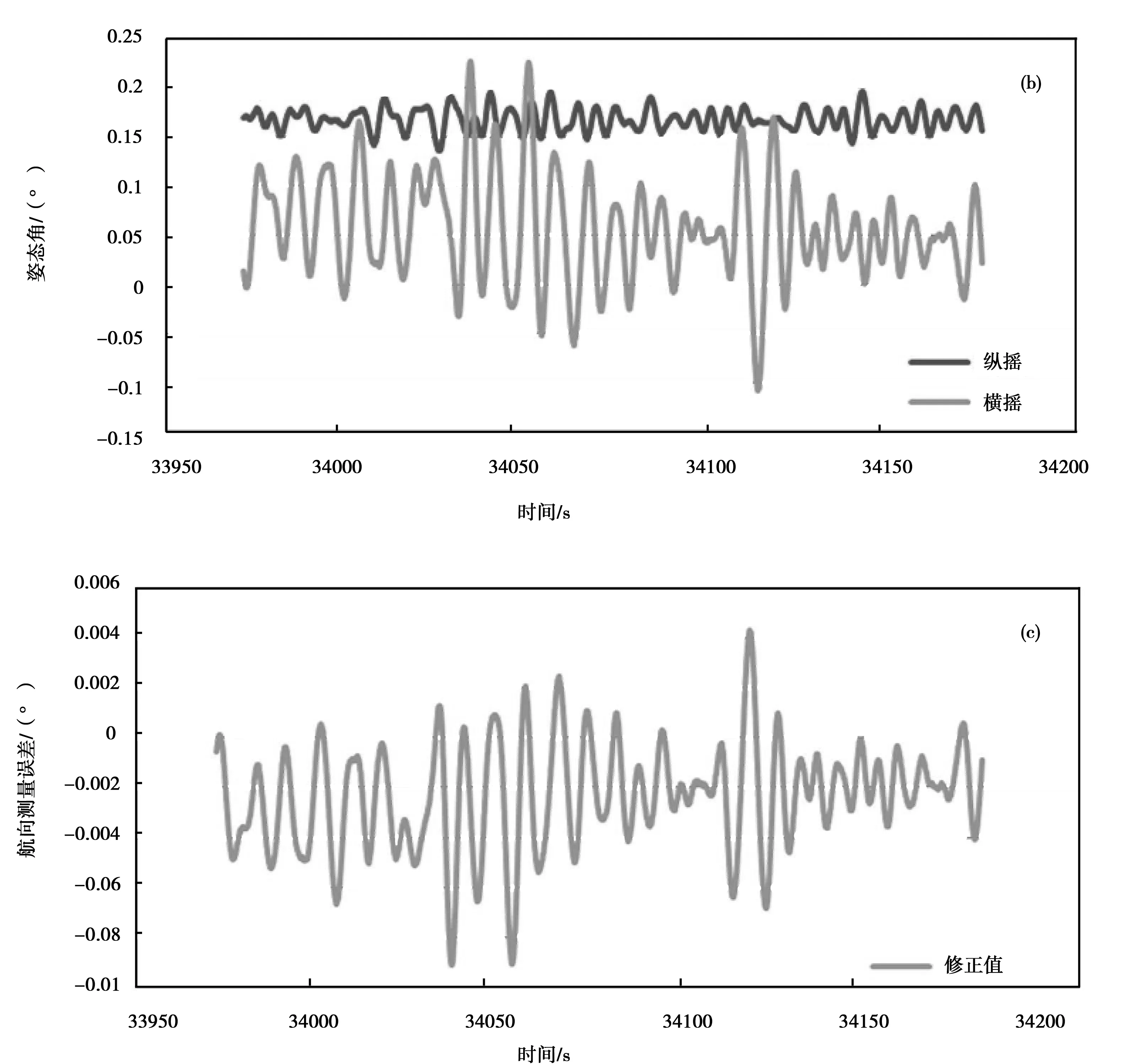
圖5 測量值及處理結果 (a)慣導與雙天線設備航向測量數據; (b)慣導縱橫搖測量數據; (c)雙天線設備測量誤差

樣本量慣導航向測量值與雙天線測量值比較慣導航向測量值與約定真值比較系統差隨機差系統差隨機差345770.019787°0.005199°0.020233°0.004357°
4 結束語
本文通過分析雙天線安裝偏差導致的動態條件下航向測量誤差,利用慣導設備輸出的縱橫搖信息,依據推導的測量誤差公式對測量結果進行修正,得出慣導航向測量值與航向約定真值的差值作為統計量,在艦船艏向角零位對準試驗中能夠提高檢測精度,滿足試驗要求。同時,艦船形變及慣導輸出的縱橫搖精度對測量影響未作考慮,在后續研究中需進一步完善。
[1] 劉星,付永杰,閆道廣,等.軍事裝備試驗計量技術與管理[M].北京:國防工業出版社,2005.
[2] 鄭梓禎,蔡迎波,王海波,等.艦船導航系統試驗與鑒定[M].北京:國防工業出版社,2005.
[3] 鴻巍,信冠杰,王紅波,等. 單基線GPS動態航向測量與誤差分析[J].中國慣性技術學報,2009,17(6):706-709.
[4] 李維林,李蕾,唐偉方. 基于GPS測量系統的艦載作戰系統動態航向對準技術研究[J].中國艦船研究,2009,4(4):68-71.
[5] 彭曉剛,呂志平,張高巍. 修正GPS測量艦船航向誤差的環境建模法[J].海洋測繪,2007,27(4):41-43.
[6] 周志恒,趙建軍,桑德一,等.艦艇姿態對作戰系統動態對準精度的影響分析[J].兵工自動化,2016,35(5):51-55.
[7] 王佳,王海波,陳榮娟,等.艦艇真航向動態測量方法中舷角德誤差修正及仿真[J].艦船科學技術,2013,35(9):66-70.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
