基于文獻(xiàn)計量學(xué)的無人駕駛汽車技術(shù)研究
2017-01-24 09:41:18李莎莎
山東工業(yè)技術(shù) 2017年1期
關(guān)鍵詞:數(shù)據(jù)分析
摘 要:本文基于文獻(xiàn)計量學(xué),對無人駕駛汽車技術(shù)研究的趨勢進(jìn)行了分析,通過研究發(fā)現(xiàn):我國的無人駕駛汽車的研究還處于起步階段,國際范圍內(nèi),無人駕駛汽車的研究主要集中在車輛位置和姿勢控制、數(shù)據(jù)采集轉(zhuǎn)換裝置、計算機(jī)邏輯算法、道路交通控制系統(tǒng)、即時車輛路徑控制等5個研究熱點。
關(guān)鍵詞:文獻(xiàn)計量學(xué);無人駕駛汽車;數(shù)據(jù)分析
DOI:10.16640/j.cnki.37-1222/t.2017.01.248
0 引言
無人駕駛汽車屬于智能汽車的一種,主要是依靠車內(nèi)以計算機(jī)系統(tǒng)為主的智能駕駛儀來實現(xiàn)無人駕駛,可以實現(xiàn)更加可靠和安全的行駛[1]。由于無人駕駛汽車這些優(yōu)點,它將是未來汽車發(fā)展的一個方向。雖然我國對無人駕駛汽車也有所研究,但是沒有國外先進(jìn)和成熟,我國對于智能汽車的研究大多局限于引進(jìn)理論介紹,沒有具體的方向指導(dǎo)。文獻(xiàn)專利計量學(xué)是一種先進(jìn)的數(shù)據(jù)發(fā)掘工具,通過研究無人駕駛汽車(智能汽車)歷年文獻(xiàn),能夠掌握核心技術(shù)和未來發(fā)展方向。
1 文獻(xiàn)計量學(xué)方法
文獻(xiàn)計量學(xué)通常依托于數(shù)據(jù)挖掘技術(shù)與數(shù)理統(tǒng)計分析方法,能夠有效獲取并分析個人無法處理的海量客觀數(shù)據(jù)信息。它是采用數(shù)學(xué)及統(tǒng)計學(xué)等計量方法研究文獻(xiàn)的體系及計量特征,從而獲得文獻(xiàn)的分布、數(shù)量、變化規(guī)律和定量管理等情報信息[2]。這個方法最早由美國目錄學(xué)家Alan Pritchard提出,他將數(shù)學(xué)及統(tǒng)計方法運用到圖書館與其他交流介質(zhì)的研究中[3]。不少學(xué)者通過該種方法取得了科研成果,如Alan Porter提出了“技術(shù)機(jī)會分析”方法[4];Liu 通過詞頻與引證分析對兩國的創(chuàng)新工作進(jìn)行了比較研究;Fu 對 1993-2008 年間污水處理研究時,運用詞頻分析的方法對該領(lǐng)域的技術(shù)研發(fā)方向進(jìn)行了統(tǒng)計歸納。通過其他大量的學(xué)者研究,文獻(xiàn)計量學(xué)方法日趨成熟,被運用到各種領(lǐng)域中。
在此基礎(chǔ)上,很多學(xué)者將文獻(xiàn)計量學(xué)方法引入技術(shù)分析與預(yù)測中,從而實現(xiàn)定性分析與定量分析的整合。
2 無人駕駛汽車技術(shù)計量學(xué)分析
2.1 關(guān)鍵詞萃取
由于無人駕駛汽車產(chǎn)業(yè)相關(guān)的技術(shù)缺乏直接的國際專利代碼(IPC),因此本文采用檢索詞檢索。檢索方式通常是檢索出的文獻(xiàn)在標(biāo)題、關(guān)鍵詞或摘要中含有檢索詞。在具體檢索時,對無人駕駛汽車,本文在摘要中檢索相關(guān)檢索詞。本研究的文獻(xiàn)來源是SCI/SSCI 期刊文獻(xiàn)數(shù)據(jù)庫。
利用文獻(xiàn)管理軟件NE對海量信息進(jìn)行有效歸總和統(tǒng)計分析,NE是一種進(jìn)行文獻(xiàn)計量學(xué)研究的方便的、行之有效的新工具[5]。通過選擇SCI/SSCI 期刊文獻(xiàn)數(shù)據(jù)庫進(jìn)行檢索,得到從2006年到2016年8月23日的2302篇期刊文獻(xiàn)數(shù)據(jù)。
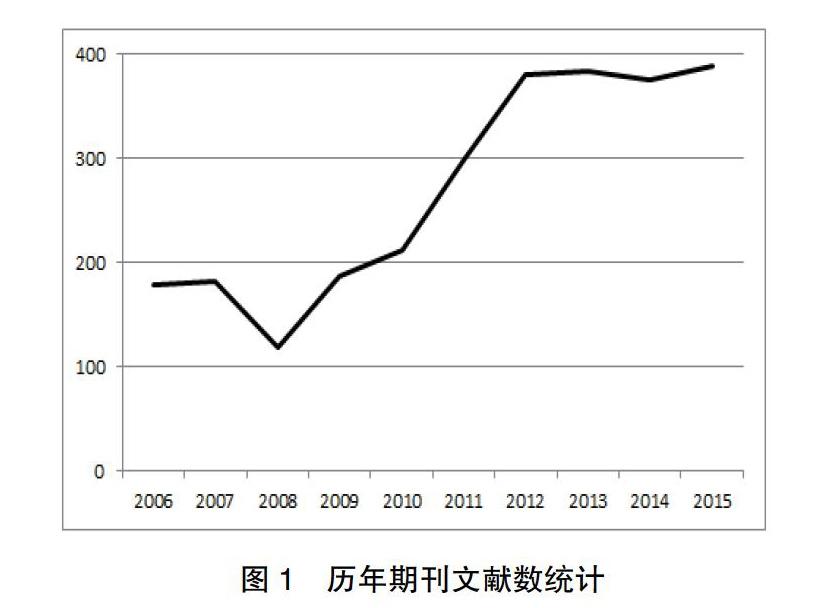
圖1是歷年來無人駕駛汽車文獻(xiàn)數(shù)的統(tǒng)計信息(由于2016年未完,故2016年文獻(xiàn)數(shù)未列入),可以看出對于無人駕駛汽車的研究有慢慢增長的趨勢,雖然在少數(shù)年份數(shù)目有所減少,可以發(fā)現(xiàn)在2008年,專利數(shù)和期刊文獻(xiàn)數(shù)都突然減少。這也說明了無人駕駛汽車(智能汽車)的研究跟經(jīng)濟(jì)環(huán)境相關(guān)關(guān)系是非常顯著的。但是總體趨勢是漸增的,這說明對無人駕駛汽車的研究將會使熱點話題。
2.2 數(shù)據(jù)分析
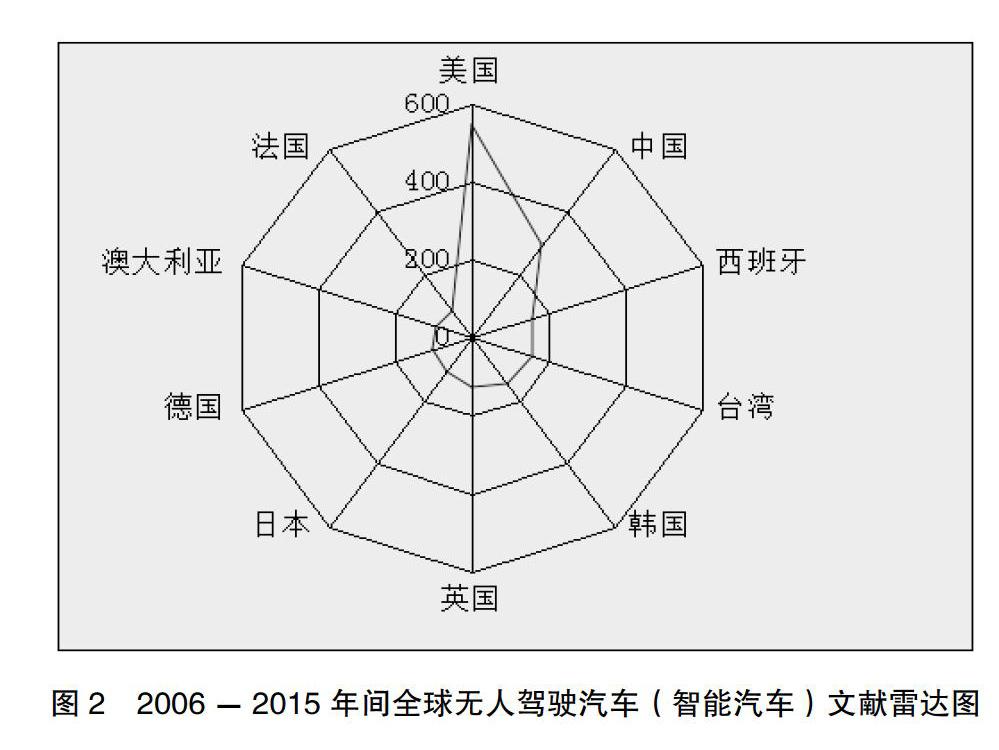
SCI期刊文獻(xiàn)數(shù)據(jù)庫作為全球化文獻(xiàn)檢索重要的數(shù)據(jù)源,用其中的文獻(xiàn)進(jìn)行科學(xué)統(tǒng)計研究與評估分析是非常具有科學(xué)性的。通過圖2的雷達(dá)圖,可以看出美國的在智能駕駛研究方面最為凸顯。還可以發(fā)現(xiàn),我國對于無人駕駛汽車的研究占據(jù)著一定的地位,十年內(nèi)發(fā)表文獻(xiàn)296篇,占總數(shù)的16.28%,緊追美國之后。這也說明我國在無人駕駛汽車研究方面走得比較靠前,這是我們的一大優(yōu)勢,也是我們實現(xiàn)汽車行業(yè)彎道超車的一大機(jī)會。此外,臺灣省、西班牙、韓國、英國和日本在研究上也占一定的份額。
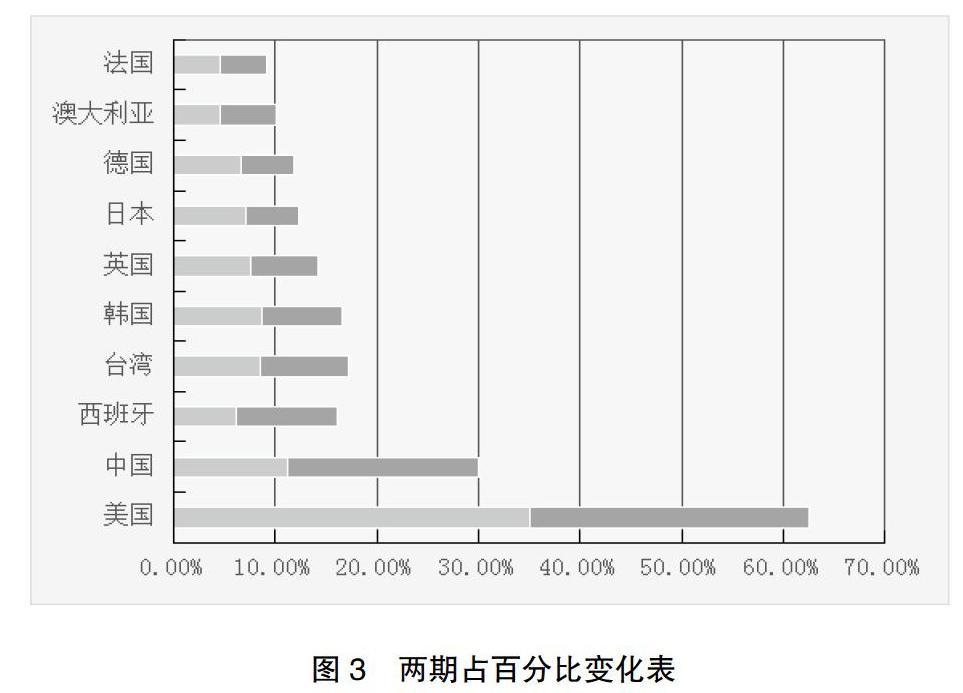
從圖3的增長速度上來看,中國對于無人駕駛汽車(智能汽車)的研究活動異常活躍,2010-2015年相對2006-2010年,國內(nèi)無人駕駛汽車(智能汽車)研究文獻(xiàn)數(shù)量增長了235%,即后5年文獻(xiàn)量是前5年文獻(xiàn)量的將近兩倍半,是增長速度最快的地區(qū),其次是西班牙,增長了230%。在參與份額上,國內(nèi)無人駕駛汽車(智能汽車)研究文獻(xiàn)數(shù)量也增長顯著,漲幅為7.6%,而美國卻下降了7.5%。
隨著無人駕駛汽車(智能汽車)的發(fā)展,可以預(yù)見,美國和中國將繼續(xù)統(tǒng)領(lǐng)無人駕駛汽車(智能汽車)的理論研究,西班牙、臺灣和韓國將有可能成為美中的有力競爭對手。這樣看來,我國的無人駕駛汽車(智能汽車)的研究前途比較寬廣,值得政府、企業(yè)、科研機(jī)構(gòu)繼續(xù)投入政策支持和科研投入,實現(xiàn)彎道超車的機(jī)會還是比較大的,這需要也值得我國的相關(guān)科研人員和企業(yè)、政府繼續(xù)努力。
通過數(shù)據(jù)挖掘和統(tǒng)計分析軟件NE的處理和專家修正,從2302篇SCI文獻(xiàn)的關(guān)鍵詞中提取了技術(shù)核心高頻詞44個,具體見表1。
3 總結(jié)
本文通過大量的SCI文獻(xiàn)的數(shù)據(jù)挖掘,發(fā)現(xiàn)我國對于無人駕駛汽車(智能汽車)的理論研究還是比較詳實和全面的,期刊文獻(xiàn)發(fā)表數(shù)量僅次于美國。增長速度是最為快速的,但是在權(quán)威學(xué)者數(shù)量方面卻表現(xiàn)較為不是十分令人滿意,無人駕駛汽車(智能汽車)的權(quán)威學(xué)者主要集中在西班牙。
通過期刊文獻(xiàn)計量學(xué)的統(tǒng)計運用與專家意見綜合,本研究發(fā)現(xiàn),無人駕駛汽車技術(shù)研究集中在五個方向; 1)車輛位置和姿勢控制;2)數(shù)據(jù)采集轉(zhuǎn)換裝置;3)計算機(jī)邏輯算法;4)道路交通控制系統(tǒng);5)即時車輛路徑控制。這五大研究領(lǐng)域不是獨立存在的,每個領(lǐng)域之間都有關(guān)聯(lián),互為基礎(chǔ)又互相促進(jìn)。并且給出各個領(lǐng)域相關(guān)系數(shù)大的技術(shù)研究“實體”,指出了未來的研究方向。對我國無人駕駛汽車(智能汽車)領(lǐng)域的科學(xué)研究工作具有積極的理論與實踐指導(dǎo)意義。
參考文獻(xiàn):
[1]閆民.無人駕駛汽車的研究現(xiàn)狀及發(fā)展方向[J].汽車維修,2003.
[2]邱均平.文獻(xiàn)計量學(xué)[M].北京:科學(xué)技術(shù)文獻(xiàn)出版社,1988.
[3]A P.STATISTICAL BIBLIOGRAPHY OR BIBLIOMETRICS[J].Journal of Documentation.1969.
[4]Scott W.Cunningham,Alan L.Porter, Nils C. Newman.Special issue on tech mining[J].Technological Forecasting & Social Change,2006.
[5]鄧智心.基于文獻(xiàn)管理軟件NoteExpress的文獻(xiàn)計量學(xué)研究的探討[J].現(xiàn)代情報,2013.
作者簡介:李莎莎(1992-),女,安徽蕭縣人,碩士,在校學(xué)生,研究方向:汽車市場營銷。
猜你喜歡
職工法律天地·下半月(2016年10期)2016-11-30 11:52:57
商情(2016年40期)2016-11-28 11:28:07
商(2016年32期)2016-11-24 17:39:41
科技資訊(2016年18期)2016-11-15 18:05:53
考試周刊(2016年84期)2016-11-11 23:57:34
科技視界(2016年18期)2016-11-03 22:51:40
體育時空(2016年8期)2016-10-25 18:02:39
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 17:46:29
中國科技博覽(2016年18期)2016-10-19 10:30:11
中國市場(2016年36期)2016-10-19 04:31:23
