壓制干擾對雷達探測區域影響的二維可視化方法
2017-01-18 05:31:47戴家君
艦船電子對抗 2016年6期
關鍵詞:方向
商 樂,戴家君
(解放軍91404部隊,秦皇島 066001)
壓制干擾對雷達探測區域影響的二維可視化方法
商 樂,戴家君
(解放軍91404部隊,秦皇島 066001)
研究了壓制干擾的仿真數學模型和Matlab仿真結果,將模型應用于雷達對抗仿真系統中,實現壓制干擾對雷達探測區域影響的二維可視化,動態表現雷達對抗態勢。該系統已應用于工程項目中,取得了較好的效果。
壓制干擾;雷達探測區域;雷達對抗;仿真模型
0 引 言
壓制干擾下雷達探測區域是壓制干擾研究中常用的干擾度量指標。以往對探測區域的仿真大多是一種靜態的仿真結果,即預先設定雷達、干擾設備和目標性能參數以及其載體平臺位置參數,進行一次仿真,得到一次評估結果。這種研究方法適合研究人員對對抗裝備、對抗手段的研究,但不能滿足在瞬息萬變的實戰中指揮員對戰場態勢變化充分了解的需求。因此,本文立足于該需求,研究壓制干擾的各種數學模型和計算方法,在雷達對抗仿真系統中充分考慮仿真中雷達、目標和干擾機參數在仿真系統運行過程中的實時變化,實現壓制干擾對雷達探測區域影響的二維可視化。
1 壓制干擾效能評估指標
評估壓制干擾效能的指標有探測距離、雷達暴露區、壓制系數、自衛距離、檢測概率-距離曲線等等。
干擾壓制的空間體積稱為壓制區,在壓制區內,雷達無法發現目標回波信號,即雷達接收機輸入端的干擾-信號功率比大于等于壓制系數。如果僅研究干擾所壓制的平面面積,如方位×距離、仰角×距離,則這個平面為干擾扇面。如果僅研究一維空間上的干擾效果,則用最小干擾距離表示。
壓制系數是研究干擾效能最重要的參數,在雷達對抗仿真系統中,壓制干擾下雷達探測區域的顯示是干擾效能最為直觀的表現方法。
2 壓制干擾計算方法
2.1 關鍵技術
2.1.1 平臺空間關系
在雷達對抗仿真系統中,動態仿真必須研究仿真過程中實時變化的參數對仿真顯示的影響,如雷達天線掃描方式、雷達天線方向圖、干擾天線主瓣方向等參數。雷達天線、目標和干擾機天線三者的瞬時角度關系如圖1所示。
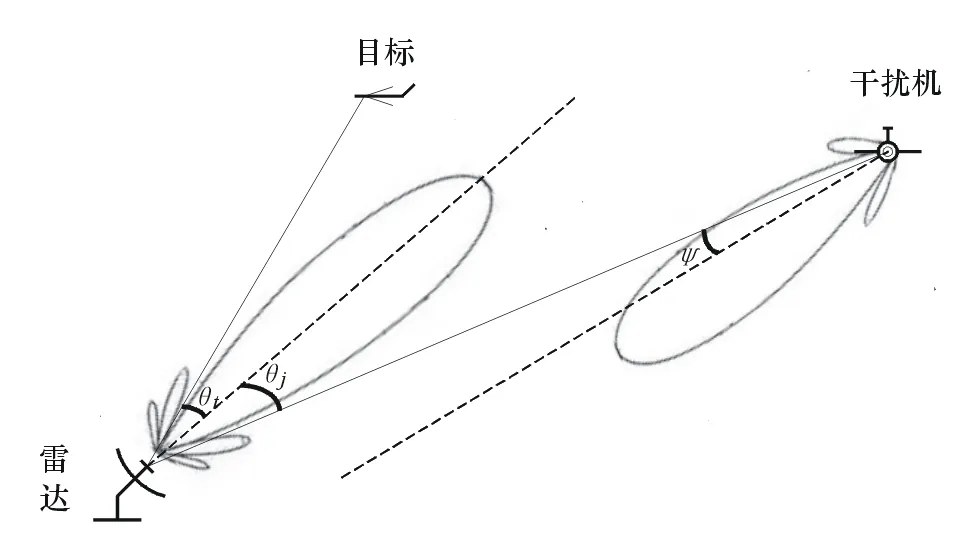
圖1 雷達天線、目標和干擾機天線角度關系
當干擾機天線主瓣方向對準雷達,且雷達主瓣方向對準干擾機時,干擾信號能量能夠最大程度地進入雷達接收機,從而產生最大的干擾效能。從圖中可以看出,雷達天線主瓣方向和干擾機天線主瓣方向都偏離了雷達與干擾機的連線,進入雷達接收機的干擾信號能量相對較少,干擾效能較差。
另一方面,各平臺運動方式和實時位置等對雷達、目標和干擾機的距離產生影響,某時刻三者的距離關系如圖2所示。
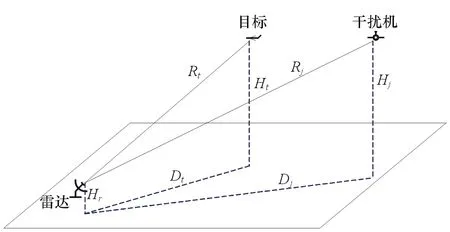
圖2 雷達、目標和干擾機距離關系
計算的結果在二維態勢顯示系統中表現的距離是水平面內的距離,因此有下列距離換算公式:
(1)
(2)
2.1.2 坐標轉換模型
仿真過程中,各機動平臺位置不斷變化,要求實時解算各平臺間距離關系。由于平臺位置是以經緯度的形式給出,因此要考慮地球曲率半徑對距離計算的影響。為將經緯度的信息及時地轉換為地理坐標信息,從計算速度、實時性和適應性等多方面綜合考慮決定采用Boring算法[2],因為其不但可以達到足夠的精度,且公式結構簡單、運算速度快、適應性強,受計算機精度影響最小。實現方法如下:
(3)
(4)
(5)
(6)
(7)
則:
(8)
E=sinDcosW
(9)
(10)
(11)

(12)
(13)
(14)
(15)
式中:e=0.006 738 524 1;λM為原點的經度;φM為原點的緯度;λT為目標點的經度;φT為目標點的緯度;RMT為原點到目標點的距離;AMT為原點到目標點的方位。
采用Boring算法就可以快速求解基于經緯度的地球表面任意兩點的直線距離方位關系。
2.1.3 天線方向圖模型
雷達天線向外輻射和接收電磁能時,在三維空間中的分布可以表示成相對(歸一化)基礎上的曲線,稱為輻射方向圖[3]。方向圖通常用天線功率增益因子G(θ)/G(雷達天線副瓣/主瓣增益比)來描述。壓制干擾研究中,天線方向圖描述了雷達天線各個方向上輻射能量的分布狀況,反映了干擾信號從各個方向進入雷達接收機能量差別,是非常重要的壓制區計算參數。常見的天線方向圖模型有高斯天線方向圖、余割平方天線方向圖等。雷達對抗仿真系統中采用高斯天線方向圖模型[4]。其主瓣方向圖為:
(16)

主瓣以外的方向圖為:
(17)
式中:k=1.391 6/sin(0.5θb)。
若用功率方向圖時,還需要將其平方。θb=15°時仿真結果如圖3、圖4所示。
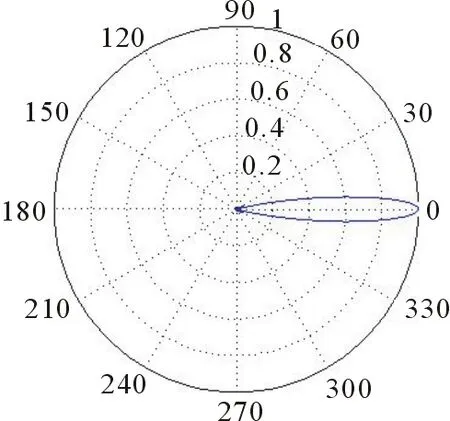
圖3 高斯天線波束形狀圖
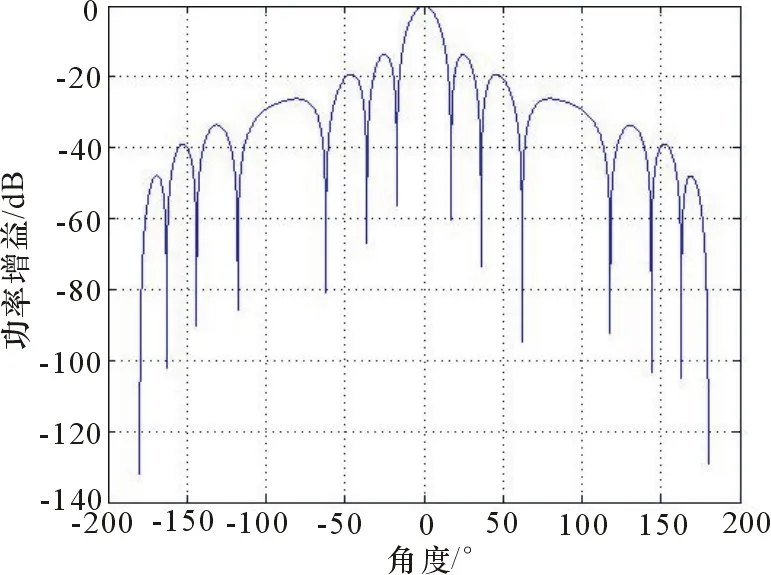
圖4 歸一化高斯天線方向圖
從圖3和圖4可以看出,高斯天線方向圖的特點是具有較多的副瓣,且主副瓣比大,能量比較集中(圖3中因天線副瓣相對主瓣能量很小而不明顯)。
2.2 信號仿真模型
2.2.1 目標信號功率
目標信號功率為:
(18)
式中:Prs為接收機輸入端的目標回波信號;Pt為雷達發射機輸出功率;Gt為雷達發射天線增益;Gr為雷達接收天線增益;F為雷達發射信號中心頻率;Rt為雷達與目標距離;σ為目標雷達截面積;c為光度。
(1) 當Rt為雷達最大探測距離時,Prs就代表雷達能夠檢測到的最小回波信號即接收機靈敏度Smin;
(2) 當采用脈沖壓縮雷達時,設脈壓比為D,則綜合信噪比改善因子可近似為0.8D倍;
(3) 當采用脈沖積累來判別目標回波信號時,則目標信號功率乘以積累改善因子M;
(4) 當采用收發公用天線時,有Gt=Gr;
(5) 當目標偏離雷達天線軸時,即θt≠0,有Gt=Gr=Gt(θt)。
綜合以上幾點,可以得到目標信號功率為:
(19)
式中:Lr為雷達的綜合損耗。
2.2.2 干擾信號功率
干擾信號功率為:
(20)
式中:Prj為雷達接收機接收到的干擾信號;γj為干擾信號對雷達天線的極化損失(圓極化取0.5);Rj為干擾機與雷達的距離;F為雷達工作頻率;Gj(φ)為干擾機天線在雷達方向上的增益,并有:
(21)
式中:Gj為干擾機天線主瓣方向增益;φ0.5為干擾機波瓣寬度;φ為偵察機對雷達定位的誤差角(通常假設取0);K為常數,取0.04~0.10,對于高增益銳方向天線,K=0.07~0.10,對于波束較寬、增益較低的天線,K=0.04~0.06。

(22)
J/S≥Kj
(23)
(24)
式中:PjGj(φ)為有效干擾功率;PtGt(θt)為有效雷達功率。
2.2.3 噪聲信號功率
接收機噪聲主要由接收機中的饋線、放電保護器、高頻放大器或混頻器等產生,它服從零均值正態分布,方差σn2=kTB,k為波爾斯曼常數(1.38×10-23J/K),T為絕對溫度(常溫取290K),B為接收機帶寬(Hz)。因此,最大噪聲功率(額定噪聲功率)Pn=kTB[5]。
接收機靈敏度與噪聲信號功率密切相關,接收機靈敏度(Smin)是指接收機正常工作時可以接收到的最小信號電平,由接收機內部熱噪聲Pn、接收機噪聲系數Fn和檢測所需的最小信噪比(SNR)min決定:
(25)
2.3 干擾仿真模型
2.3.1 自衛干擾模型
當干擾機主瓣方向對準雷達,干擾機偏離雷達主瓣方向θj=θt,從而有Gj(φ)=Gj,Rt=Rj,Gt(θj)=Gt(θt),由公式(24)化簡得:
(26)
雷達和干擾機參數一定,雷達天線對準干擾機的情況下,θt=0,式(26)右端為一常數,記為R0,即燒穿距離或雷達自衛距離。仿真條件:
(1) 雷達參數:功率103W,頻率7×109Hz,主瓣增益45,旁瓣增益6,等效噪聲溫度290K,接收機帶寬106Hz,綜合損耗10dB,虛警概率10-7,極限靈敏度-96dB。
(2) 自衛干擾機參數:功率2×103Hz,增益10,帶寬200×106Hz,RCS為9m2,與雷達的距離250×103m,相對雷達的方位180°。
仿真結果如圖5所示。
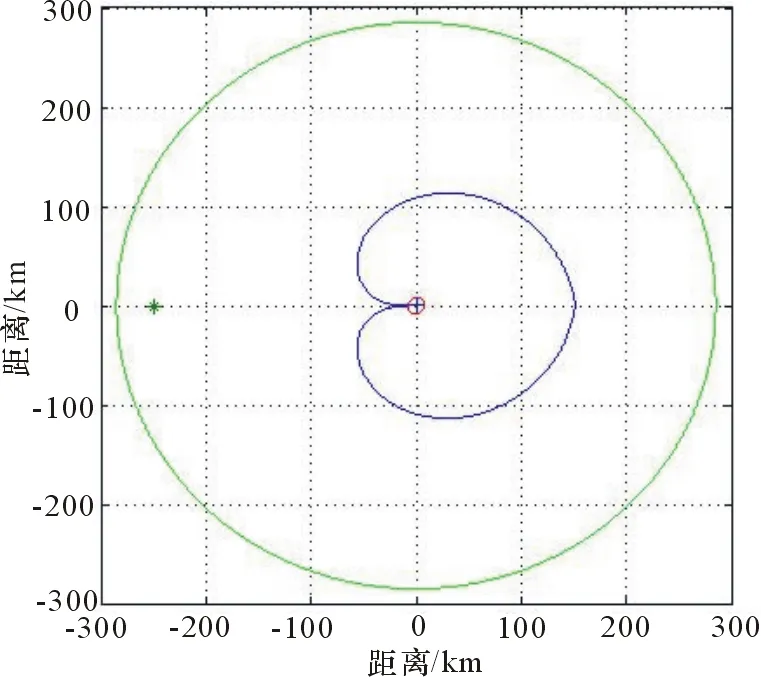
圖5 自衛干擾仿真
圖中心的“+”表示雷達,“*”表示自衛干擾機,大圓表示雷達未受干擾時的探測范圍,心形圓表示雷達受到自衛式干擾時的壓制邊界,中心小圓表示雷達的燒穿距離圈。從圖中可以看出,雷達的探測范圍在壓制干擾下,探測范圍大幅減小,雷達無法有效地發現目標。
2.3.2 單干擾機支援干擾模型
當干擾機天線主瓣方向對準雷達時,干擾機偏離雷達主瓣方向θj,目標偏離雷達主瓣方向θt,有Gj(φ)=Gj,則:
(27)
考慮雷達、目標和干擾機的空間距離關系,如圖2所示。利用式(27)得:
(28)
仿真條件:
(1) 雷達參數和自衛干擾仿真條件相同;
(2) 干擾機參數:功率2×103W,增益10,帶寬200×106Hz,與雷達的距離250×103m,相對雷達的方位150°;
(3) 目標參數:RCS為9 m2,與雷達的距離150×103m,相對雷達的方位180°。
仿真結果如圖6所示。
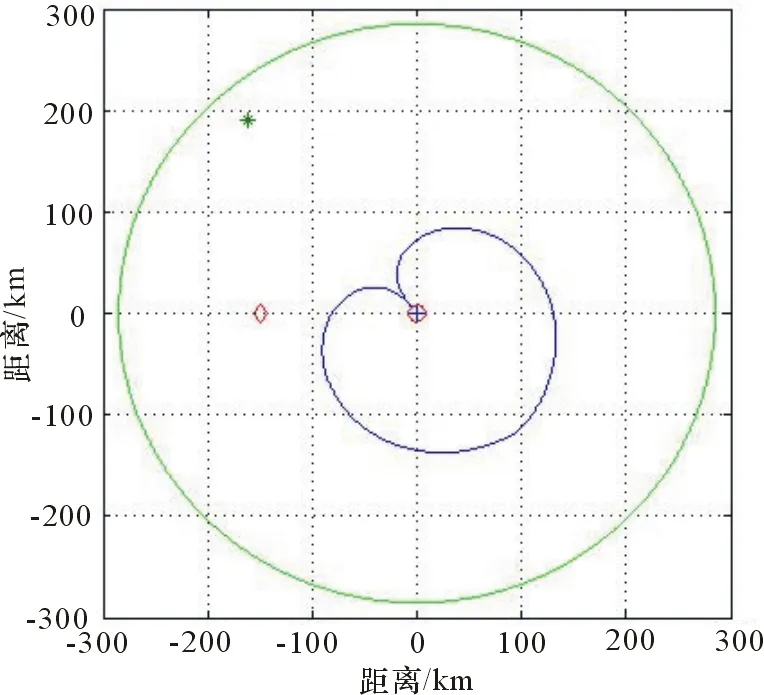
圖6 單部干擾機支援干擾仿真
圖中“◇”符號表示目標,其它符號和線的含義與前一仿真結果相同。從圖中可以看出,雷達的探測范圍在壓制干擾下,探測范圍大幅減小,特別在干擾機方向上,探測距離最短。雷達無法發現目標。
2.3.3 多干擾支援干擾模型
多干擾機同時對1部雷達實施干擾,且天線主瓣方向對準雷達,仿真條件:
(1) 干擾機1位置參數:與雷達的距離400×103m,相對雷達的方位150°;
(2) 干擾機2位置參數:與雷達的距離400×103m,相對雷達的方位180°;
(3) 干擾機3位置參數:與雷達的距離400×103m,相對雷達的方位210°。
其它參數與前一仿真相同,仿真結果如圖7所示。
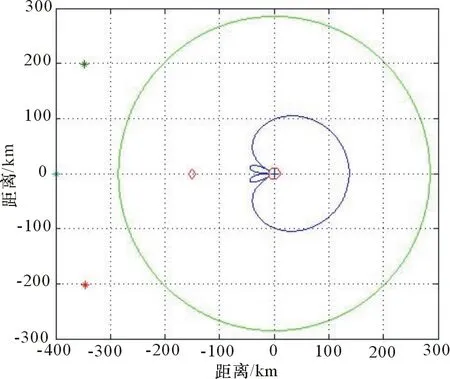
圖7 3部干擾機對雷達實施壓制干擾
圖中符號和線的含義與前一仿真結果相同。從圖中可以看出,雷達的探測范圍在3部干擾機同時實施的壓制干擾下,在干擾機方向上的探測距離減小明顯,其它方向距離也大幅減小,雷達無法發現目標。
3 雷達對抗仿真系統中應用實例
在上述壓制干擾研究的基礎上開發的雷達對抗仿真系統的二維可視化界面如圖8所示。
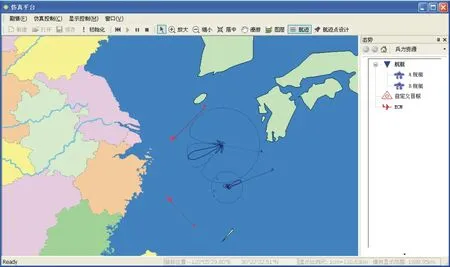
圖8 壓制干擾條件下雷達探測區域二維可視化
該實例中的對抗兵力模型包括干擾機1、干擾機2、艦艇1和艦艇2,兩艦艇上各搭載1部搜索雷達。仿真中假設干擾機的頻率范圍已覆蓋艦載雷達的頻率,且干擾方向為全向360°,因此在對抗算法解算中干擾信號能量取干擾機功率和增益的乘積值,即全向等效輻射功率。對抗兵力模型參數如表1、表2所示。
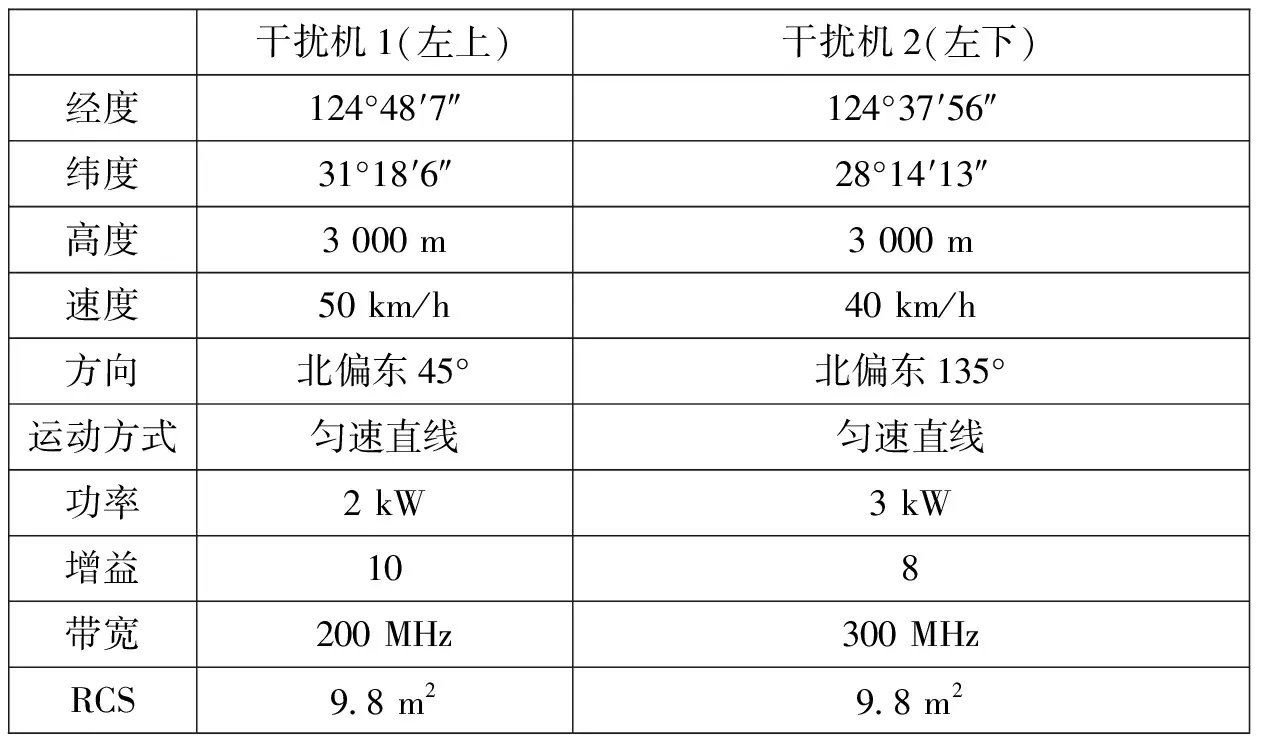
表1 干擾機模型參數表
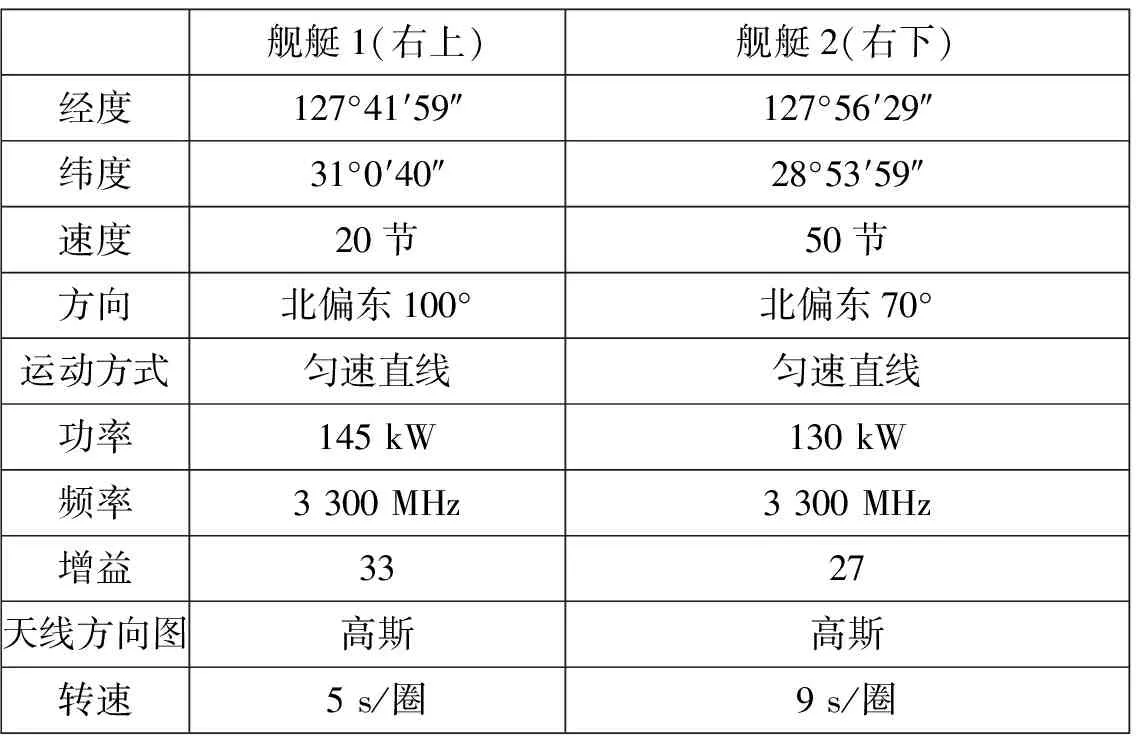
表2 艦艇及其雷達模型參數表
圖8中2條閉合虛線分別表示艦載雷達的探測區域邊界。當雷達目標處于該邊界范圍之內時,雷 達發現目標;當雷達目標處于該邊界范圍之外時,雷達不能發現目標。仿真開始后,各仿真兵力按照各自預設路徑軌跡運動,雷達發射波束的天線方向圖分別以雷達所在坐標點為中心,按天線轉速進行旋轉,方向圖主瓣的頂點落在雷達探測區域邊界上;2架干擾機同時對2艘艦艇上的雷達進行壓制干擾,雷達的探測區域出現不同程度的縮小,特別在2架干擾機方向上,艦艇1和艦艇2平臺上的雷達探測距離大幅減小。這樣干擾機就能夠為干擾方提供一定的支援干擾,掩護其它作戰兵力接近敵方艦船,遂行作戰任務。
4 結束語
在對壓制干擾相關數學模型進行研究和仿真的基礎上,重點考慮工程應用中需要注意和解決的問題和關鍵技術,在雷達對抗仿真系統中實現了壓制干擾對雷達探測區域影響的二維可視化,具有較好的實用價值。
[1] 邵國培.電子對抗作戰效能分析[M].北京:解放軍出版社,1998.
[2] 李相民,吳保寧,范洪達.Boring算法定位精度分析[J].火力指揮與控制,1995,21(3):32-35.
[3] SKOLNIK M I.Radar Handbook[M].王軍,林強,米慈中,等譯.北京:電子工業出版社,2003.
[4] 王國玉,汪連棟.雷達電子戰系統數學仿真與評估[M].北京:國防工業出版社,2004.
[5] 丁鷺飛,耿富錄.雷達原理[M].西安:西安電子科技大學出版社,2005.
[6] 田秀麗,崔亦斌,王國平.電子干擾條件下地空導彈雷達干擾壓制區計算方法[J].現代防御技術,2008,36(4):111-115.
[7] 王國玉,肖順平,汪連棟.電子系統建模仿真與評估[M].長沙:國防科技大學出版社,1999.
2-D Visual Method of Blanket Jamming Influencing Radar Coverage
SHANG Le,DAI Jia-jun
(Unit 91404 of PLA,Qinhuangdao,066001,China)
This paper studies the simulation maths model and Matlab simulation result of blanket jamming,uses the model into radar countermeasure simulation system,realizes the 2-D visual of blanket jamming to radar coverage,represents the dynamic situation of radar countermeasure.The system has already been applied to engineering items and good effect has been fetched.
blanket jamming;radar coverage;radar countermeasure;simulation model
2016-05-02
TN974
A
CN32-1413(2016)06-0027-05
10.16426/j.cnki.jcdzdk.2016.06.005
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50