車輛ISD懸架系統網絡綜合及性能分析
2017-01-06 10:15:08聶佳梅張孝良陳國濤
振動與沖擊 2016年24期
聶佳梅, 張孝良, 陳國濤
(江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013)
車輛ISD懸架系統網絡綜合及性能分析
聶佳梅, 張孝良, 陳國濤
(江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013)
為進一步改善車輛的乘坐舒適性,將慣容器元件應用到車輛被動懸架系統,構建ISD懸架,利用網絡綜合方法確定ISD懸架結構。以車身加速度均方根值為優化目標,求解出ISD懸架的正實阻抗傳遞函數,然后用慣容器、彈簧、阻尼元件將之物理實現出來,建立1/4車輛懸架模型。采用多目標優化方法對ISD懸架參數進行優化,在此基礎上,分析隨機和脈沖激勵下ISD懸架系統的綜合性能。結果表明,與傳統懸架相比,ISD懸架系統具有良好的動態性能,車身加速度均方根值減小了26.83%,1~3 Hz范圍內有效抑制了車身垂直振動,改善了車輛在低頻段的乘坐舒適性。
懸架;慣容器;網絡綜合;多目標優化;乘坐舒適性
汽車懸架是車身與車橋之間一切傳力裝置的總稱,傳統懸架系統的主要隔振元件為彈性元件和阻尼元件。SMITH[1-2]基于機電相似性理論提出了慣容器元件,并將之應用到車輛懸架系統的研究中。由慣容器、彈簧和阻尼器組成的機械網絡擁有比彈簧和阻尼機械網絡更豐富的網絡特性。同時,慣容器的出現解決了原本電子網絡與機械網絡不完美的對應關系,因此,可以利用針對R-L-C電子網絡的網絡綜合理論去研究“慣容-彈簧-阻尼”(I-S-D)機械網絡,以改善機械振動系統的隔振性能。
近年來,慣容器在車輛懸架系統、轉向系統、建筑隔振系統中的應用研究成為了熱點[3-7],網絡綜合與分析理論也不斷地被應用到ISD懸架系統的研究中。WANG等[8]利用網絡綜合的方法提出了一種由滾珠絲杠慣容器和永磁電機組成的機電懸架,這種機電懸架的性能優于傳統被動懸架。SCHEIBE等[9]基于1/4車輛懸架模型,用網絡分析的方法,獲得了行駛平順性和操縱穩定性的全局最優。PAPAGEORGIOU等[10]嘗試用正實綜合方法研究ISD懸架系統,尋找出一種能夠改善輪胎接地性能的ISD懸架結構。由慣容器、彈簧和阻尼元件組成的ISD懸架結構多種多樣,到目前為止,對ISD懸架的研究,都是先假定懸架結構,然后采用各種方法優化懸架結構參數。這樣容易將ISD懸架網絡局限在幾種固定的結構,可能會忽略掉一些性能優良的結構形式。
為了能夠涵蓋更多的懸架結構,本文將懸架結構的求解問題轉化為求解正實魯棒控制器問題,利用遺傳算法結合LMI算法求解BMI(雙線性矩陣不等式),以車身加速度均方根值為性能指標進行單目標綜合,綜合出一種以舒適性為導向的ISD懸架結構,采用多目標優化方法對其參數進行優化,對優化后的懸架進行仿真分析,與傳統被動懸架進行對比,研究隨機激勵和脈沖激勵下ISD懸架系統的動態響應和性能改善情況。
1 慣容器懸架系統網絡綜合
懸架網絡綜合與電子網絡綜合相對應,就是將懸架系統作為一個機械網絡,根據路面輸入和期望的車輛性能輸出,先求出懸架的正實阻抗傳遞函數,然后用慣容器、彈簧和阻尼器三種基本元件物理實現出來。
1.1 以阻抗形式表示的ISD懸架單輪模型
在車輛懸架系統里面,為了保持車體高度,一定會有彈簧元件,因此我們可以將懸架單輪模型表示成如圖1所示的形式,懸架結構分為已知部分和未知部分,已知部分為彈簧ks,未知部分Y(s)為彈簧、阻尼及慣容器任意組合的復域機械阻抗。
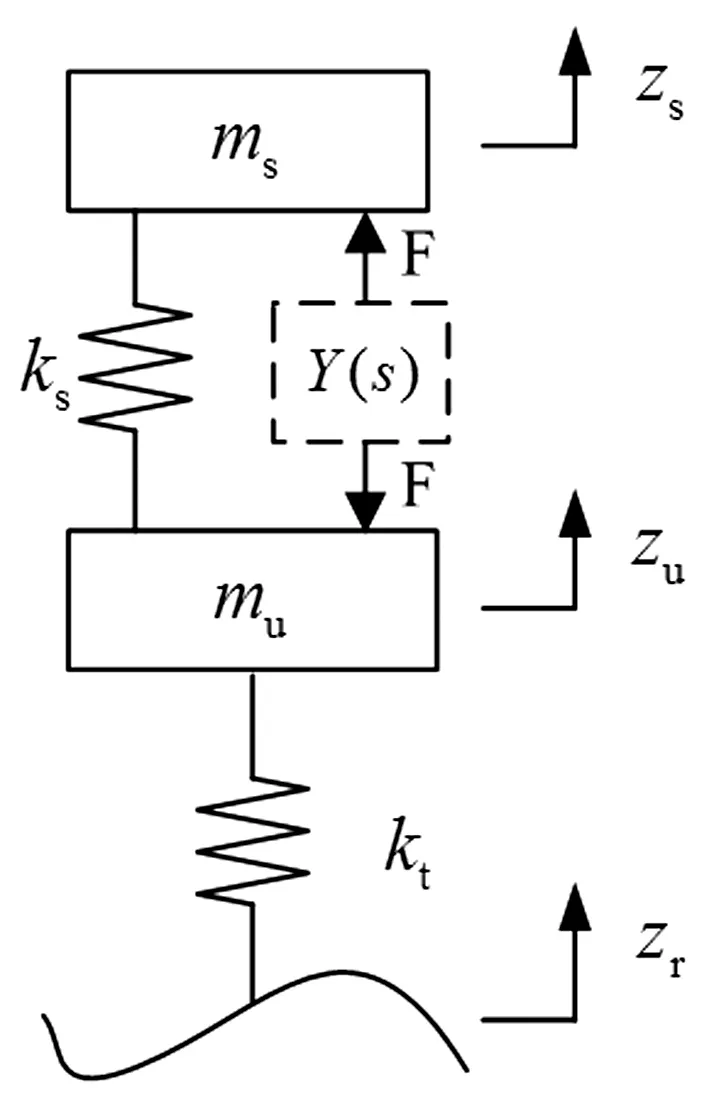
圖1 懸架單輪模型Fig.1 Quarter-car model
其中,mu為非簧載質量;ms為簧載質量;zr為路面隨機輸入;zu為非簧載質量位移;zs為簧載質量位移;F為懸架未知結構部分產生的作用在簧上質量和簧下質量的力;kt為輪胎剛度。
動力學方程為:
(1)
輸入變量為:w=[zrF]T
對應的狀態方程為:
(2)
其中:
1.2 ISD懸架網絡正實H2魯棒控制器設計
則圖1所示懸架的廣義系統可表示如下:
(3)
為了能夠實現所有種類的ISD被動懸架系統,把ISD懸架結構的求解問題轉化為魯棒控制問題,于是Y(s)就可以看成是一個魯棒控制器K(s),將控制器寫成狀態空間形式[11]:
(4)
(5)
式中:xk為控制器的狀態向量,yk代表控制器輸出,uk代表控制器輸入,Ak、Bk、Ck、Dk是待確定的正實控制器參數矩陣。
將廣義懸架系統與魯棒控制器結合起來形成增廣的閉環系統:
(6)


(7)
(8)
式(7)和(8)均為雙線性矩陣不等式。
1.3 ISD懸架系統網絡綜合
以車身加速度均方根值為優化目標,尋找側重提高車輛乘坐舒適性的ISD懸架結構。
根據文獻[12],傳遞函數Ty→z(jw)的H2范數可表示為:
(9)

(10)
車身加速度均方根值J1為
(11)
選取簧載質量m2=317.5 kg,非簧載質量m1=45.4 kg,輪胎剛度kt=192 kN/m,懸架彈簧剛度ks=18 kN/m,車輛以20 m/s的速度駛過不平度系數為G0=6.4×10-7m3/cycle的路面。在MATLAB環境下利用LMI工具箱結合遺傳算法聯合Path-following方法解BMI。取ks=18 kN/m,求得二階控制器為:
(12)

由圖2可以看到,控制器的二階網絡實現結構是兩級串聯結構:第一級由彈簧k1和阻尼器c1并聯組成,與傳統被動懸架相同;第二級由慣容器b和阻尼器c2并聯組成。因c2的值非常小,可以考慮去除c2元件,從而得到新的結構,第二級僅由慣容器元件b組成。將新結構應用到車輛懸架系統,建立ISD懸架1/4車輛模型,如圖3所示。
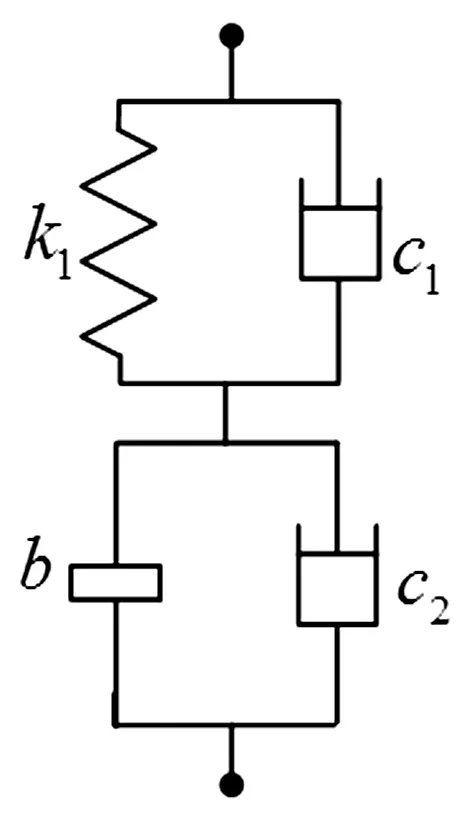
圖2 控制器K(s)的二階網絡實現結構Fig.2 The realization structure of the second order controller
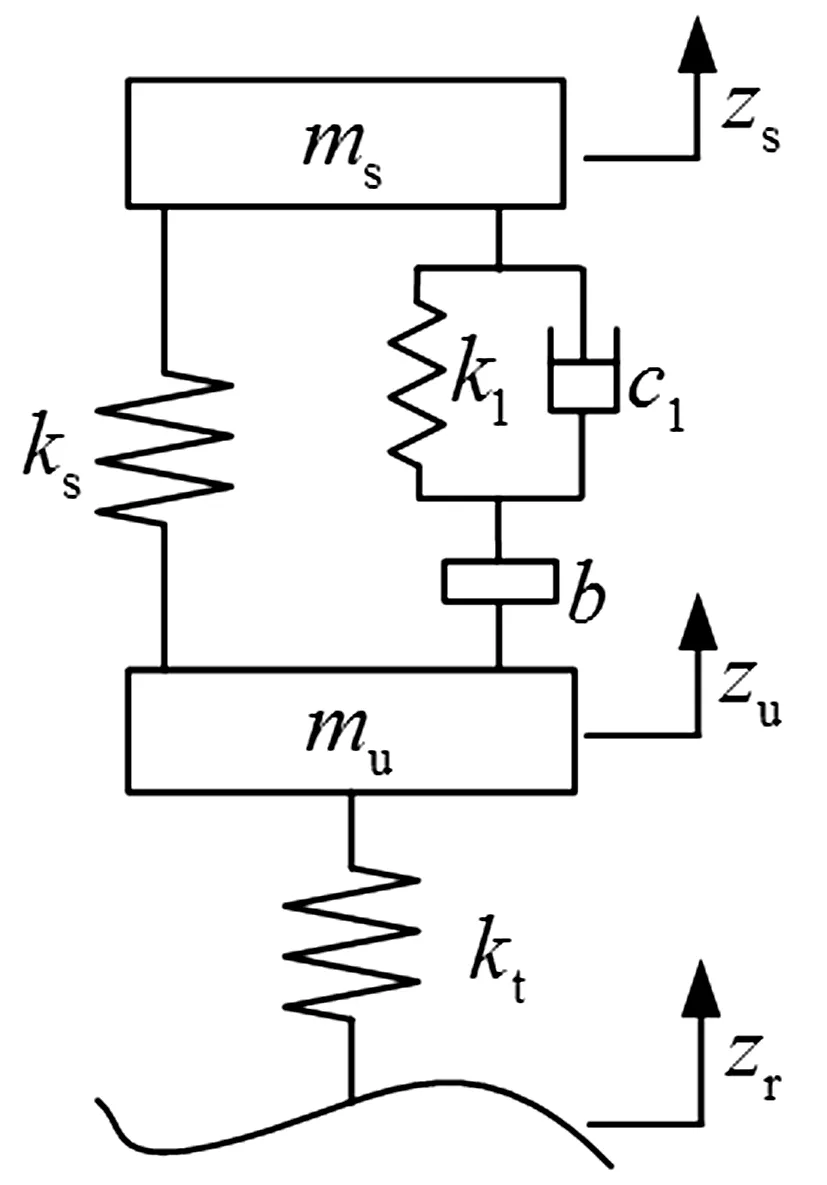
圖3 ISD懸架1/4車輛模型Fig.3 Quarter-car model of ISD suspension
2 多目標規劃確定ISD懸架參數
在傳統的汽車設計中,懸架參數的確定是單獨考慮車輛的乘坐舒適性或者以減小輪胎對路面動載荷為目的而進行的。本文為了對比分析ISD懸架與傳統懸架的綜合性能,發掘ISD懸架的潛在優勢,綜合考慮乘坐舒適性、輪胎動載荷和懸架動撓度三方面因素,采用多目標規劃法確定ISD懸架結構參數[13]。
選擇車身加速度均方根值J1為乘坐舒適性目標函數f1(x),輪胎動載荷均方根值J2作為輪胎接地性目標函數f2(x),懸架動行程均方根值J3作為影響車身姿態且與懸架結構設計、布置相關的目標函數f3(x),期望找到在懸架動行程和輪胎動載荷均方根值不大于傳統懸架的情況下,側重提高乘坐舒適性的ISD懸架參數。
該多目標規劃問題的數學模型可以表示為:
minF(x)=(f1(x),f2(x),f3(x)),
s.t.LB≤xi≤UB
(13)
式中xi為決策變量,UB和LB分別代表其上下限,考慮大多數轎車的實際懸架參數,決策變量取值區間見表1。
假定車輛以v=20 m/s的速度行駛在不平度系數為G0=6.4×10-7m3/cycle的路面上,選擇速度白噪聲作為路面輸入,通過設置相關參數利用NSGA-Ⅱ算法進行多目標優化,種群規模為100,交叉、變異概率取為默認值,進化60代,確定出側重于提高乘坐舒適性的懸架參數,見表2。
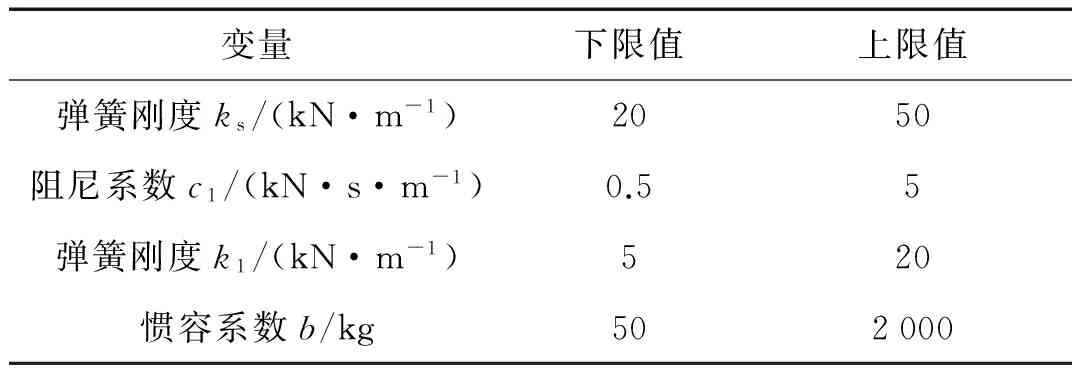
表1 決策變量取值區間Tab.1 Limit values of the decision variables
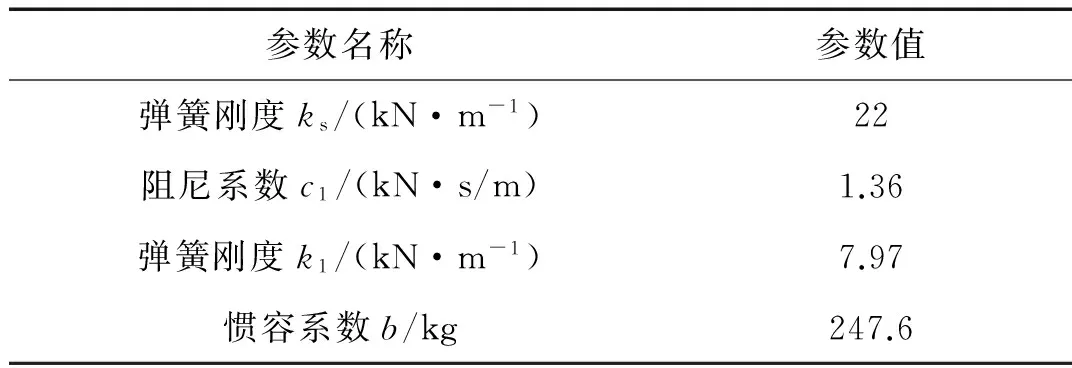
表2 ISD懸架參數多目標優化結果Tab.2 Multi-objective optimization results of the ISD suspension parameters
3 ISD懸架系統性能分析
為分析ISD 懸架性能,分別采用隨機和確定性兩種路面作為輸入,以傳統懸架為比較對象,分析系統響應情況。
3.1 隨機響應
對于隨機路面輸入,取積分白噪聲的時域表達式作為路面輸入模型,其輸入方程為
(13)
式中:w(t)為均值為零的Gauss白噪聲;G0為路面不平度系數;u為車輛行駛速度。
車輛以u=20 m/s駛過不平度系數為G0=5×10-6m3/cycle的路面時,系統隨機響應輸出功率譜密度如圖4所示,響應均方根值如表3所示。
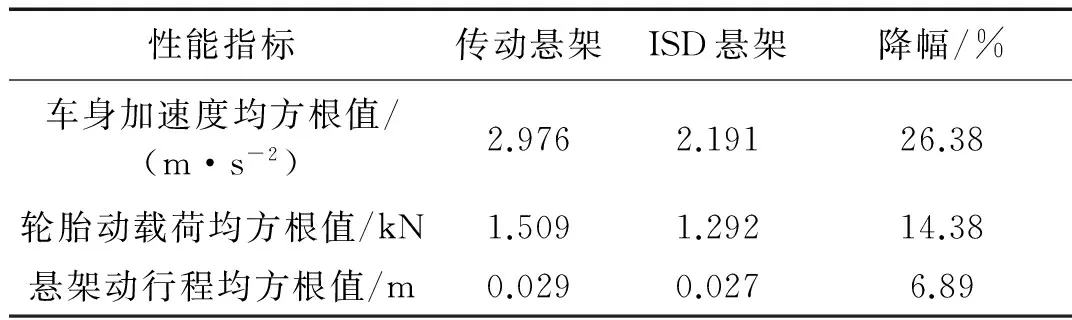
表3 隨機響應輸出均方根值Tab.3 RMS values of random response outputs
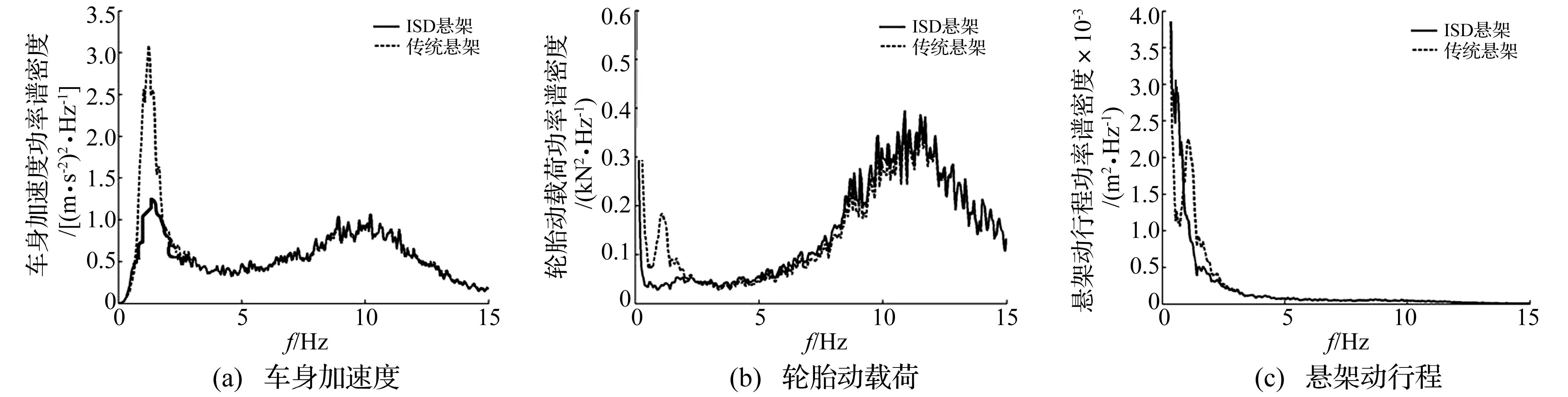
圖4 隨機響應輸出功率譜密度Fig.4 Power spectral density of random response outputs
由圖4可以看出,在大于3 Hz的高頻部分,ISD 懸架和傳統懸架各性能指標的功率譜密度基本重合;在0~3 Hz 的低頻部分,與傳統懸架相比,ISD 懸架的車身加速度功率譜密度和輪胎動載荷功率譜密度明顯下降,說明車身共振得到有效抑制,懸架動行程功率譜密度在2~4 Hz范圍內也有所下降,僅在0~1 Hz范圍有輕微惡化。由表3可知,與傳統懸架相比,ISD 懸架的車身加速度均方根值下降了26.38%,輪胎動載荷均方根值下降了14.38%,懸架動行程均方根值下降了6.89%。可見,ISD 懸架明顯改善了車輛乘坐舒適性。
3.2 脈沖響應
對于確定性路面輸入,根據國標GB 5902—1986,取長坡形單凸塊作為脈沖輸入,速度輸入方程為:
(15)
式中,u為車輛的行駛速度,Am=0.1 m,L=5 m。
車輛以u=10 m/s駛過由式(15)所表示的長坡形凸塊時,系統時域響應輸出如圖5。
為了比較脈沖輸入下2種懸架的動態性能,這里采用峰峰值(Peak-to-Peak,PTP)的評價方法進行定量計算,計算方法如下:
PTP=max(x(t)) -min(x(t))
式中:x(t)表示系統脈沖響應輸出。
根據上式的計算方法對圖5所示的響應輸出數據進行峰峰值計算,脈沖響應輸出的峰峰值見表4。
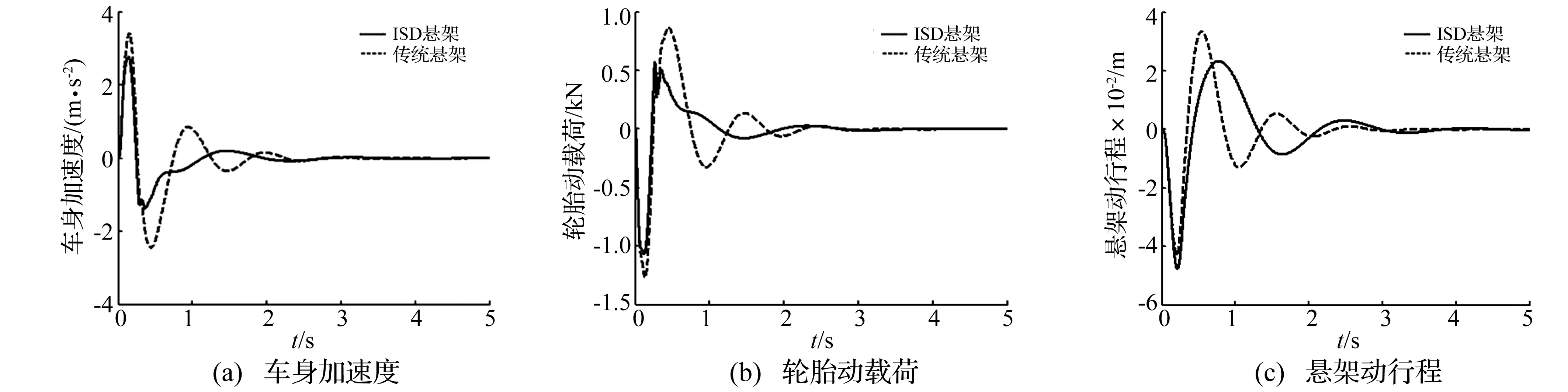
圖5 系統脈沖輸入響應Fig.5 Pulse input responses of system
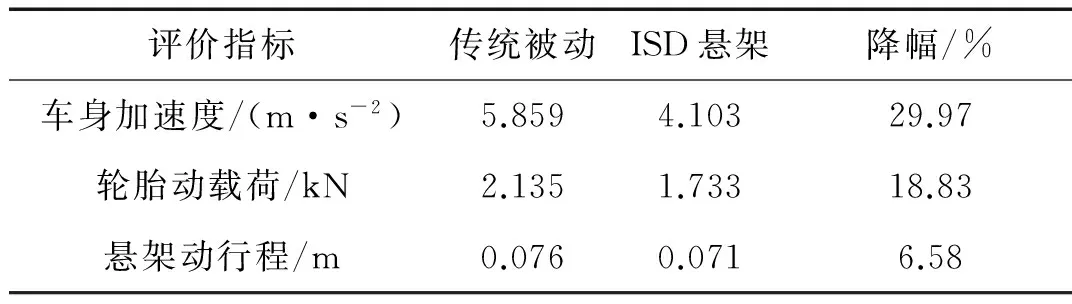
評價指標傳統被動ISD懸架降幅/%車身加速度/(m·s-2)5.8594.10329.97輪胎動載荷/kN2.1351.73318.83懸架動行程/m0.0760.0716.58
結合圖5和表4可知,與傳統被動懸架相比,ISD懸架的車身加速度峰峰值減小了29.97%,輪胎動載荷峰峰值減小了18.83%,懸架動行程峰峰值減小了6.58%,可見,ISD懸架明顯改善了車輛的乘坐舒適性。圖5還顯示,與傳統被動懸架相比,ISD懸架響應輸出的振蕩次數少,調節時間短,響應輸出能夠迅速復位,表明其具有良好的動態性能。
4 結 論
(1) 采用網絡綜合的方法,可以從眾多未知的組合中求解出目標性能最佳的ISD懸架系統,這種求解方法具有一般性。
(2) ISD 懸架有效抑制了車輛低頻垂直振動,改善了車輛乘坐舒適性;同時,ISD 懸架系統穩態響應時間短,響應輸出超調量小,具有良好的動態性能。
[1] SMITH M C. Synthesis of mechanical networks: the inerter[J]. IEEE Transactions on Automatic Control, 2002, 47(10): 1648-1662.
[2] SMITH M C.Performance benefits in passive vehicle suspensions employing inerters[J].Vehicle System Dynamics, 2004, 42(4): 235-257.
[3] 陳龍,楊曉峰,汪若塵,等.改進的ISD 三元件車輛被動懸架性能的研究[J].汽車工程,2014,36(3):340-345. CHEN Long,YANG Xiaofeng,WANG Ruochen,et al. A study on the performances of vehicle passive suspension with modified inerter-spring-damper three-element structure[J]. Automotive Engineering, 2014,36(3):340-345.
[4] ZHANG Xinjie, AHMADIAN M, GUO Konghui.On the benefits of semi-active suspensions with inerters[J].Shock and Vibration, 2012, 19(3): 257-272.
[5] EVANGELOU S, LIMEBEER D J N, SHARP R S, et al. Control of motorcycle steering instabilities: passive mechanical compensators incorporating inerters[J]. IEEE Control Systems Magazine, 2006, 26(5): 78-88.
[6] CHENG Weichen. The applications of inerter to building suspension[D]. Taipei: National Taiwan University, 2007.
[7] WANG Fucheng, LIAO Minkai, LIAO Bohuai, et al. The performance improvements of train suspension systemswith mechanical networks employing inerters[J]. Vehicle System Dynamics, 2009, 47(7):805-830.
[8] WANG F C,CHAN H A.Mechatronic suspension design and its applications to vehicle suspension control[J].Proceedings of the 47th IEEE Conference on Decision and Control Cancun,2008,16(5):3769-3774.
[9] SCHEIBE F,SMITH M C.Analytical solutions for optimal ride comfort and tyre grip for passive vehicle suspensions[J].Vehicle System Dynamics,2009,47(10):1229-1252.
[10] PAPAGEORGIOU C, SMITH M C. Positive real synthesis using matrix inequalities for mechanical networks: application to vehicle suspension[J]. IEEE Transactions on Control System Dynamics, 2006, 14(3): 423-435.
[11] 廖柏淮.被動式機械系統之網路實現——慣質與線性矩陣不等式在火車懸吊系統上之應用[D].臺北:國立臺灣大學,2006.
[12] 俞立. 魯棒控制——線性矩陣不等式處理方法[M]. 北京:清華大學出版社,2002.
[13] SHIRAHATT A, PRASAD P S S, PANZADE P, et al.Optimal design of passenger car suspension for ride and road holding [J].Journal of the Brazilian Society of Mechanical Sciences and Engineering,2008,30(1): 66-76.
The network synthesis and characteristics analysis of an inerter-spring-damper suspension system
NIE Jiamei, ZHANG Xiaoliang, CHEN Guotao
(School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
In order to improve the ride comfort of vehicles, an inerter was applied to a vehicle suspension system to build “inerter-spring-damper” (ISD) suspension. The structure of the ISD suspension was determined by using a network synthesis method. The impedance transfer function of the ISD suspension was obtained with the root-mean-square (RMS) of the vehicle body acceleration as the ride comfort index. It could be physically realized by using passive elements such as inerter, spring and damper. A quarter car vehicle model was built. By using the multi-objective optimization method, structural parameters of the ISD suspension were optimized. On this basis, the performance of the suspension system was verified under random and pulse input. The results show that in contrast to conventional suspension, the proposed suspension has a better dynamic performance. The RMS of body vertical acceleration is reduced about 26.83%. The ISD suspension can suppress vertical vibration of vehicle body within the frequency of 1-3 Hz and improve the ride comfort of vehicles.
suspension;inerter;network synthesis;multi-objective optimization;ride comfort
國家自然科學基金項目(51405202);江蘇省自然科學基金項目(BK20130521);江蘇大學高級人才啟動基金項目(09JDG054);中國博士后科學基金項目(2015M570408);江蘇省“六大人才高峰”項目(2013-JNHB-001)
2015-07-09 修改稿收到日期:2015-12-30
聶佳梅 女,博士,講師,1981年9月生
張孝良 男,博士,副教授,1979年1月生
U463.33
A
10.13465/j.cnki.jvs.2016.24.019
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
福建輕紡(2022年4期)2022-06-01 06:26:06
現代儀器與醫療(2021年2期)2021-07-21 02:19:12
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
