基于LiDAR點云的建筑物邊界提取及規則化
2016-12-27 09:15:23趙小陽
地理空間信息 2016年7期
趙小陽,孫 穎
(1. 廣州市城市規劃勘測設計研究院,廣東 廣州510060;2.中山大學 地理科學與規劃學院,廣東 廣州510275)
基于LiDAR點云的建筑物邊界提取及規則化
趙小陽1,孫 穎2
(1. 廣州市城市規劃勘測設計研究院,廣東 廣州510060;2.中山大學 地理科學與規劃學院,廣東 廣州510275)

在無需定義主方向及建筑物形狀的前提下,提出了一種適合于各種類型建筑的邊界提取算法。首先利用凸包算法進行建筑物邊界點的提取及排序,接著利用分組的Douglas-Peucker (D-P)算法進行邊界特征點的提取,最后實現建筑物邊界弧段部分的擬合。
LiDAR;點云;建筑物邊界提取;規則化
城市作為時空信息的重要主體正發生著日新月異的變化,建筑物則是空間信息中最容易發生變化和需要更新的要素。快速提取建筑物和進行建筑物變化檢測在GIS數據庫更新、土地利用、數字化城市等諸多方面具有重要的作用[1]。其中,二維建筑物邊界是其他應用的基礎[2]。LiDAR技術的發展,給建筑物的邊界提取帶來了新的研究視角[3]。在利用LiDAR數據進行建筑物提取的研究中,有些采用內插的LiDAR數據,如柵格[4]、不規則三角網[5];而有些則利用單個激光點[6-7],能為后續的應用如邊界提取、3D重建最大限度地保留點云原始信息。另外,目前多數基于LiDAR的邊界提取方法需定義主方向或形狀[5,8],事實上建筑物的形狀各異,其邊界線段與主方向的關系并非都是平行或垂直,且事先假定的形狀并不能囊括現實中所有的建筑物形狀。因此,研究適合于各種形狀建筑物邊界提取的方法非常必要。本文利用分類后的建筑物單點數據,在無需定義主方向和形狀的前提下,提出了一種適合于各類建筑物的邊界提取及規則化算法。
1 研究方法
針對分類后的建筑物點云,首先利用空間聚類算法進行每一棟建筑物的提取,并排除由遮擋引起的空白區域;然后利用凸包算法進行建筑物邊界點的提取及排序,進而用分組的D-P算法進行邊界特征點的提取;最后實現弧段部分的擬合,具體流程如圖1所示。
1.1 邊界點的提取及排序
在生成建筑物邊界前,需對建筑物邊界的激光點進行提取并排序,以建立相鄰點間的拓撲關系。本文利用凸包算法[9]進行建筑物邊界點的提取及排序,算法直接采用圓形鄰域:
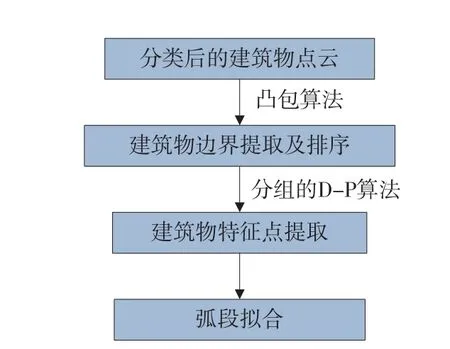
圖1 本文建筑物邊界提取流程圖
1)選擇X坐標最小的點作為初始點,y軸正向為起始方向。
2)以當前點為圓心,先以1倍柵格大小為半徑,建立圓形鄰域:①若鄰域內有一點,該點為下一點;②若鄰域有多點,則判斷以前面兩點連線為起算方向,當前點與鄰域內各點連線間的順時針夾角,夾角小為下一點;若角度相同則選擇距離最近的點;③若鄰域內無點,執行步驟3)。
3)計算當前點的2.5倍鄰域:執行步驟2)中的①、②步。
實驗表明,采用1倍、2.5倍雙鄰域的判別比單獨采用2.5倍鄰域提高了1倍的速度。圖2為該棟建筑物執行排序的過程及最終結果,點位順序采用折線相連的方式體現。
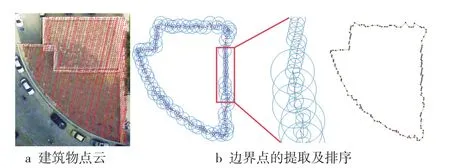
圖2 建筑物邊界點的排序
1.2 特征點提取
直接按順序連接上述點得到的邊界有嚴重鋸齒現象。因而對邊界點云進行簡化,獲取建筑物邊界的特征點是非常必要的。D-P算法[10]是目前公認有效的線狀要素簡化算法,但建筑物是閉合面,無法直接使用D-P算法,因而本文選擇了連續的n個點來使用D-P算法。實驗選擇了3、5、7個點進行測試,最終發現5 個點可以保證建筑物形狀不被過度簡化,同時避免了噪聲點的影響,如圖3a所示。經兩次迭代后,房屋邊界的特征點提取如圖3b:紅色點代表原始點云,藍色三角代表特征點。
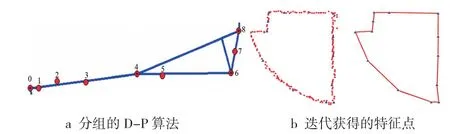
圖3 分組D-P算法獲得的特征點
1.3 建筑物邊界規則化
實際中有些建筑物的邊界是弧段。為接近建筑物真實形狀,本文利用相鄰直線段的關系將其擬合為弧段。根據解析幾何知識:圖4中相鄰3條線段L1、L2、L3在滿足一定條件的基礎上可擬合為一個弧段。
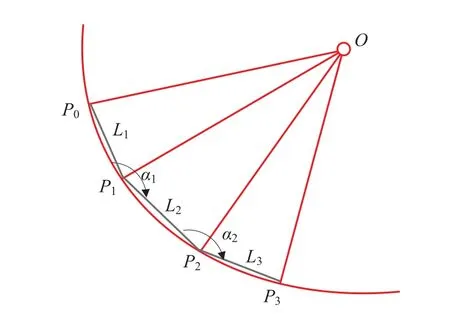
圖4 圓上相鄰弧段與弦夾角的關系
圖4中a1為弦L1和L2的夾角,a2為弦L2和L3的夾角,圓內兩弦與半徑以及弦與夾角之間滿足如下關系:

若|R1-R2|/(R1+R2)/2≤δR,則上述3條相鄰直線段可擬合為圓弧。
2 實驗結果及精度分析
2.1 實驗數據
采用了2個區域(以下稱為A區域和B區域)經過分類后的建筑物點云數據,如圖5所示。實驗區域的建筑物形狀各異,有凹的、凸的、矩形的、帶有弧段的以及島狀結構的等。
2.2 實驗結果及分析
實驗結果表明,在未判斷主方向的情況下,采用本文方法提取的矩形建筑物邊界探測結果很好,且對于有弧段的建筑物,將其擬合為弧段更加逼近了建筑物的真實形狀。為進一步說明該方法的有效性,將實驗結果與參考數據進行疊加,如圖6所示,除因點云分類引起的建筑物合并或分離外,多數的提取結果較為理想。
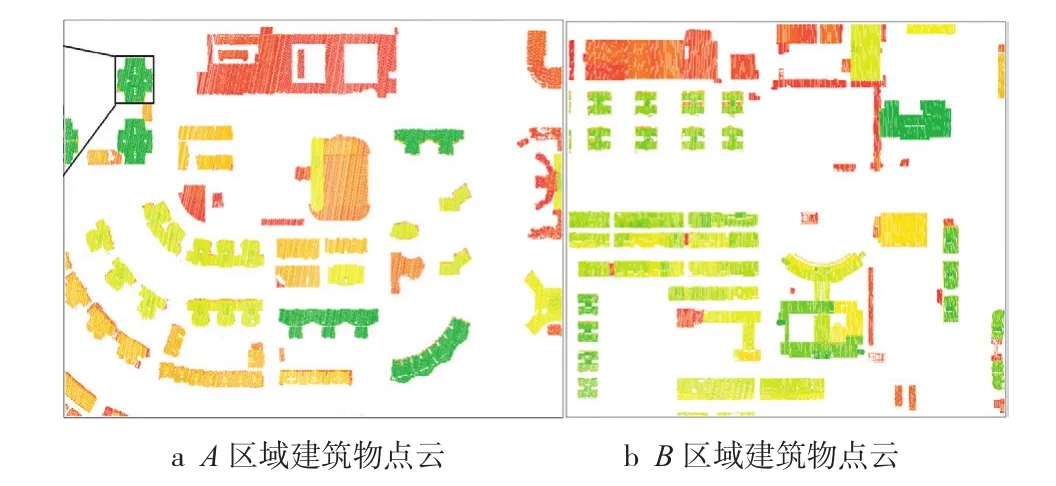
圖5 建筑物點云和建筑物邊界探測結果
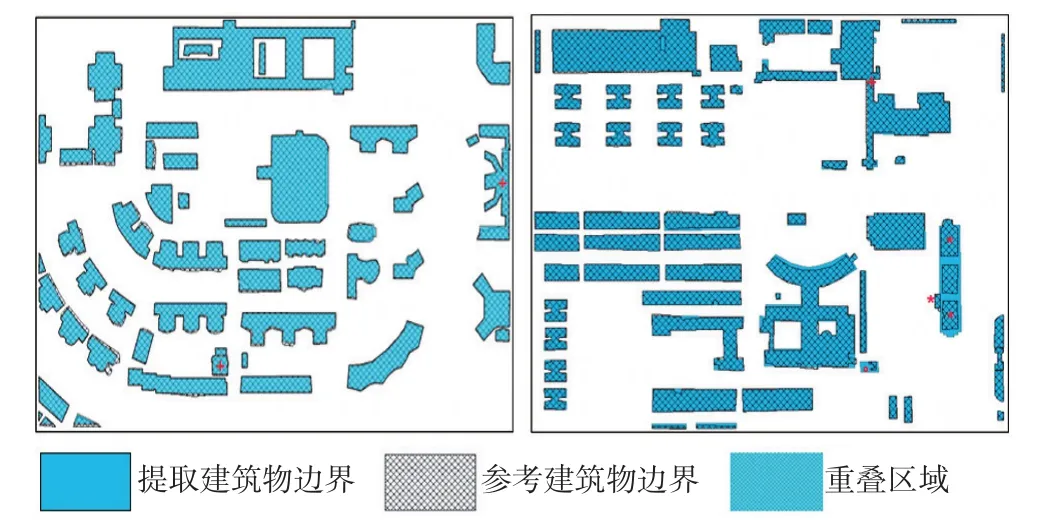
圖6 建筑物邊界提取結果與參考邊界的疊加
2.3 精度評價
為定量分析本文方法的精度,采用文獻[4]的評價策略進行了定量評估,評價因子為:
1)匹配度因子:選用土地利用分類評估參數Completeness(Comp)、Correctness(Corr)和Quality(Q)。
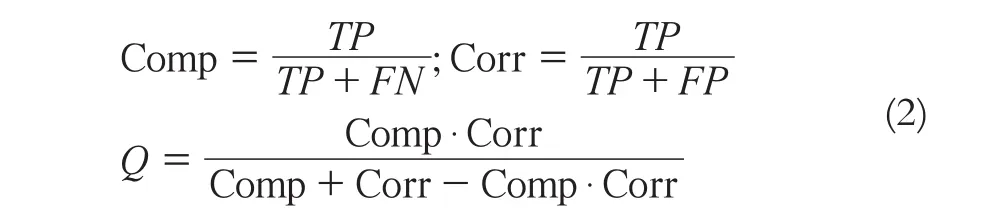
式中,TP為同屬于提取和參考數據的區域;FP為屬于提取數據的區域;FN為屬于參考數據的區域。
2)位置精度因子:選用參考數據與提取結果中建筑物中心點的距離差(Dd)。

式中,Xe、Ye為提取建筑物中心的坐標;Xr、Yr為參考建筑物中心的坐標。
表1顯示了A、B兩個區域的提取精度。單個建筑物的提取結果顯示了提取結果與參考數據較高的匹配度和位置精度;在整個區域的結果中,由于采用了較高的重疊度閾值To=90%,故得到了略低的精度,若取一般常用的70%重疊度,精度則會大大提高。圖7顯示了A、B兩區域中的Dd值,大多數建筑物顯示了較小的中心點差異,其中幾個超大值是由圖6中標注的建筑物分類錯誤引起的。以上各因子均表明本文方法在利用LiDAR點云進行建筑物邊界提取時可以取得較好的效果。
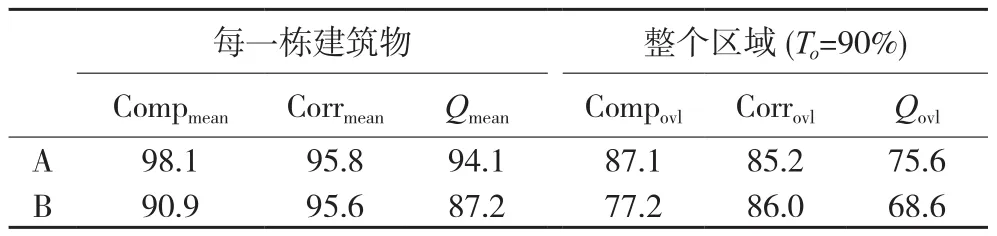
表 1 A、B兩區域的建筑物邊界提取精度/%
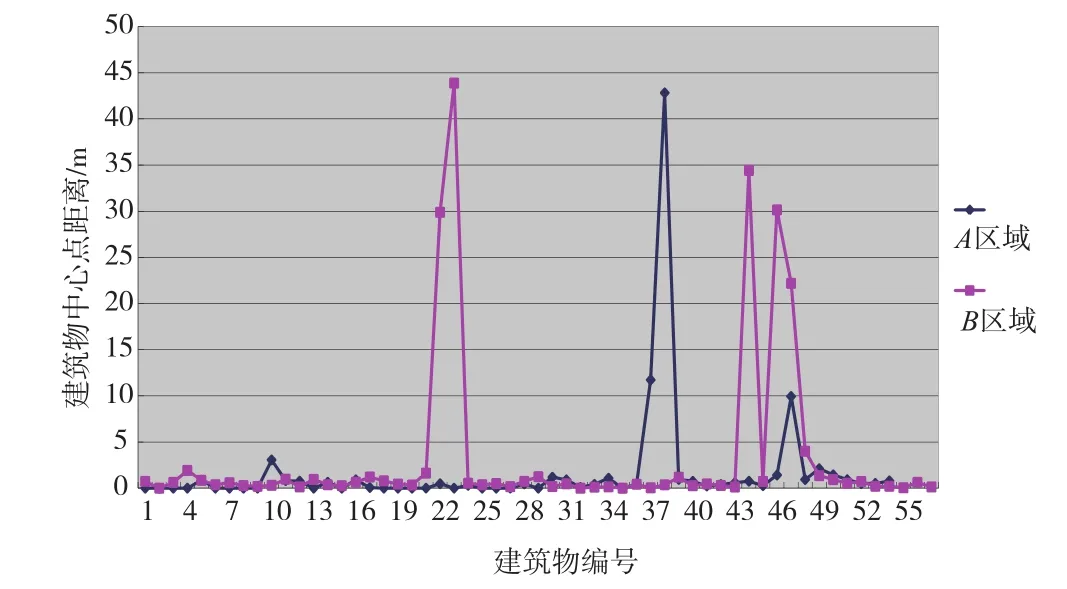
圖7 提取建筑物與參考建筑物中心點差距
3 結 語
本文提出了一種從分類后的建筑物點云中提取建筑物二維邊界的方法,包括建筑邊界點云提取及排序、建筑物邊界特征點提取和弧段擬合3個步驟。該方法無需假設建筑物主方向和形狀,并且適用于任意形狀的建筑物。建筑物邊界點云排序利用凸包算法,采用雙鄰域搜索,提高了排序速度;同時對弧段進行擬合,使建筑物邊界更貼合實際邊界,克服了LiDAR點云轉換為建筑物的鋸齒現象。
[1] Ozcan A H, Unsalan C, Reinartz P. A Probabilistic Approach to Building Change Detection[C]. 22nd Signal Processing and Communications Applications Conference (SIU), Trabzon,2014
[2] Sportouche H, Tupin F, Denise L. A Symmetric Scheme for Building Reconstruction from a Couple of HR Optical and SAR Data[C]. 2011 Joint Urban Remote Sensing Event (JURSE), Munich,2011
[3] Rutzinger M, Rottensteiner F, Pfeifer N. A Comparison of Evaluation Techniques for Building Extraction from Airborne Laser Scanning[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2009,2(1):11-20
[4] 孫穎,張新長,羅國瑋.從LiDAR點云提取建筑物邊界的活動輪廓模型改進方法[J].測繪學報,2014,43(6):620-626
[5] Seo S, Lee J, Kim Y. Extraction of Boundaries of Rooftop Fenced Buildings from Airborne Laser Scanning Data Using Rectangle Models[J].Geoscience and Remote Sensing Letters,2014,11(2):404-408
[6] Lee J, Han S, Byun Y, et al. Extraction and Regularization of Various Building Boundaries with Complex Shapes Utilizing Distribution Characteristics of Airborne LiDAR Points[J].ETRI Journal,2011,33(4):547-557
[7] 董保根.機載LiDAR點云與遙感影像融合的地物分類技術研究[D].鄭州:信息工程大學, 2013
[8] Awrangjeb M, Ravanbakhsh M, Fraser C. Automatic Detection of Residential Buildings Using LiDAR Data and Multispectral Imagery[J].ISPRS Journal of Photogrammetry and Remote Sensing,2010,65(5):457-467
[9] Jarvis R A. On the Identification of the Convex Hull of a Finite Set of Points in the Plane[J].Information Processing Letters,1973,2(1):18-21
[10] Douglas D H, Peucker T K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J].Cartographica:the International Journal for Geographic Information and Geovisualization,1973,10(2):112-122
P23
B
1672-4623(2016)07-0088-03
10.3969/j.issn.1672-4623.2016.07.028
趙小陽,高級工程師,注冊測繪師,主要研究方向為精密工程測量、城市測量和LiDAR數據處理。
2015-11-10。
項目來源:國家自然科學基金重點項目資助項目(41431178)。
猜你喜歡
兒童時代·幸福寶寶(2022年12期)2022-12-09 11:24:14
中學生數理化·七年級數學人教版(2022年11期)2022-02-14 07:14:12
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科普童話·學霸日記(2020年1期)2020-05-08 16:45:11
小天使·一年級語數英綜合(2019年2期)2019-01-10 11:57:30
兒童繪本(2018年5期)2018-04-12 16:45:32
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
