基于坡度和區(qū)域生長的城市LiDAR點(diǎn)云濾波方法
2016-12-26 08:21:19張寧寧楊英寶
地理空間信息 2016年3期
關(guān)鍵詞:區(qū)域
張寧寧,楊英寶,于 雙
(1.河海大學(xué) 地球科學(xué)與工程學(xué)院,江蘇 南京 210098)
基于坡度和區(qū)域生長的城市LiDAR點(diǎn)云濾波方法
張寧寧1,楊英寶1,于 雙1
(1.河海大學(xué) 地球科學(xué)與工程學(xué)院,江蘇 南京 210098)

在分析坡度濾波算法原理的基礎(chǔ)上,結(jié)合區(qū)域生長原理進(jìn)行改進(jìn);選取國際攝影測量與遙感學(xué)會提供的部分城市濾波樣本數(shù)據(jù)進(jìn)行實(shí)驗(yàn),將實(shí)驗(yàn)結(jié)果與Roggero坡度濾波算法和Sithole坡度濾波算法的結(jié)果進(jìn)行比較。結(jié)果表明,該方法能較好地降低一類誤差,對城市LiDAR點(diǎn)云建筑區(qū)數(shù)據(jù)有一定的適用性。
坡度;區(qū)域生長;LiDAR;濾波
點(diǎn)云濾波是LiDAR數(shù)據(jù)處理的首要任務(wù),主要目的是將點(diǎn)云分成地面點(diǎn)和非地面點(diǎn)[1],為后續(xù)道路、建筑物等地物點(diǎn)信息的提取打下基礎(chǔ)。其原理大致可分為2類:①根據(jù)激光腳點(diǎn)數(shù)據(jù)的回波強(qiáng)度信息進(jìn)行濾波。該類方法參考航空影像的分類原理,利用回波強(qiáng)度信息將LiDAR點(diǎn)云數(shù)據(jù)轉(zhuǎn)化為灰度圖像,通過分析灰度值的分布,確定出地面點(diǎn)的灰度范圍,從而將地面點(diǎn)從原始點(diǎn)云數(shù)據(jù)中過濾出來;在一定程度上發(fā)揮了點(diǎn)云數(shù)據(jù)自身的優(yōu)勢,但難以適用于大部分地形[2,3]。②基于高程突變信息進(jìn)行的濾波[4-10]。該類方法是目前絕大多數(shù)機(jī)載LiDAR數(shù)據(jù)濾波算法所采用的原理[1]。基于高程突變信息進(jìn)行濾波,首先是由Vosselman[4]提出的。該方法原理簡單、實(shí)現(xiàn)方便,因充分考慮到地形坡度問題,在地形平坦和坡度變化平緩的區(qū)域都有很強(qiáng)的適應(yīng)性[5,11,12]。但對于面積較大且相對較低的地物點(diǎn),其與最鄰近的地面點(diǎn)間的距離越大,高差閾值就會隨之增大,這些點(diǎn)被正確判為地物點(diǎn)的可能性就會降低。雖然經(jīng)Sithole改進(jìn)后的濾波算法能適應(yīng)陡坡地形,但在大型建筑物區(qū)和低矮植被區(qū)濾波結(jié)果仍存在問題[13]。此外,坡度濾波算法需要計算數(shù)據(jù)集中每個點(diǎn)的坡度,計算量大、速度慢。本文針對基于坡度濾波算法的缺點(diǎn),結(jié)合區(qū)域生長算法予以改進(jìn),快速準(zhǔn)確地分離了地物點(diǎn)和地面點(diǎn)。
1 基于坡度的濾波原理
基于坡度變化的濾波方法是通過比較兩點(diǎn)間的高差值是否滿足高差函數(shù)來判斷點(diǎn)是否為地面點(diǎn)。該方法認(rèn)為地形表面是一個平緩光滑的曲面,局部區(qū)域內(nèi)地形發(fā)生急劇變化的可能性較小,即相鄰兩點(diǎn)間的高差值超過一定的閾值[4]時,兩點(diǎn)間距離越小,高程值大的點(diǎn)屬于地面點(diǎn)的可能性就小。定義基于坡度的濾波算法的高差函數(shù)是一種基于兩點(diǎn)間高差值和距離值的濾波函數(shù),不僅表示了地形,還包括激光點(diǎn)的信息,可由預(yù)估的測區(qū)地形最大坡度百分?jǐn)?shù)及激光點(diǎn)的標(biāo)準(zhǔn)偏差確定。其公式為:

式中,S為最大地形坡度百分?jǐn)?shù);d為兩點(diǎn)間的水平距離;σz為標(biāo)準(zhǔn)偏差。最大距離dmax影響高差函數(shù)的值,Vosselman建議dmax設(shè)為10 m。
2 基于坡度和區(qū)域生長的濾波原理
對于離散機(jī)載LiDAR點(diǎn)云濾波而言,結(jié)合區(qū)域生長方法主要解決3個問題:地面種子點(diǎn)的正確選擇、地面點(diǎn)生長準(zhǔn)則的確定和停止迭代條件的判斷。本文在對原始點(diǎn)云進(jìn)行粗差剔除的基礎(chǔ)上,使用規(guī)則格網(wǎng)組織點(diǎn)云數(shù)據(jù)(如式(2)),不進(jìn)行插值;并以測區(qū)中最大建筑物的尺寸為濾波窗口大小對數(shù)據(jù)進(jìn)行劃分,選取濾波窗口中的最低點(diǎn)構(gòu)成地面種子點(diǎn)集,以種子點(diǎn)集中的種子點(diǎn)為中心進(jìn)行8鄰域搜索。判斷待定點(diǎn)與已知種子點(diǎn)的高差是否滿足高差函數(shù)閾值(如式(1));若滿足條件則該點(diǎn)被判為地面點(diǎn)的次數(shù)加1,并將其作為新的種子點(diǎn)進(jìn)行生長,直到?jīng)]有點(diǎn)滿足生長準(zhǔn)則即停止。最后統(tǒng)計每點(diǎn)被判為地面點(diǎn)的概率P,設(shè)定概率閾值實(shí)現(xiàn)地面點(diǎn)與非地面點(diǎn)之間的分類,減少分類誤差的產(chǎn)生。

式中,(X,Y)為網(wǎng)格號;(x,y)為點(diǎn)云的平面坐標(biāo);(xmin,ymin)為整個數(shù)據(jù)集的最小平面坐標(biāo);n為網(wǎng)格單元的大小。格網(wǎng)的大小由點(diǎn)密度決定,一般能保證每個單元格內(nèi)有1、2點(diǎn)即可。

式中,N為點(diǎn)被判為地面點(diǎn)的次數(shù);M為點(diǎn)被判斷的次數(shù)。引入一個限值a(0.1~0.5),當(dāng)P≤1-a時,則認(rèn)為該點(diǎn)原為地物點(diǎn),被誤判為地面點(diǎn),需要將其從地面點(diǎn)集中剔除。具體算法流程如圖1所示。

圖1 基于坡度和區(qū)域生長的算法流程圖
3 實(shí)驗(yàn)結(jié)果與分析
本文采用國際攝影測量與遙感學(xué)會(ISPRS)提供的專門用于濾波算法測試的樣本(樣本11~24)數(shù)據(jù)進(jìn)行實(shí)驗(yàn),實(shí)驗(yàn)采用統(tǒng)計3類誤差的定量評價方法分析濾波效果。3類誤差檢驗(yàn)是LiDAR點(diǎn)云數(shù)據(jù)濾波質(zhì)量評價中最常用的方法,可分為一類誤差(地面點(diǎn)錯分為地物點(diǎn)的誤差)、二類誤差(地物點(diǎn)錯分為地面點(diǎn)的誤差)和總誤差(對一類誤差和二類誤差的加權(quán)求和);一、二類誤差反映了算法的適應(yīng)性,總誤差則反映了算法的可行性。本文在適當(dāng)增加二類誤差的前提下,重點(diǎn)減少一類誤差;并與Roggero坡度濾波算法和Sithole坡度濾波算法進(jìn)行比較。該數(shù)據(jù)點(diǎn)間距為1.0~1.5 m,每m2約采樣0.67個點(diǎn),點(diǎn)云的高程誤差基本在0.2~0.3 m。該實(shí)驗(yàn)區(qū)屬于典型的城市區(qū)域,地面變化較為平緩,地物復(fù)雜,含有大型規(guī)則建筑物、不規(guī)則建筑物、道路橋梁和小型隧道等。圖2為各樣本誤差分布圖。圖3~5為本文算法與Roggero坡度濾波算法和Sithole坡度濾波算法對各樣本濾波后的3類誤差統(tǒng)計結(jié)果對比圖。

圖2 各樣本誤差分布圖
由圖2可知,基于坡度和區(qū)域生長的濾波算法能夠?yàn)V除多數(shù)的地物點(diǎn),特別是建筑物點(diǎn)(樣本12、樣本22、樣本23、樣本24),但對于橋梁(樣本21、樣本22)、汽車(樣本12)、低矮植被、陡坡植被(樣本11)等地物點(diǎn)的濾波效果仍不理想。另外,從樣本11和樣本24可知,在地形起伏地區(qū)基于坡度和區(qū)域生長的濾波結(jié)果存在較多的錯判點(diǎn),說明本文方法不能避免地形條件的影響。

圖3 一類誤差對比圖
由圖3可知,經(jīng)本文濾波算法濾波后,所有樣本的一類誤差較Roggero坡度濾波算法和Sithole坡度濾波算法的一類誤差都有所減少,即有更少的地面點(diǎn)被錯判為地物點(diǎn),說明本文改進(jìn)的濾波算法行之有效。例如,樣本12、樣本22、樣本23和樣本24都包含較多大型且結(jié)構(gòu)復(fù)雜建筑物,且這些建筑物點(diǎn)為樣本的主要地物點(diǎn),本文濾波算法都能將其很好地濾除。
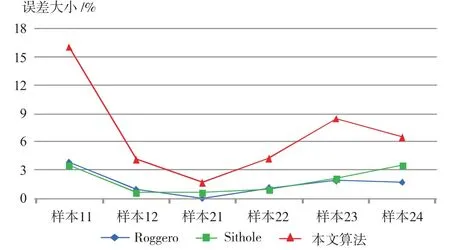
圖4 二類誤差對比圖
由圖4可知,經(jīng)本文濾波算法濾波后,所有樣本的二類誤差較Roggero坡度濾波算法和Sithole坡度濾波算法的二類誤差都有所增加,即有更多的地物點(diǎn)被錯判為地面點(diǎn)。這一方面是由于本文濾波算法是在適當(dāng)增加二類誤差的同時降低一類誤差,另一方面是由于本文濾波算法無法避免地形條件影響造成的。例如,樣本11地形陡峭、起伏大且場景較復(fù)雜,陡坡上的很多房屋點(diǎn)、植被點(diǎn)卻被誤判為地面點(diǎn)(圖2);對于樣本12和樣本23,本文濾波算法未能濾除其中很多的汽車點(diǎn)、低矮植被點(diǎn)(圖2);樣本21和樣本22所包含的附屬地物——橋梁也未能完全正確濾除。
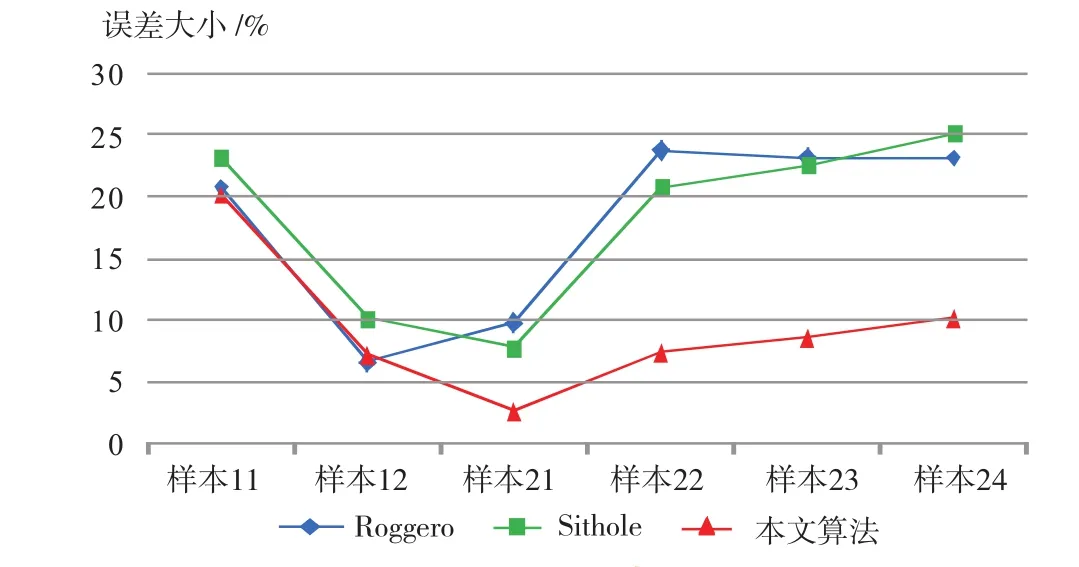
圖5 總誤差對比圖
由圖5可知,經(jīng)本文濾波算法濾波后,所有樣本的總誤差均近似等于或小于Roggero坡度濾波算法和Sithole坡度濾波算法的總誤差。這說明本文濾波算法用于城市點(diǎn)云數(shù)據(jù)濾波是可行的。
相較于其他兩種濾波算法,本文所述方法各樣本的一類誤差均減小,二類誤差均增大但在可控制的范圍內(nèi),總誤差近似等于或小于其他兩種算法的總誤差,說明本文濾波算法能正確選擇地面種子點(diǎn),通過區(qū)域生長算法得到準(zhǔn)確的數(shù)字地面模型,較好地保留了地形特征;同時能完整地濾除面積較大且結(jié)構(gòu)復(fù)雜的建筑物,但對于一些低矮植被、陡坡植被、汽車等地物點(diǎn)的濾波效果仍不理想,且受地形影響,適用于地形較為平坦的城市區(qū)域。
4 結(jié) 語
本文提出結(jié)合區(qū)域生長原理改進(jìn)基于坡度濾波算法,并通過選取ISPRS提供的部分城區(qū)樣本數(shù)據(jù)與Roggero坡度濾波算法和Sithole坡度濾波算法進(jìn)行對比實(shí)驗(yàn)。算法基于原始點(diǎn)云濾波,無需內(nèi)插或建立索引結(jié)構(gòu);在保證了數(shù)據(jù)原始精度的同時,每次只選取種子點(diǎn)8鄰域內(nèi)的點(diǎn)參與計算,減少了計算量,能快速實(shí)現(xiàn)點(diǎn)云數(shù)據(jù)濾波;對大型且結(jié)構(gòu)復(fù)雜的建筑物濾波效果明顯,適合一些比較平坦的城市區(qū)域。但是如何去除地形條件的影響,濾除低矮植被、陡坡植被、汽車等非地面點(diǎn),在保證一類誤差即地面點(diǎn)濾波精度的同時,降低二類誤差是本文需進(jìn)一步改進(jìn)的地方。
[1] 余潔,張國寧,秦昆,等. LiDAR數(shù)據(jù)的過濾方法探討[J].地理空間信息, 2006,4(4):8-10
[2] 張小紅.利用機(jī)載LiDAR兩次回波高程之差分類激光腳點(diǎn)[J].測繪科學(xué),2006,31(4): 48-50
[3] 許曉東,張小紅,程世來.航空LiDAR的多次回波探測方法及其在濾波中的應(yīng)用[J].武漢大學(xué)學(xué)報:信息科學(xué)版, 2007,32(11):1 011-1 015
[4] George Vosselman. Slope Based Filtering of Laser Altimetry Data[J].International Archives of Photogrammetry and Remote Sensing,2000,33(B3):935-942
[5] Sithole G. Filtering of Laser Altimetry Data Using a Slope Adaptive Filter[J]. International Archives of Photogrammetry and Remote Sensing, 2001,34(3-W4): 203-210
[6] Peter Axelsson. DEM Generation from Laser Scanner Data Using Adaptive TIN Models [J].International Archives of Photogrammetry and Remote Sensing, 2000, 33(B4):111-118
[7] 左志權(quán),張祖勛,張劍清,等.知識引導(dǎo)下的城區(qū)LiDAR點(diǎn)云高精度三角網(wǎng)漸進(jìn)濾波方法[J].測繪學(xué)報,2012,41(2):246-251
[8] 張小紅.機(jī)載激光掃描測高數(shù)據(jù)濾波及地物提取[D].武漢:武漢大學(xué),2002
[9] Kilian J, Haala N, Englich M. Capturing and Evaluation of Airborne Laser Scanner Data[J]. International Archives of Photogrammetry and Remote Sensing, 1996, 32(B3):383-388
[10] Hug C, Wehr A. Detecting and Identifying Topographic Objects in Imaging Laser Altimetry Data[J]. International Archives of Photogrammetry and Remote Sensing, 1997, 32(3-4W2):19-26
[11] Liu Xiaoye. Airborne LiDAR for Dem Generation: Some Critical Issues[J]. Progress in Physical Geography, 2008, 32:31-49
[12] George Sithole, George Vosselman. Experimental Comparison of Filter Algorithms for Bare-earth Extraction from Airborne Laser Scanning Point Clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2004, 59: 85-101
[13] Meng Xuelian, Currit Nate, Zhao Kaiguang. Ground Filtering Algorithms for Airborne LiDAR Data: a Review of Critical Issues[J]. Remote Sensing, 2010(2):833-860
P23
B
1672-4623(2016)03-0030-03
10.3969/j.issn.1672-4623.2016.03.010
張寧寧,碩士,主要研究方向?yàn)闄C(jī)載LiDAR點(diǎn)云數(shù)據(jù)處理。
2015-06-09。
項目來源:國家自然科學(xué)基金資助項目 (41271538)。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學(xué)學(xué)報(2015年3期)2015-12-10 03:49:15