基于基線長度約束的載波相位模糊度解算算法
2016-12-21 09:58:11徐博李昊王飛雪
全球定位系統 2016年5期
徐博,李昊,王飛雪
(1.國防科學技術大學 電子科學與工程學院,長沙 410073;2.中國人民解放軍94754部隊,嘉興 314013)
?
基于基線長度約束的載波相位模糊度解算算法
徐博1,李昊2,王飛雪1
(1.國防科學技術大學 電子科學與工程學院,長沙 410073;2.中國人民解放軍94754部隊,嘉興 314013)
載波相位模糊度固定是載波相位高精度定位技術中的關鍵問題。針對動態遮擋環境下載波相位模糊度固定成功率不高的問題,提出了一種利用已知基線長度作為約束條件,提高模糊度固定成功率的算法,仿真結果表明,在城市遮擋嚴重路段,模糊度固定成功率可從75.3%提高到89.0%,1.462 m基線長度條件下,定位誤差標準差小于1 cm.
載波相位;模糊度;定位解算
0 引言
載波相位差分高精度定位技術的關鍵是整周模糊度的固定。為了正確解算整周模糊度,傳統的GNSS載波相位動態測量,往往都是利用動態定位實施之前的靜態測量數據來確定整周模糊度,如靜態初始化法和天線交換法等。顯然上述方法難以適于動態定位需求。此外,即使可以在動態定位之前使用上述方法確定整周模糊度,但因動態環境的復雜性,失鎖和周跳在所難免。一旦出現失鎖和周跳,重新鎖定后的衛星其整周模糊度需要重新求解。為了實現連續而可靠的高精度GNSS動態定位,20世紀90年代中期國內外學者開始著手研究在動態定位過程中正確求解模糊度的方法,稱為整周模糊度的在航解算(Ambiguity Resolution On the Fly),簡稱為OTF法或AROF法[1]。在模糊度搜索算法中,業界普遍認為LAMBDA方法是目前搜索最快、最可靠,理論上相對最為嚴密的方法,圍繞LAMBDA法的研究也取得了較多成果[2-5]。但是在遮擋嚴重的區域,LAMBDA法仍然存在模糊度固定錯誤的問題。
針對上述問題,本文提出了利用已知基線長度輔助LAMBDA法提高模糊度固定成功率的方法,在此基礎上對載波相位差分定位精度進行了仿真分析。
1 基于偽衛星載波相位的差分定位算法
載波相位差分定位利用基準站和流動站觀測的載波相位測量值組成雙差觀測方程,求解基準站和流動站之間的三維基線矢量。由于基準站的位置是精確已知的,因此通過基線求解即可獲得流動站精確位置,算法數據處理流程如圖1所示。
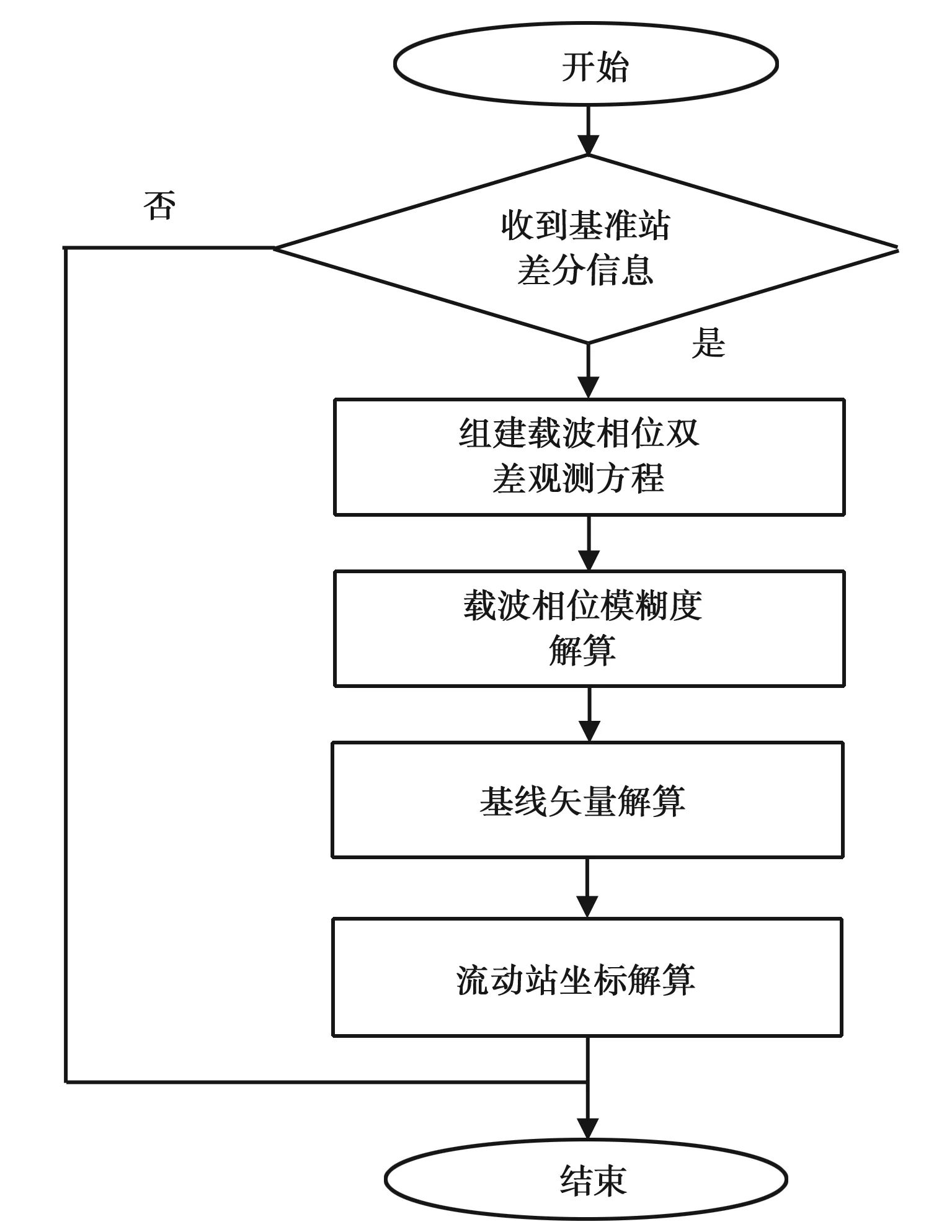
圖1 載波相位差分定位流程圖
對比偽距差分定位和載波相位差分定位處理流程可以看出,載波相位差分定位流程多了一步載波相位模糊度解算過程,模糊度解算也是載波相位差分定位中最為關鍵的問題。
載波相位雙差觀測方程與偽距雙差觀測方程類似,假設接收機U1接收到衛星S1的偽距觀測方程[5-6];
(1)
式中: S表示衛星; U表示接收機; φ表示測量到的載波相位,單位為m; P表示衛星與接收機間的真實距離,單位為m; da表示電離層延遲誤差,單位為m; dc表示對流程延遲誤差,單位為m; c表示光速,單位為m/s; dtU表示接收機鐘差,單位為s; dtS表示衛星鐘差,單位為s; N表示載波相位初始整周數,無單位; ε表示載波相位測量噪聲,單位為m.

利用接收機U1和U2觀測衛星S1的載波相位組成單差觀測方程:

(2)
載波相位單差操作同樣可以消掉與衛星有關的誤差。
同理可得到接收機U1和U2觀測衛星S2的單差觀測方程:

(3)
對兩個單差載波相位觀測方差做差,即可得到雙差載波相位觀測方程:

(4)
雙差操作后,與接收機有關的誤差也得到了消除。
與偽距差分定位方程類似,可以組建載波相位差分定位方程
(5)
上述方程的解算過程與偽距差分定位過程不同,由于載波相位模糊度N是未知的,因此上述方程無法直接解算,必須首先估計N,然后再解算基線矢量。
因此載波相位差分定位的解算步驟為:首先將N作為未知數進行浮點解解算,利用N的浮點解進行整數估計,得到N的整數解,將N的整數解帶入上述方程,即可求得基線矢量。
載波相位差分定位的浮點解解算方程為
(6)
將雙差偽距和雙差載波相位測量值共同組成浮點解解算方程,對上述方程進行最小二乘估計,得到基線矢量和N的浮點解。
利用N的浮點解估計N的整數解,帶入方程式(5)中,再對方程進行最小二乘估計即可得到基線矢量的精確解。
2 已知基線約束下的載波相位模糊度解算算法
載波相位整周模糊度估計的經典方法是LAMBDA法,該方法首先降低模糊度間的相關性,進而構造模糊度搜索空間,以誤差均方誤差最小為準則搜索模糊度整數解[6-8]。LAMBDA法是目前理論最為完備,應用最廣泛的模糊度解算方法。然而實際應用中,由于遮擋、干擾、大動態等特殊環境影響,LAMBDA法仍然會有一定的概率無法獲得正確的模糊度,因此本文提出了利用已知的基線長度來輔助判斷模糊度正確性的方法。
該方法需要已知兩個接收機之間的精確距離,在實際應用中,此條件是容易滿足的,對于兩個接收機天線固定不動的靜態或動態應用場合,都可以事先測出基線長度,基線長度約束下的模糊度搜索過程如圖2所示[9]。
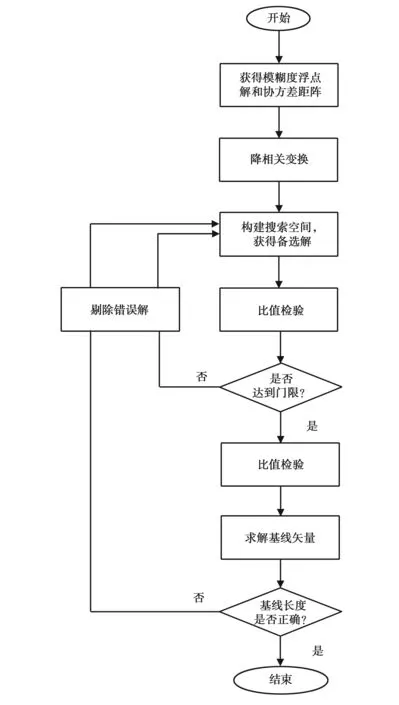
圖2 基于已知基線長度約束的模糊度搜索流程
為了方便表達,將第1節浮點解解算方程簡化表示為如下分塊矩陣形式:
(7)
式中: b表示基線未知矢量; a表示載波相位整周模糊度矢量。
對上式進行變換得到:
(8)
(9)
于是可得:

(10)
(11)
LAMBDA法構造的模糊度搜索空間為[5]:
(12)
搜索空間的大小由χ2決定。χ2的選擇直接影響模糊度搜索的性能。χ2過大則搜索空間太大,耗時較長;χ2過小則容易漏掉正確解,降低搜索成功率。
當各模糊度分量間相關性較強時,上述搜索空間將變形,嚴重影響搜索效率,因此首先需要降低各分量間的相關性。進行降相關變換的方法有Gauss變換、Z變換等多種方法[7],這里選用Z變換方法。
構造整數變換矩陣Z,構造方法參考[8],并進行如下變換:
(13)
(14)
對降相關變換后的矩陣進行搜索,搜索空間為
(15)
(16)
如果上述檢測量大于門限τ,則認為得到了最優搜索結果,將最優搜索結果進行Z的反變換,即可得到整周模糊度估計結果。
利用兩臺間隔固定的Novatel 617商用接收機進行實際測試,對617輸出的GPS L1、L2以及Glonass L1、L2四個頻點的原始觀測數據進行采集,采集時間為2016年4月21日下午15:00,采集地點為長沙市內各個預設路況場景。對采集數據利用本文算法進行解算,統計模糊度解算成功率,結果與617的RTK結果進行比較。模糊度解算成功率的統計方法為在需要重新解算模糊度時,解算正確模糊度而獲得固定解的數據點數除以總的數據點數。
在不同的基線長度以及場景下的試驗結果如表1所示,每個場景記錄1 h數據。
表1 不同條件下載波相位模糊度解算成功率統計
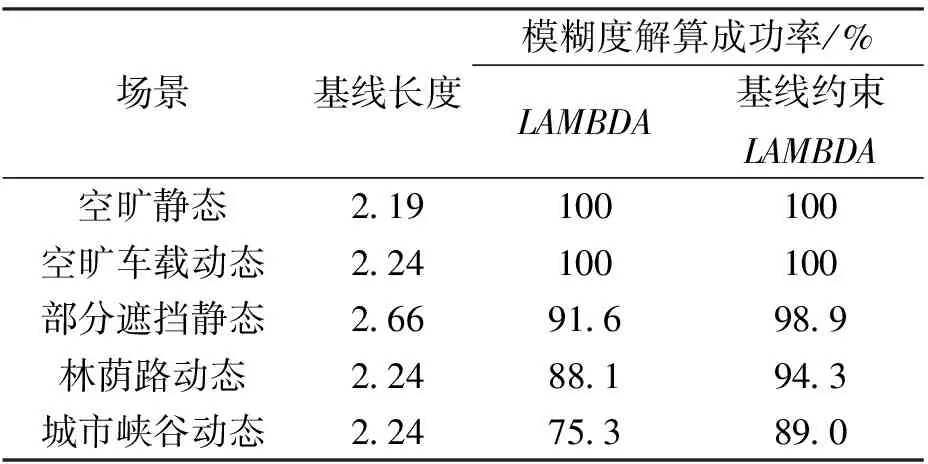
場景基線長度模糊度解算成功率/%LAMBDA基線約束LAMBDA空曠靜態219100100空曠車載動態224100100部分遮擋靜態266916989林蔭路動態224881943城市峽谷動態224753890
由上述幾個場景的測試結果可知,增加了基線約束后,在一些特殊場合LAMBDA法解算成功率不高時,本文提出的基線長度約束LAMBDA法可以有效提高模糊度搜索的成功率。需要注意的是,本文方法提高搜索成功率由上述幾個場景的測試結果可知,增加了基線約束后,在一些特殊場合LAMBDA法解算成功率不高時,本文提出的基線長度約束LAMBDA法可以有效提高模糊度搜索的成功率。
3 載波相位差分定位精度分析
用安捷倫信號采集回放設備錄制實際對天信號,用軟件接收機進行信號接收和數據處理,用Novatel617同時進行解算,得到標準解算位置,用于與本文算法處理結果進行比對。數據采集時間為2 h.在軟件接收機中進行載波相位差分定位解算,對2 h數據進行處理。
北斗B1頻點1號星和2號星間的載波相位雙差測量值如圖3(基線長度1.462 m)所示。
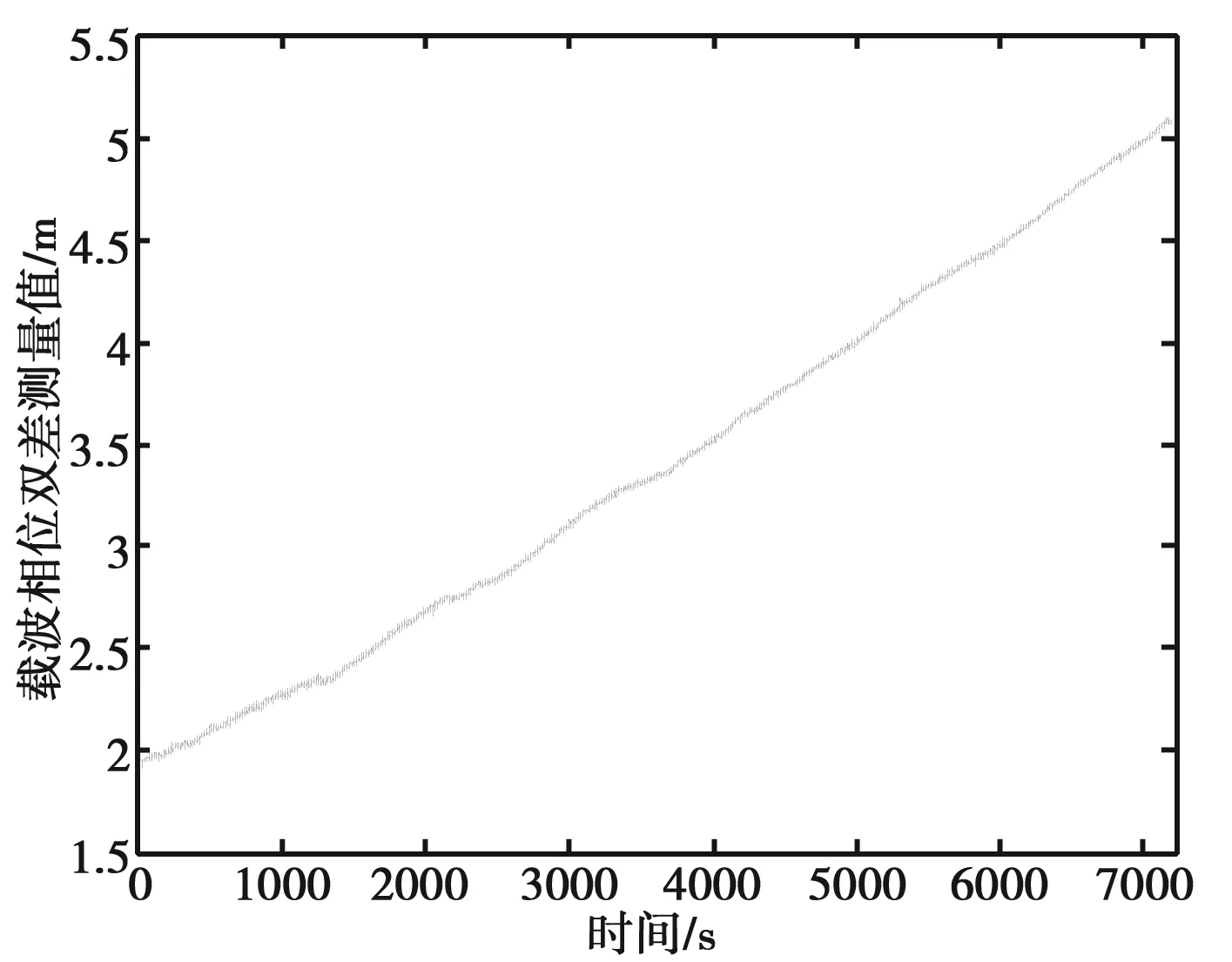
圖3 載波相位雙差觀測值
可見載波相位測量值比較平滑。由于不是零基線測量,因此載波相位測量值并不具備常數特性。
將東北天坐標系下算法解算結果與617解算結果做差,統計誤差RMS,由于天向誤差普遍大于東向和北向誤差,因此這里只給出天向誤差統計結果。圖4示出了測試時間段內本文算法得到的天向定位結果與617定位結果的差值,可見,定位誤差波動在3 cm以內。經過統計分析,天向誤差RMS為8 mm,達到了厘米級定位精度的要求。
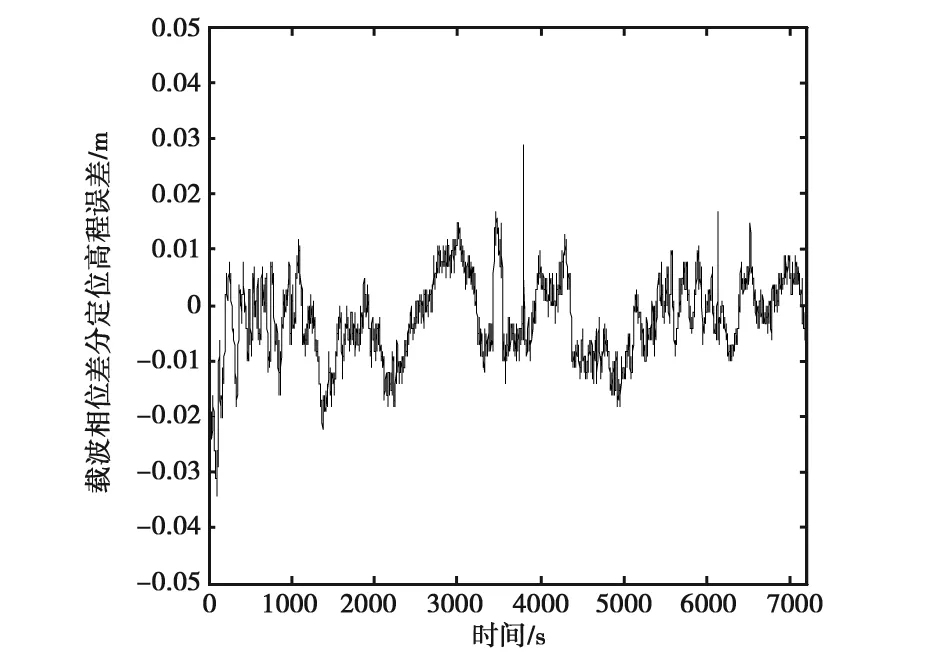
圖4 載波相位差分定位精度
4 結束語
本文討論了GNSS高精度定位的核心問題模糊度解算。針對異常條件下載波相位差分定位模糊度固定成功率降低的問題,提出了基于已知基線約束的載波相位模糊度解算方法,提高了遮擋環境下的模糊度解算成功率,可滿足厘米級高精度定位需求。
[1] TEUNISSEN P J G. The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation[J]. Journal of Geodesy, 1995, 70(2): 65-82.
[2] 楊東森, 呂志偉,王兵浩,等. 北斗三頻數據模糊度解算方法比較分析[J]. 全球定位系統,2016,41(3): 11-15.
[3] TEUNISSEN P J G, GIORGI G. Carrier phase GNSS attitude determination with the Multivariate Constrained LAMBDA method[C]//Proceedings of Aerospace Conference 2010, Big Sky, MT, 2010:1-12.
[4] ZHANG X H, HE X Y. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations[J]. GPS Solutions, 2016, 20(2): 269-281.
[5] 程建華,王晶,晏亮,等. 高維情況下雙差整周模糊度LAMBDA法解算分析[J]. 哈爾濱工程大學學報,2012,33(4):470-475.
[6] 劉鋒,蘭孝奇,陳飛. 基于LAMBDA整周模糊度解算方法中的整數Z變換算法[J]. 測繪與空間地理信息,2014,37(4):51-54.
[7] 盧立果,劉萬科,李江衛. 降相關對模糊度解算中搜索效率的影響分析[J]. 測繪學報,2015,44(5): 481-487.
[8] 趙興旺,王慶,潘樹國,等. LAMBDA算法的部分模糊度固定及性能分析[J]. 中國慣性技術學報,2010,18(6): 665-669.
[9] 李豹,許江寧,曹可勁,等. 改進LAMBDA算法實現單頻GPS整周模糊度快速解算[J]. 中國慣性技術學報,2013,21(3): 365-368.
Ambiguity Resolution of Carrier Phase With Baseline Length Constraint
XU Bo1,LI Hao2,WANG Feixue1
(1.CollegeofElectronicScienceandEngineering,NationalUniversityofDefenseTechnology,Changsha410073,China;2.Army94754Unit,Jiaxing314013,China)
Ambiguity resolution is the key problem in high-precision positioning technology. For the problem of low success rate of ambiguity resolution in challenged environment, a modified ambiguity resolution algorithm is proposed. The algorithm is able to increase the success rate of ambiguity resolution by using baseline length constraint. The simulation results show that the success rate can be increased from 75.3% to 89% in some challenge environment, and the positioning error is less than 1cm under the condition of 1.462m baseline.
Carrier phase; ambiguity; positioning algorithm
10.13442/j.gnss.1008-9268.2016.05.013
2016-04-10
國家自然科學基金(批準號:61403413)
TP391.41
A
1008-9268(2016)05-0066-05
徐博 (1982-),男,碩士,講師,主要從事衛星導航專業。
李昊 (1984-),男,碩士,主要從事衛星導航部隊應用。
王飛雪 (1972-),男,教授,博導,主要從事衛星導航專業。
聯系人: 徐博 E-mail: 48193077@qq.com
