利用高頻GNSS數據提取地震波信號方法研究
2016-12-21 10:01:24李新星林劍陳正松
全球定位系統 2016年5期
關鍵詞:方向
李新星,林劍,陳正松
(中國地震局地震研究所,武漢 430071)
?
利用高頻GNSS數據提取地震波信號方法研究
李新星,林劍,陳正松
(中國地震局地震研究所,武漢 430071)
本文就如何利用高頻GNSS數據提取地震波信號進行討論,選取2011年3月11日日本9.0級地震前后日本境內及周邊IGS基準站的高頻GNSS數據作為研究對象,首先用TRACK軟件對觀測站的GNSS數據進行解算,獲得相應的位移時間序列,然后利用恒星日濾波算法對所得到的位移時間序列進行去噪,進而獲得高精度地震位移波動信號,結果表明,高頻GNSS對地震監測是一種有益的補充,對于拓展地震波獲取方法以及更深入研究地震信息具有重要意義。
高頻GNSS;TRACK;恒星日濾波;地震波
0 引 言
GNSS等空間大地測量觀測技術的發展為傳統的大地測量學帶來了深刻的變化。隨著高頻GNSS接收機的出現,GNSS接收機在地震學方面起到越來越重要的作用。連續觀測的高頻GNSS接收機,結合高速通訊傳輸和高效率的GNSS數據處理軟件,使得高頻GNSS接收機已逐漸成為實時監測地殼運動的一種手段。現階段,國內外的一些GNSS觀測網絡已經進行了更新和升級,1 Hz實時GNSS定位精度可達亞厘米級[1]。實現利用高頻GNSS數據提取地震波信號能夠拓展地震波獲取方法并深入研究地震。與此同時,國內外研制出了很多優秀的數據處理軟件,包括GAMIT、BERNESE、GIPSY、PANDA軟件等。利用GAMIT軟件的TRACK模塊能夠解算出GNSS測站記錄到的地震動態位移和靜態位移特征[2]。本文采用GAMIT軟件的TRACK模塊處理1 Hz GNSS數據。
1 GAMIT軟件簡介
GAMIT是GNSS數據后處理與分析軟件,TRACK是GAMIT的一個動態定位模塊,其定位結果可得到測站每個歷元的三維坐標差及單位權中誤差,獲得移動測站的運動軌跡。在使用GAMIT軟件進行GNSS數據處理前,需將GNSS接收機觀測數據整理成符合需要的文件格式。GAMIT可以對大型而復雜的數據進行處理。利用GAMIT解算軟件進行精密定位計算,可以獲取高頻GNSS地震位移信息。通過TRACK軟件,可獲得高精度的動態定位結果。
2 震時高頻GNSS數據解算與分析
2.1 高頻GNSS數據解算準備
選取2011年3月11日(年積日070)日本9.0級地震前后日本境內及周邊IGS基準站的高頻GNSS數據作為研究對象,利用TRACK解算高頻GNSS數據,用長基線雙差精密定位技術,獲取2011年3月11日日本9.0級地震近場和遠場GNSS連續參考站的瞬時動態位移。
實驗所用到的觀測站包括MIZU,USUD,SHAO,PETS,PIMO等站,站點具體信息[3]如表1所示。最終需要的數據有MIZU,USUD,SHAO,PETS,PIMO等站上2011年3月11日5:15到6:45的觀測數據,和GNSS周為1626的精密星歷數據。2011年3月11日的觀測數據是由法國巴黎的國家地理研究所(IGN)提供的。
TRACK利用一個后綴名為.cmd的命令控制文件來設置各項參數,通過在該文件中添加一系列特定的命令來定義解算時的參數值[4]。它注釋著這組文件的特定說明,由人工生成。在解算時,還需要觀測數據文件(.o文件)和衛星精密星歷文件(.sp3文件)。
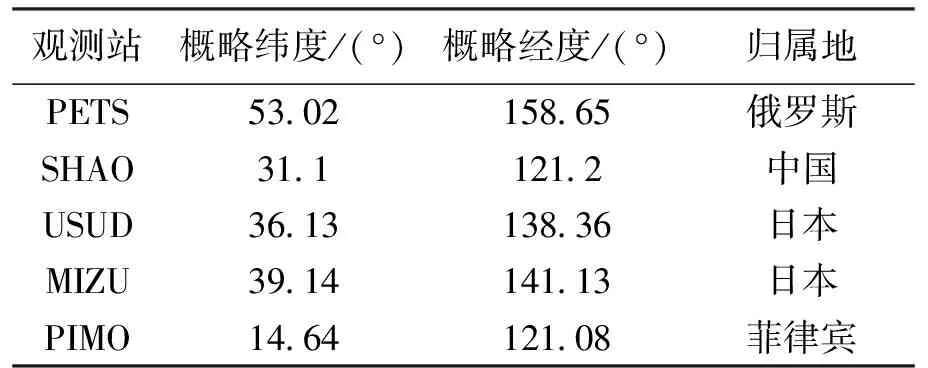
表1 觀測站信息列表
2.2 高頻數據解算與結果分析
用TRACK軟件解算高頻GNSS數據的命令為track-f track.cmd -d 070 -w 16265>! TRAK_070.out.-f后面為控制文件名,-d后面為年積日,-w后面為GNSS周,>!后面為輸出文件名。
運行結果所得到的文件為:結果文件TRAK070.sum,它包含了從TRACK得出的主要質量結果,其中包括運行參數、偏差參數、處理狀態和相位殘差統計。各站點的位置估計文件TRAK070.NEU.mizu.LC;TRAK070.NEU.pets.LC;TRAK070.NEU.shao.LC;TRAK070.NEU.usud.LC和站點在各星歷的相位殘差數據文件。其中主要用到的文件是各站點的位置估計文件。
利用2011年3月11日5:15-6:45(UTC)的高頻GNSS數據,以PETS站和SHAO站為基準站,計算出USUD站和MIZU站的北東高三個方向的動態位移時間序列,如圖1~圖4所示。從圖1和圖2可以看出,地震發生前這兩個站基本保持穩定。USUD站在地震發生時三個方向均發生明顯位移:在東西方向上,地震發生時向東運動;在南北方向上,地震發生時先向北運動,再向南運動,又向北運動,最后南北方向上運動位移基本抵消;在上下方向上,震前先是平穩的,震時先上后下,震后又趨于平穩。從圖1可以看出此站地震持續時間近220 s.從圖3可以看出,USUD站在地震發生過程中呈現出圈形運動。MIZU站在地震發生時也有明顯位移:在東西方向上,地震發生時向東運動后又有小幅度反彈;在南北方向上,地震發生時向南運動后也有小幅度反彈;對于上下方向,震前先是平穩的,震時先上后下,震后又趨于平穩。從圖2可以看出地震持續近160 s.比較圖1、圖2可以看出MIZU站發震時刻相對更早,相對振幅更大。從圖3可以看出,USUD站總體表現為向東運動。從圖4可以看出,MIZU站總體為向東南方向運動。
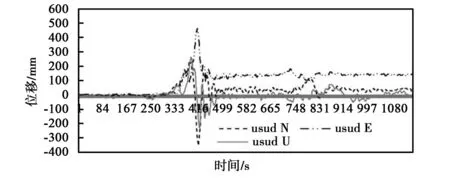
圖1 地震時1 Hz GNSS站USUD N、E、U方向的動態位移
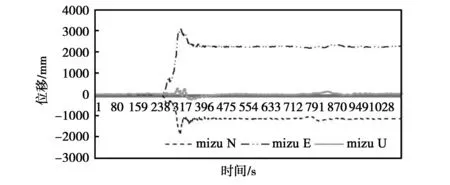
圖2 地震時1 Hz GNSS站MIZU N、E、U方向的動態位移
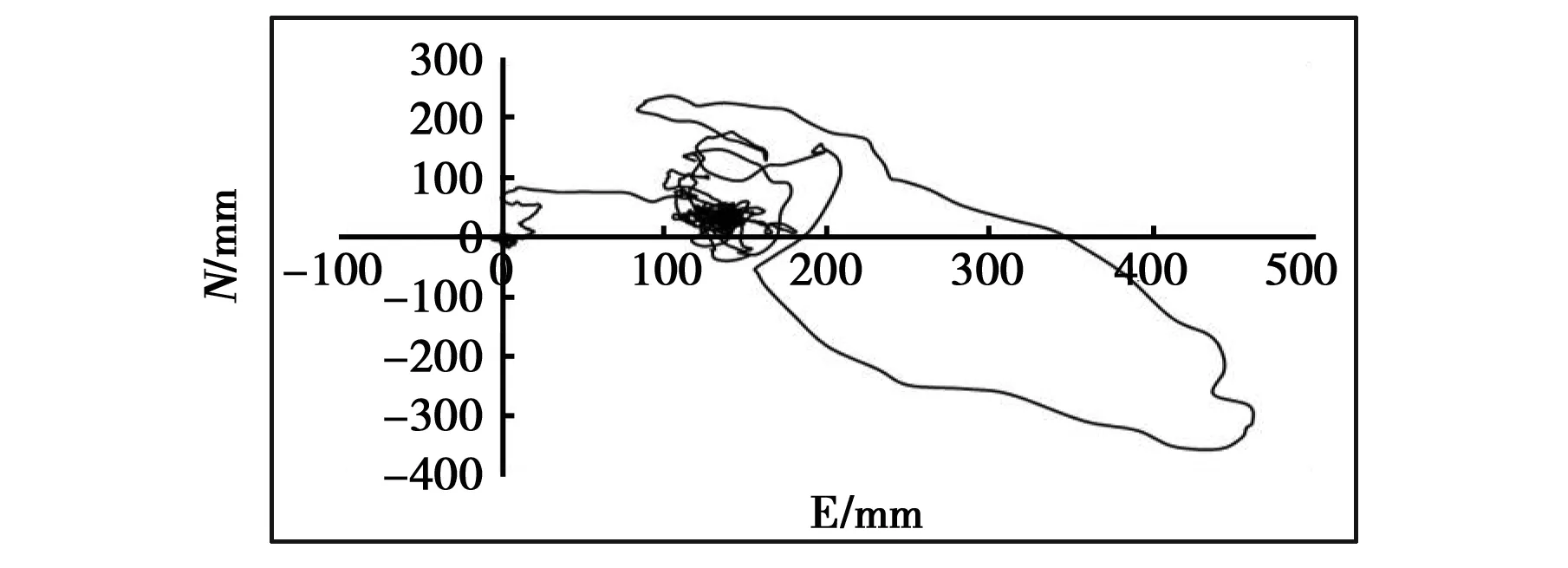
圖3 地震期間USUD站水平運動軌跡
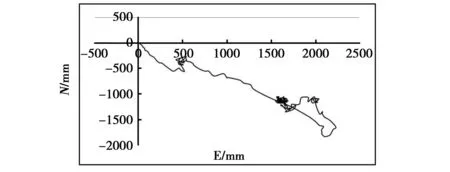
圖4 地震期間MIZU站水平運動軌跡
3 基準站選取原則的確定
IGS基準站的選擇在高精度GNSS數據處理中至關重要,選擇適當與否,對平差結果的影響是系統性的[5]。近年來IGS基準站的選取是高精度GNSS數據處理中討論的熱點問題,但迄今為止,該問題仍然沒有得到完全解決。
3.1 IGS站選取的意義
作為基準站,首先要保證自身的穩定性,所以基準站不應該受到地震影響,要遠離震中[6]。IGS基準站選取的位置分布不同,將產生不同的平差結果。基準站的選取除從幾何上考慮外,還應有足夠的數量,以獲得所需的統計強度[7],即基準站的精度與所選IGS基準站的位置和數目有關。
3.2 確定基準站選取原則的方案設計
通過實例選取不同位置、不同數量的IGS基準站。利用TRACK軟件解算2011年3月11日高頻GNSS數據,并結合理論分析得出確定基準站選取原則,方案設計如表2所示。

表2 確定基準站選取原則的方案設計
3.3 基準站選取原則的確定
六種方案的監測站均用到USUD站,對六種方案USUD站的解算結果進行精度對比,如圖5所示,為了圖像的可讀性,僅取部分數據進行作圖),可以發現解算精度和精度的穩定程度由高到低依次為:方案五、方案三、方案一、方案四、方案三、方案六。除了方案六精度較差,其余方案精度基本達到亞厘米級。
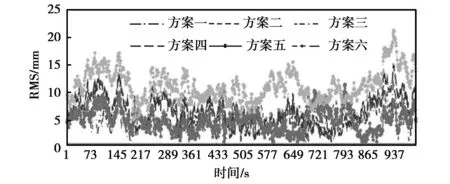
圖5 六種方案精度對比
根據實驗結果可以發現方案五的RMS值基本穩定在5 mm左右,且RMS的上下波動較小。方案五的解算結果是很理想的。其解算的RMS值和RMS的穩定度均比其他幾種方案解算的好,說明用兩個基準站解算的效果要優于單個基準站解算。和方案五相比,方案六的基準站和監測站的個數均相同,唯一不同的是方案五中的一個基準站PIMO在方案六中變換為SHAO。方案六解算結果的精度卻出現明顯的較大幅度的波動且RMS高達6 cm.方案六中PETS站和SHAO站基本位于以震源為中心2 000 km為半徑的圓上,而且PETS站、震源和SHAO站這三點基本位于一條直線上,推測這是其解算精度比較差的主要原因。方案一、方案二和方案四進行比較,其基準站均為PETS.方案二在方案一的基礎上加入監測站MIZU,方案四在方案二的基礎上加入監測站SHAO.方案一和方案二的精度均較好,沒有明顯差異。在方案四中,以PETS為基準站解算USUD站、MIZU站和SHAO站,發現添加SHAO站之后解算的RMS值有所增加。出現這種現象,推測與PETS站和SHAO站之間的距離較長有關。所以,在解算過程中盡量不要選擇過長的基線進行解算。結合理論和實驗分析,可以得出基準站選取的原則為:
1) 利用TRACK進行數據解算過程中,可以選擇兩個基準站,這樣可以在一定程度上提高定位精度;
2) 兩個基準站和觀測站不要在一條直線上,而應盡量構成正三角形;
3) 基準站要遠離震中,但基線長度也不要過長。
4 高頻GNSS位移信號噪聲處理
經過TRACK軟件處理的結果還存在一定的誤差。為進一步提高 GNSS 動態時序的精度,獲得更優的定位結果,需要削弱定位結果中殘留的誤差[8]。
4.1 恒星日濾波法簡介
GNSS衛星分布在6個軌道面上,設計的衛星運行周期為半個恒星日,約11小時58分,運行2周的時間為一個恒星日(23 h 56 m 4 s)。在一個恒星日內,GNSS衛星軌道運行2周,地球自轉一周,衛星幾何結構與前一個恒星日恰好相同。利用衛星軌道的恒星日重復性,可以降低由衛星軌道以及接收機環境引起的誤差[9]。恒星日濾波法就是利用誤差的恒星日重復性,通過濾波技術來降低與測站環境有關的周期性誤差影響。
4.2 恒星日濾波原理
恒星日濾波利用了多路徑效應和其他一些誤差周期性的特點來消除或削弱對定位精度的影響。恒星日濾波的計算步驟為
1) 獲取恒星日濾波的周期;
2) 對前兩天(年積日068,069兩天)1 Hz GNSS數據用TRACK軟件進行處理;
3) 對前兩天的結果進行噪聲計算,并取其平均值;
4) 將前兩天的誤差改正到當天(年積日070)的處理結果上。
4.3 恒星日濾波處理結果
運行恒星日濾波程序,對監測站USUD站和MIZU站的N、E、U三個方向均做了濾波處理。對濾波前后兩個站U方向進行數據處理,得到圖6,圖7所示結果。
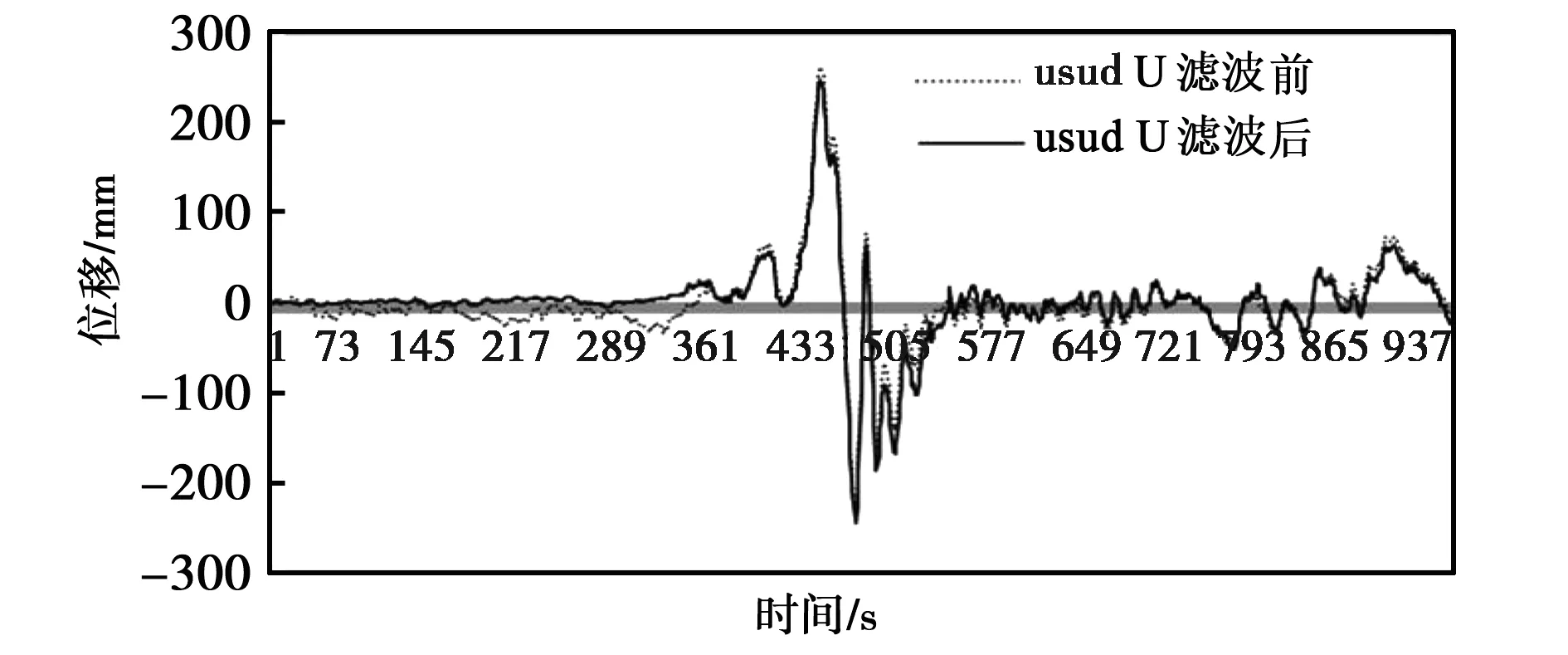
圖6 地震時1 Hz GNSS站USUD U方向的動態位移
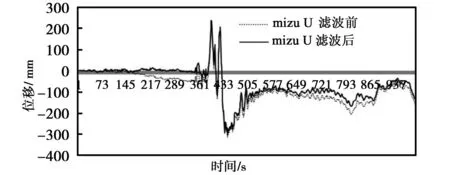
圖7 地震時1 Hz GNSS站MIZU U方向的動態位移
采用恒星日濾波方法對USUD、MIZU站N、E、U三個方向的動態時序分別進行濾波處理,結果表明,地震引起的GNSS站USUD、MIZU站N、E、U三個方向的動態位移普遍變得更穩定,尤其是在U方向這種穩定性更為明顯。取地震前數據分別計算濾波前后的均方根誤差(RMS),其中USUD站南北向動態時序離散度RMS由0.26 cm降低至0.25 cm,USUD站東西向RMS由0.15 cm變為0.26 cm,USUD站上下向RMS由0.94 cm降低至0.79 cm;MIZU站南北向RMS由0.69 cm降低至0.28 cm,MIZU站東西向RMS由0.32 cm降低至0.25 cm,MIZU站上下向RMS由1.04
cm降低至0.62 cm.濾波前各站的三個方向的RMS值比較散亂,而濾波后,U方向RMS值基本為N、E方向RMS值的二倍,這與GNSS的精度也很吻合。這說明恒星日濾波法可以削弱定位結果中殘留的誤差,有效地降低噪聲,進一步提高GNSS動態時序的精度,獲得更優的定位結果。
5 結束語
本文主要討論了用TRACK軟件解算高頻GNSS數據時,基準站選取原則的確定,對解算數據用恒星日濾波法去噪等內容,并且實際處理了USUD、MIZU站高頻GNSS數據,獲取這兩個站在日本9.0級地震時的高精度位移時間序列,實現了利用高頻GNSS數據提取地震波信號。這對于拓展地震波獲取方法以及更深入研究地震具有重要意義。
但是在高頻GNSS數據解算結果精度的進一步提高方面,尚待深入研究。如:引入S-變換去噪方法作后續處理,可能進一步提高最終解算結果的精度。
[1] 殷海濤,劉希強,甘衛軍.實時高頻GPS在地震學中的應用研究[J]. 地震研究. 2013,36(3):330-337.
[2] 蘇小寧,孟國杰,胡從瑋,等.基于Track進行GPS單歷元定位[J].大地測量與地球動力學,2009,29(3):100-103.
[3] 高淑照,陳強.國際高頻GNSS數據共享時空分布分析[J].大地測量與地球動力學,2013,33(4):155-160.
[4] 鄂棟臣,詹必偉,姜衛平,等.應用GAMIT/GLOBK軟件進行高精度GPS數據處理[J].極地研究,2005,17(3):173-182.
[5] 隋立芬,許其鳳.GPS數據處理中IGS基準站的選取[J].測繪學院學報,2003,20(1):1-3.
[6] 熊永良,黃丁發,徐韶光.長距離動態GNSS數據處理方法與汶川地震引起的動態地殼形變特征分析[J].武漢大學學報(信息科學版),2010(3):265-269.
[7] 隋立芬,許其鳳.GPS數據處理中IGS基準站的選取[J].測繪學院學報,2003,20(1):1-3.
[8] KOUBA J. Measuring seismic waves induced by large earthquake with GNSS[J]. Studia Geophysica et Geodaetic,2003(47):741-755.
[9] 方榮新.高采樣率GPS數據非差精密處理方法及其在地震學中的應用研究[D].武漢:武漢大學測繪學院,2010.
The Method Study About Extracting the Seismic Wave Signal with High Frequency GNSS Date
LI Xinxing,LIN Jian,CHEN Zhengsong
(InstituteofGeology,ChinaEarthquakeAdministration,Wuhan430071,China)
In this paper, how to realize the use of high frequency GNSS data to extract the seismic wave signal is discussed. We choose the high frequency GNSS data about the IGS reference stations before and after the Tohoku-oki M9.0 earthquake on Mar.11,2011 in Japan and its surrounding as the research object. First of all, we need to use the GNSS observation data with TRACK software to get the corresponding displacement time series. Then deal with the noise of the displacement time series with sidereal filtering algorithm, then we will get the displacement signal, which is a meaningful supplement for deformation monitoring. Using the high frequency GNSS data to extract the seismic wave signal will expand the seismic acquisition method and further research in earthquake and it will be of great significance.
High-efficiency GNSS; TRACK; sidereal filtering; seismic wave
10.13442/j.gnss.1008-9268.2016.05.015
2016-05-31
P228.4
A
1008-9268(2016)05-0075-05
李新星 (1988-),男,碩士生,研究方向為GNSS技術與應用。
林劍 (1975-),男,博士,副研究員,研究方向為GNSS數據處理,GNSS電離層觀測技術及其在地震中的應用。
陳正松 (1983-),男,碩士,主要研究方向為GPS在地表變形中的應用。
聯系人: 李新星 E-mail: lixinxing_wh@163.com
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
