一種仿生蛇形機器人的結構設計
2016-12-20 11:01:54聶宇,張琢,林蕓
現代機械 2016年6期
關鍵詞:結構
聶 宇,張 琢,林 蕓
(貴陽學院機械工程學院,貴州貴陽550005)
?
一種仿生蛇形機器人的結構設計
聶 宇,張 琢,林 蕓
(貴陽學院機械工程學院,貴州貴陽550005)
蛇形機器人能夠在復雜的環境中運動。通過對蛇的身體結構、運動特點進行分析,對其骨架進行仿真抽象,設計了一種采用行星齒輪差動結構且具有三自由度的仿生蛇形機器人。此種結構蛇形機器人利用舵機以不同速率轉動驅動行星齒輪差動耦合可實現俯仰、偏航、回轉等運動,配備以傳感器感知外界環境,具備驅動能力強、傳動精度高等優點。通過UG建立了相應的虛擬樣機并分析得出了臨界轉角等技術參數。
蛇形機器人 結構設計 骨架抽象 行星齒輪差動結構
0 引言
蛇是世界上無四肢動物中最龐大的一類,分布在世界上除北極、南極外的各個地方。蛇的身體具有低重心、高冗余度、高魯棒性、多自由度、良好的穩定性等特點,具有復雜多變的運動方式。仿生蛇形機器人是一種在運動機理上高度模仿蛇的新型機器人,其主要靠蛇體和地面之間的摩擦力作用來驅動蛇體的運動,而不需要額外的驅動輪、動力源或牽引車來帶動蛇體運動。仿生蛇形機器人可以應用于戰爭偵查、管道疏通、傷員搜救、醫療、航天等領域。
國外蛇形機器人研究技術較為成熟。日本東京工業大學的Shiego Hirose研制出可以在地面實現蜿蜒曲線運動的ACM系列蛇形機器人樣機[1-2];德國GMD 實驗室研制出了共六個模塊,有水平方向和豎直方向兩個自由度,從而可以實現三維空間運動的GMD -Snake1[3]。國內蛇形機器人技術起步較晚,但發展十分迅速。上海交通大學的顏國正、崔顯世研制了我國第一條蛇形機器人樣機[4];中科院沈陽自動化研究所已研制出兩代功能樣機,其第一代功能樣機采用模塊化設計,每個模塊具有2自由度[5];第二代功能樣機巡視者Ⅱ具有三自由度[6]。國內還有哈爾濱工業大學、華南理工大學等先后投入到對蛇形機器人的研究[7-8]。
1 蛇形機器人的整體方案
在設計之初需對蛇形機器人進行整體方案設計(圖1):首先,對生物蛇進行身體結構分析,了解其運動方式、運動特點。其次,通過對常用結構設計方案進行比較,設計出合理高效的單元模塊機械結構。再次,選擇合適的驅動方案,選取好舵機并采用模塊化的設計方式簡化設計過程,節約成本也便于維護。最后,對蛇形機器人進行總體設計,得出相應的蛇形機器人技術參數。
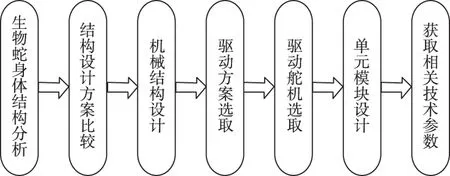
圖1 整體設計方案簡圖
1.1 蛇形機器人的組成結構
仿生蛇形機器人由蛇頭、蛇身、蛇尾三個部分組成。蛇身部分是蛇形機器人的主體結構,它由多個單元模塊串聯而成,起到保護機體、傳遞運動的作用;蛇頭部分功能為感知外界環境,安裝有觸覺傳感器、距離傳感器、力覺傳感器;蛇尾部分安裝有電池提供動力源。
1.2 生物蛇的身體結構分析
蛇的運動方式極其獨特,主要靠蛇體的腹部與地面之間的摩擦產生前行的動力,其運動方式多種多樣。蛇的運動方式是由蛇的身體結構所決定的,蛇沒有四肢,全身被鱗片所覆蓋,其身體細長,蛇身分為蛇頭、蛇身和蛇尾三個部分,其中軀干部分有多達200-400塊脊椎骨,這些脊椎骨前后相連。其中前脊椎骨具有球形凹陷,后脊椎骨具有球形突起,前后脊椎骨形成了一種類似于球形鉸鏈關節的結構(圖2)[9]。通過球形鉸鏈關節周圍肌肉的收縮,關節間產生的相對的轉動。在機械領域內,我們可以使用球鉸副來代替球形鉸鏈實現此種運動(圖3)[10]。將生物蛇的骨架模型簡單地抽象為一系列由球形鉸鏈連接的桿件組成的簡單模型(圖4)。
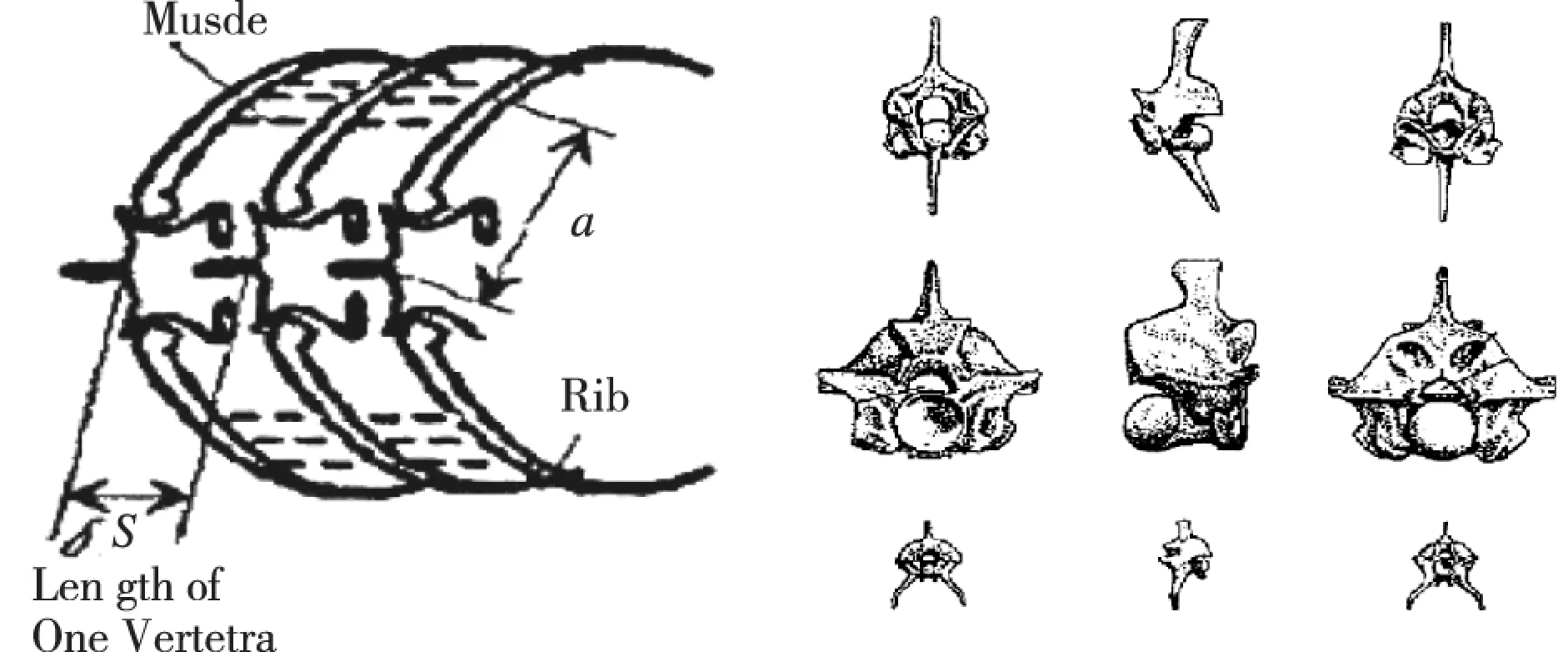
圖2 蛇的肌肉骨骼結構圖[9] 圖3 蛇的脊椎骨結構[10]
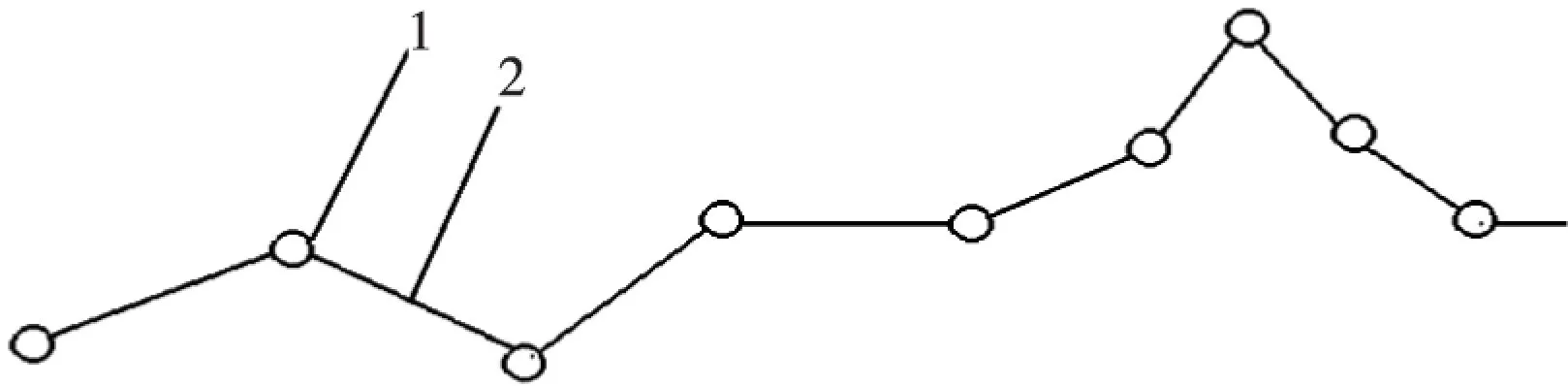
1-球形鉸鏈;2-脊椎骨圖4 體骨架抽象模型
1.3 結構方案設計
1.3.1 蛇形機器人常見結構設計方案
現階段科研學者對蛇形機器人的設計方案主要有如下幾種:
(1)平行連接
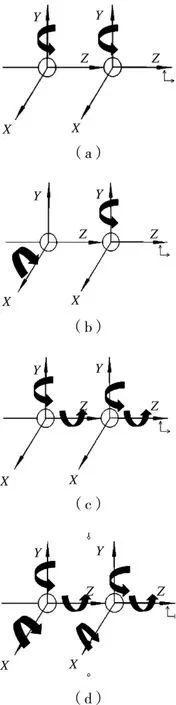
圖5 設計方案示意簡圖
平行連接(圖5a)是指組成蛇形機器人的單元模塊間均以轉動副相連,各轉動副的軸線互相平行且垂直于縱軸線。其優點是單元模塊結構簡單、控制容易、質量輕、制造成本低廉。其缺點是只能實現二維平面內的運動,單元模塊結構和蛇體的球形鉸鏈關節結構相似度也不高。
(2)正交連接
正交連接(圖5b)是指組成蛇形機器人的單元模塊間仍為轉動副,但相鄰轉動副的軸線相互垂直,且均垂直于蛇形的縱軸線。這種設計方案的優點可實現空間的三維平面內的運動,且結構相對簡單,制造成本也相對低廉。缺點是三維平面內的運動需要兩個相鄰關節間的相互配合,且工作空間不是完整的三維平面。
(3)萬向節連接
萬向節連接(圖5c)是指組成蛇形機器人的單元模塊均以十字萬向節連接,關節的一端能夠向任意方向運動。萬向節連接構型具有完整的三維工作空間和良好的空間運動靈活性,能滿足復雜環境適應性要求。但具有結構復雜、難以控制等缺點。
本文綜合平行連接、正交連接、萬向節連接的優缺點,在此基礎上重新設計了一種具備3自由度的結構設計方案,即行星齒輪差動結構(圖5d)。
1.3.2 行星齒輪差動結構
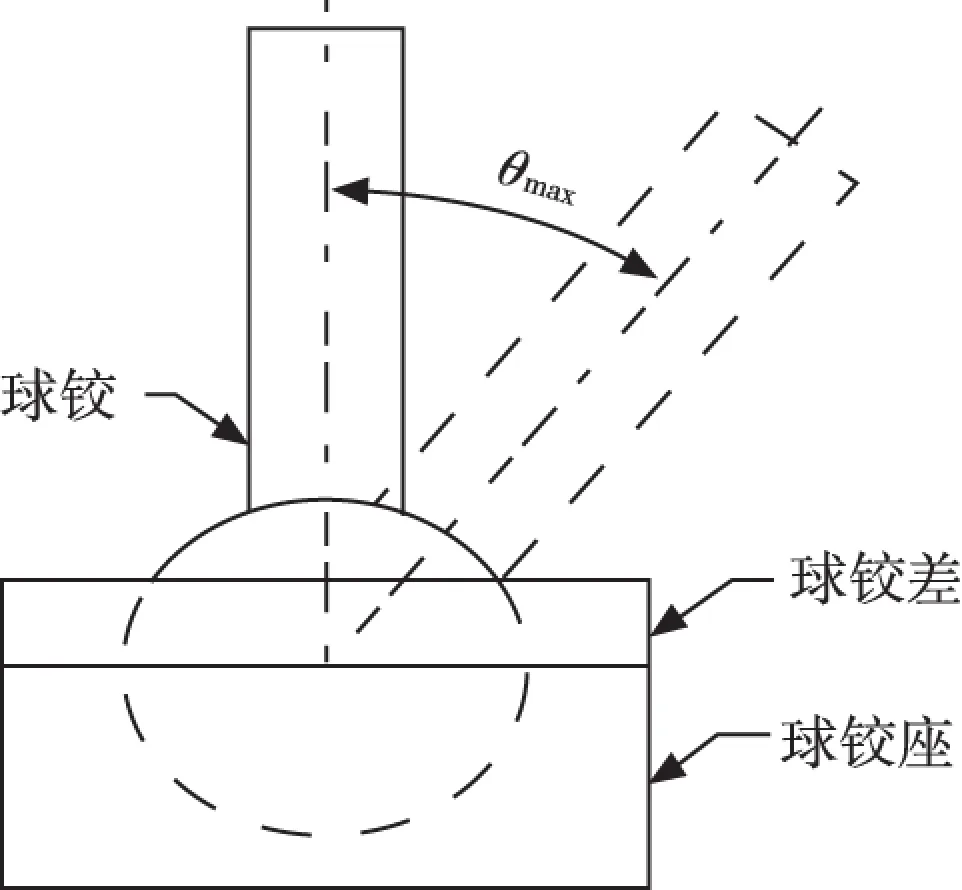
圖6 球形鉸鏈結構簡圖
球形鉸鏈連接是指組成蛇形機器人的單元模塊間均以球形萬向節連接,關節的一端能夠向任意方向運動。球形鉸鏈(圖6)由球鉸蓋、球鉸座、球鉸組成。球鉸蓋和球鉸座組成一個球腔,球鉸鑲嵌在球腔內,其中θmax為最大獨立轉角。球形鉸鏈具有易保證加工精度、獨立轉角范圍大、間隙小等優點,但由于球形鉸鏈制造成本昂貴,且承力性能不強,控制難度大,常用虎克鉸鏈加一個轉動副代替球形鉸鏈[11]。
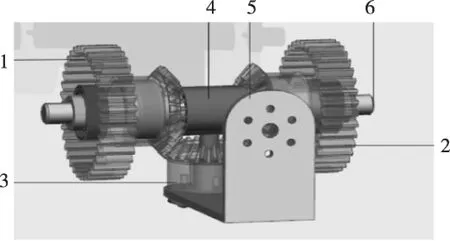
1-錐齒輪1;2-錐齒輪2;3-錐齒輪3; 4-錐齒輪支撐套; 5-連接架;6-錐齒輪支撐軸圖7 行星齒輪差動耦合機構
本文所設計的行星齒輪差動耦合結構(圖7),由三個等距錐齒輪互相耦合,錐齒輪3通過支撐套4固定在支撐軸6上 。2個舵機通過齒輪組驅動錐齒輪1和2差動耦合帶動錐齒輪3實現俯仰與偏航功能 :當兩個舵機以相同速率同向轉動時,兩個傘齒輪驅動連接架做俯仰運動;當兩個舵機以相同速率反向轉動時,兩個錐齒輪驅動連接架做偏航運動;當兩個舵機以不同的速率轉動時,兩個錐齒輪驅動連接架做俯仰和偏航的組合運動。故此結構可很好的代替虎克鉸功能,且耦合驅動使得驅動力更大;齒輪傳動使得傳動精度更高。此結構可實現的俯仰及偏航2個自由度再加上回轉舵機所能實現的1個回轉自由度,可實現嚴格意義上的3自由度,運動空間更大。
1.4 驅動方案
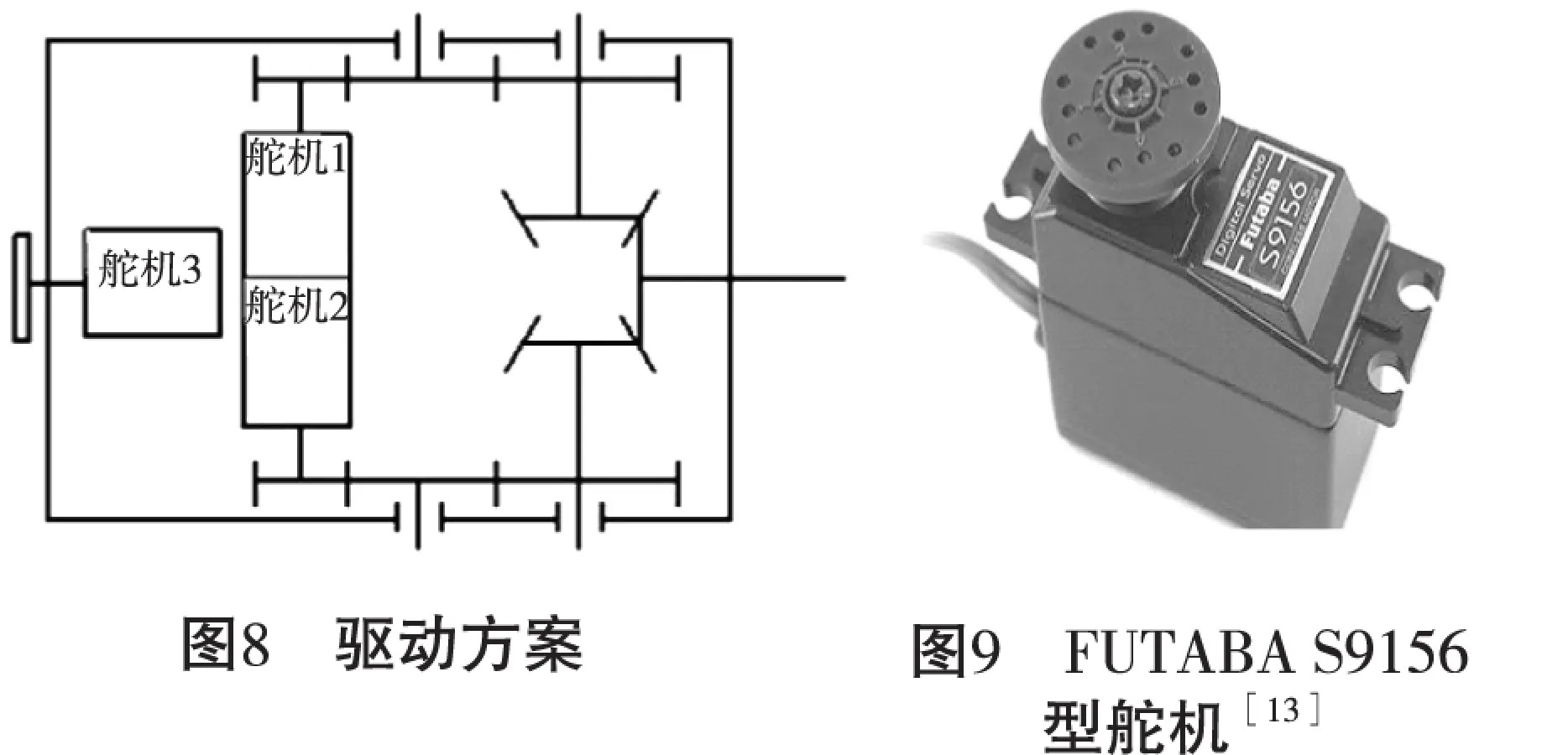
仿生蛇形機器人的驅動方案多樣,有人工肌肉驅動[12]、電機驅動[13]等。目前大多數采用的是伺服電機驅動,本次設計采用的是舵機配以減速齒輪組的驅動方案(圖8):舵機轉動將力和力矩傳出,經由減速齒輪組減速,以提高舵機的驅動力和驅動力矩,就能以較小的驅動力驅動整個蛇形機器人樣機,保證蛇形機器人的運動功能的實現。舵機選取FUTABA公司所生產的FUTABA S9156[14](圖9)型舵機。此舵機的特點是轉速快、驅動力矩大、質量輕、結構緊湊,其主要性能參數如表1 。

表1 FUTABA S9156型舵機參數
2 仿生蛇形機器人單元結構設計
2.1 模塊化設計

圖10 蛇形機器人虛擬樣機
本次設計采用模塊化設計方法,蛇形機器人只需在單元模塊設計完成之后將單元模塊進行有序組裝即可。模塊化設計具有三個顯著的特點:通用性、魯棒性和經濟性。通用性主要表現在未知的環境下,可以感知環境并做出決策的可重構系統以適應各種環境[15];魯棒性是指可以利用蛇形機器人的冗余度和全局反饋補償個別單元體的誤差,且還具有修復能力,當某一個單元體失效時,可以將此單元模塊舍棄,并由剩下的單元體代替完成其原有的功能;經濟性是指蛇形機器人的單元模塊應盡量使用相同的零件,由于相同的模塊設計、加工、制造過程都是相同的,這樣就不需要額外的設計加工,從而減少了單元模塊的制造成本,達到控制成本的目的。
2.2 蛇形機器人的機械結構設計
蛇形機器人的單元模塊機械結構設計是蛇形機器人總體設計的核心部分(圖10),本次設計采用到的蛇體單元材料主要有45鋼、40Cr、超硬鋁合金。齒輪的相關設計參數主要由機械設計[15]確定,選取的齒輪總傳動比為2,其中舵機齒輪和懸臂齒輪傳動比為2,懸臂齒輪和傘齒輪傳動比為1,依次確定軸承、傳動軸、支撐軸、齒輪支撐板、軸承座等相關尺寸。由機械設計手冊單行本[16]選取了軸承,之后根據軸承尺寸設計傳動軸和支撐軸、連接架、從動輪架、從動輪等尺寸,其中從動輪只起到改變蛇身與地面摩擦系數的作用。
2.3 蛇形機器人的主要技術參數
2.3.1 仿生蛇形機器人的尺寸及質量參數
蛇形機器人的單元體尺寸是從回轉舵機轉盤到連接架外端面的直線尺寸,所示蛇形機器人總長度為1 809.1 mm。機器人的質量主要包括機械結構部分質量、舵機質量、緊固件質量、控制部分質量。其中機械部分的質量所占比重最大,機械部分質量在UG中進行三維建模后輸入各個零件的密度之后進行質量估算。緊固件部分質量以200 g計算,控制部分質量以300 g計算,仿生蛇形機器人的總體質量約為5.213 3 kg,具體參數如表2所示。
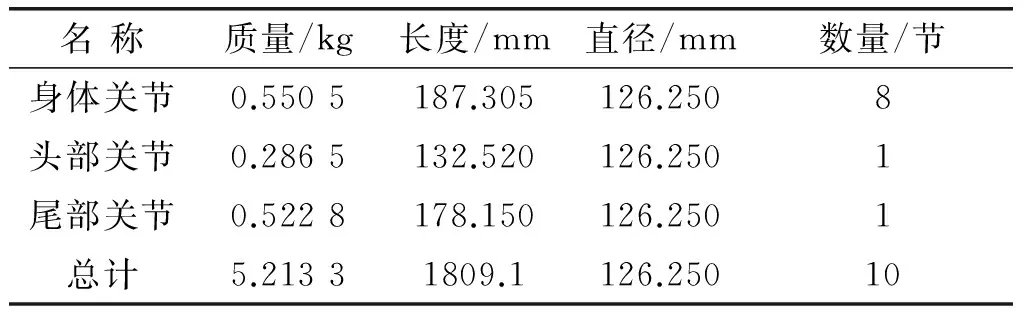
表2 仿生蛇形機器人的尺寸及質量參數
2.3.2 相鄰關節轉動范圍
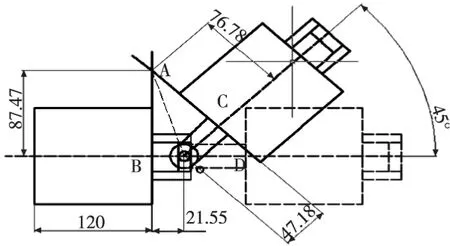
圖11 蛇形機器人臨界轉角示意圖
本文1.3.2對球形鉸鏈進行了闡述,球形鉸鏈中當球鉸運動到一定程度時會與球鉸蓋發生碰撞,無法繼續運動,球鉸原始位置到極限位置的轉動角度定義為最大獨立轉角θmax。蛇形機器人的運動是由相鄰關節間的相對轉動從而進行驅動,但是受蛇形機器人機械結構的限制,相鄰關節的轉動范圍有限,而當相鄰關節的轉動角度達到某一數值后,相鄰關節之間就會發生相互碰撞,從而影響蛇形機器人的正常運動。如圖11所示,圖中虛線部分代表單元模塊原始狀態,實現部分表示單元模塊即將發生碰撞時的狀態,本文將此轉動角度稱為臨界轉角φ,即∠COD:
(1)
2.4 蛇形機器人的運動控制
本次設計的蛇形機器人具有3個自由度:俯仰、偏航和回轉。每個單元模型共有3個舵機,其中2個舵機通過齒輪組驅動行星齒輪差動耦合實現俯仰與偏航功能,另1個舵機實現回轉功能。由單片機協調控制所有舵機的動作,單片機給舵機脈沖信號,使舵機根據信號輸出不同的轉動速度和角位移,舵機齒輪從而驅動行星齒輪差動結構進行俯仰或偏航運動,機器人蛇頭部分安裝有反饋運動狀態的力覺傳感器,從而可以將傳感器采集到的信號讀回計算機進行反饋控制,達到控制相鄰關節轉動范圍的效果。
3 結論
本文通過對生物蛇的身體結構分析,采用模塊化的設計方法,設計了一種具有行星齒輪差動結構的蛇形機器人,可實現偏航、俯仰、回轉等運動,并用UG建立了虛擬樣機,對蛇形機器人的成功研制具備實用價值。
[1]SHirose.Biologicallyinspiredrobots:snakelikelocomotorandmainpulators[J] .OxfordUniversityPress. 1993:351-363.
[2]S.Hirose.TheBio-mechanismsofSnake:roboticsresearchinhirose-yonedalaboratory[J].TokyoInstituteofTechnologyPress,1997:102-107.
[3]R.Worst.RoboticSnakes[C]//ThirdGermanWorkshoponArtificialLife.TechnischeUniversitaetMünchen, 1998: 113-126.
[4] 劉華,顏國正,等.仿蛇變體機器人的運動機理研究[J].機器人,2002, 24(2):154-158.
[5] 葉長龍,馬書根,等.蛇形機器人的轉彎和側移運動的研究[J].機械工程學報,2004,40(10):119-123.
[6] 葉長龍,馬書根,李斌,等.三維蛇形機器人巡視者Ⅱ的開發[J].機械工程學報,2009,45(5):128-133.
[7] 崔春.仿生蛇的設計及其運動仿真[D]. 哈爾濱.哈爾濱工業大學,2009.
[8] 郭燕.蛇形機器人的運動控制及步態優化[D]. 廣州:華南理工大學, 2011.
[9] 萬小丹.蛇形仿生機器人的研究[D].合肥.中國科學技術大學,2008.
[10] 鄺邵南.基于多傳感器數據融合的蛇形機器人橋梁纜索缺陷自動檢測方法研究[D].廣州.華南理工大學,2012.
[11] 高金蓮,韓英強,李波,等.并聯機器人球鉸鏈的仿真設計[J].機械設計,2007,24(2):53-55.
[12] 章軍、須文波.人工肌肉多自由度彎曲柔性關節的仿生蛇形機器人[J].江南大學學報(自然科學版),2006,5(3):337-340.
[13] 劉洋,李世其,等.單馬達驅動蛇形機器人的設計研究[J].中國機械工程,2009,20(4):401-404.
[14]http://www.futaba-rc.com/servos/digital.html.
[15] 陳麗,王越超,等.蛇形機器人的研究現況與進展[J].機器人,2002,24(6):559-563.
[16] 邱宣懷,郭可謙,等主編.機械設計:第四版[M].北京.高等教育出版社,2011.
[17] 成大先,主編.機械設計手冊·單行本·軸承[M].北京.化學工業出版社,2004.
The structure design for a bionic snake-like robot
NIE Yu,ZHANG Zhuo,LIN Yun
Through analysis body structure and motion characteristics of snake and simulation abstraction of its skeletons, a kind of bionic snake-like robot is designed, which adopts differential structure of planetary gear and has three degrees of freedom. This snake-like robot can achieve the pitch, yaw, rotation and other motion, through steering gear driving planetary gear differential coupling at different rate. This snake-like robot is equipped with sensors to perceive the environment, which makes it have strong drive capability and high transmission precision. The critical angle and other technical parameters are get by establishing virtual prototype in UG.
snake-like robot, structure design, skeleton abstraction, differential structure of planetary gear
TH126
A
1002-6886(2016)06-0040-05
聶宇(1991-),男,貴州畢節人,助工,學士學位,主要研究方向為仿生蛇形機器人技術。 張琢(1985-),男,貴州思南人,貴陽學院機械工程學院講師,哈爾濱工業大學碩士學位,主要研究方向為仿生機器人技術。 林蕓(1965-),女,貴陽學院機械工程學院院長,教授,西安交通大學材料工程碩士,主要研究方向為機械設計與選進制造技術。
2016-06-05
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
