基于AMESim和RecurDyn的履帶車轉向系統聯合仿真分析
2016-12-20 11:01:50張蕊
現代機械 2016年6期
張 蕊
(貴州大學工程實訓中心,貴州貴陽550003)
?
基于AMESim和RecurDyn的履帶車轉向系統聯合仿真分析
張 蕊
(貴州大學工程實訓中心,貴州貴陽550003)
根據鉸接式履帶車轉向系統的工作原理,在RecurDyn軟件和AMESim軟件中分別建立履帶車的虛擬樣機和轉向系統的液壓系統;通過兩種軟件的對接,實現履帶車轉向系統的機械-液壓聯合仿真。運用聯合仿真方法,分析了履帶車原地轉向時轉向液壓缸的液壓特性變化情況。通過試驗驗證,試驗數據與仿真結果非常接近;表明聯合仿真模型的可靠性,為后期系列產品的設計制造提供可靠數據。
AMESim軟件 RecurDyn軟件 轉向系統 聯合仿真
0 引言
鉸接式履帶車通過鉸接機構連接前后兩個車體,鉸接機構中的兩個水平對稱的液壓缸驅動車體實現左右轉向。鉸接轉向系統對車輛的機動性能和通過性能具有重要影響,而單一的分析其機械性能或者液壓性能已經不能很好地模擬實際工作狀態,但是要構建一種高精度的非線性動態理論模型仿真實際工作系統是非常困難的。因此,運用計算機仿真技術把機械轉向模型和液壓轉向系統進行聯合仿真,分析研究其特性成為優化設計、提高系統穩定性及可靠性的重要手段。
1 履帶車鉸接轉向系統的工作原理
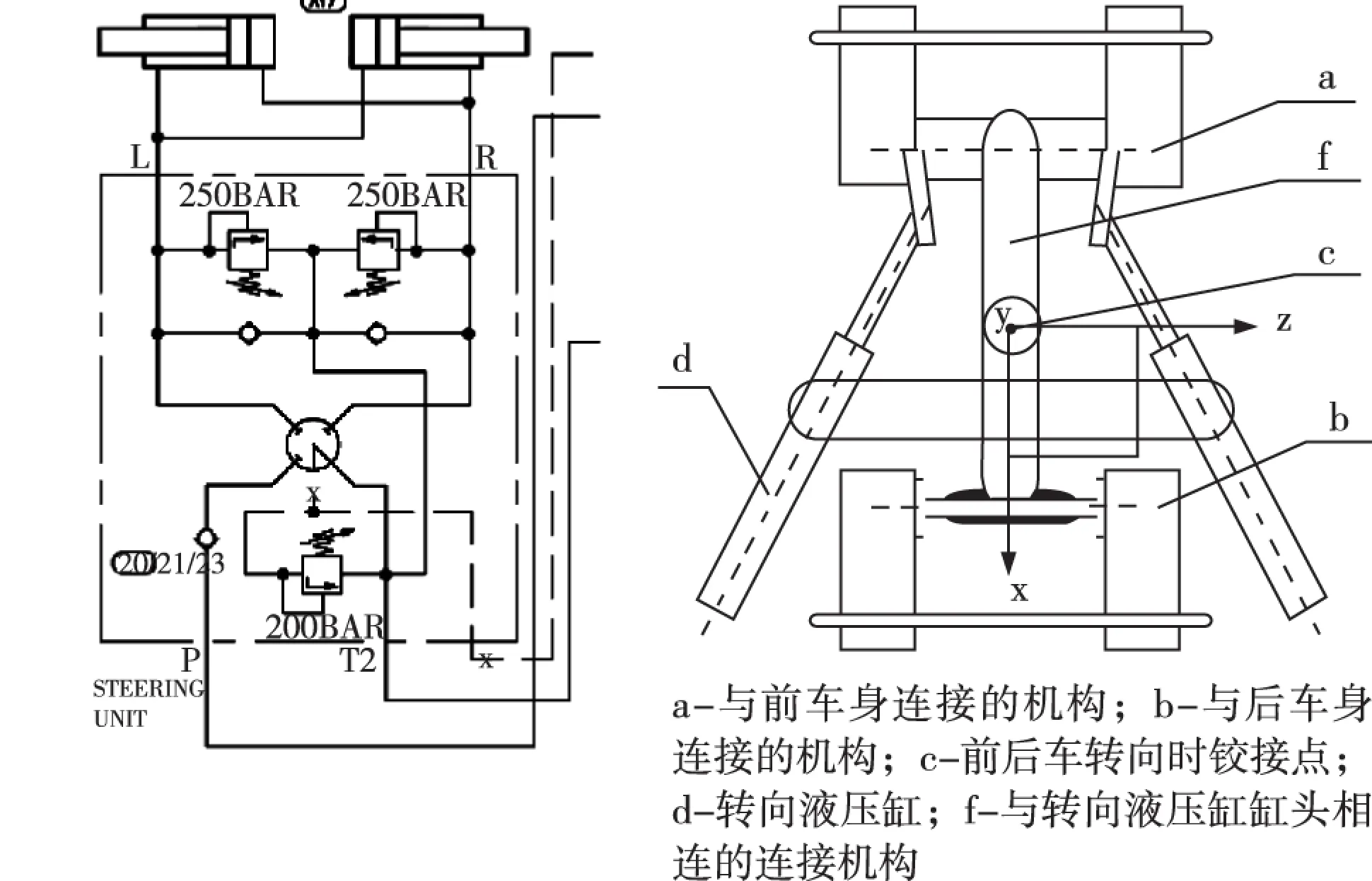
圖1 轉向系統液壓原理圖 圖2 轉向機構簡圖
履帶車鉸接轉向系統的工作原理如圖1所示,該系統主要有轉向液壓缸、轉向器總成和供、回油系統三大部分組成(圖2)。在該系統中,由壓力流量補償變量泵提供動力,轉向器總成控制液壓油流量大小。當運作轉向器的時候,轉向器的出油口會跟油缸負腔相通,反饋到變量泵上面,使得提供給轉向系統的液壓泵的排量隨著負載的不同而變化。通過壓力控制,轉向器的壓差發生變化,液壓油按照需要進入轉向器,進而調整轉向液壓缸中流量,從而實現車輛轉向的穩定性。
2 履帶車轉向系統的仿真模型建立[1-2]
2.1 AMESim和RecurDyn聯合仿真的原理及軟件環境設置[3]
RecurDyn的Hydraulic工具包和AMESim的Interface block工具包中提供了機械系統和液壓系統聯合仿真的接口,通過接口數據模塊,可以實現液壓軟件AMESim和RecurDyn機械模型的耦合仿真,適用于液壓系統與機械系統交互的系統設計。
對AMESim接口設置時,必須保證系統中裝有C++,然后將RecurDyn安裝路徑下CoSim_AMESim下的整個文件夾復制到AMESim安裝目錄的LIB文件夾中。在進行聯合仿真時,要把RecurDyn中建立的機械模型和AMESim中建立的液壓系統模型都存放在一個英文文件夾里面,這樣才是設置了正確的聯合仿真環境。
兩個軟件運用各自獨立的求解器計算,仿真完成后,停止AMESim軟件仿真。在AMESim軟件里面查看液壓特性的變化,在RecurDyn環境里面,單擊Plot Result按鈕,在后處理界面的右側數據庫中可以機械模型的運動學和動力學仿真參數。
2.2 AMESim和RecurDyn聯合仿真模型的建立
2.2.1 轉向液壓系統模型的建立

圖3 液壓轉向系統AMESim仿真建模及接口設置
根據轉向系統的工作原理,通過AMESim軟件中的元件子模型和接口工具包,建立圖3所示的液壓轉向系統仿真模型及其聯合仿真環境接口[4]。從圖中可以看出,液壓系統向機械模型輸入活塞桿的速度,機械模型中的活塞桿根據輸入的速度信號進行運作,運作受到的阻力又作為機械模型的輸出,傳給液壓系統,作為它的輸入,活塞桿受外力產生運動,運動帶來速度。往復傳輸,形成了閉環系統[5],以此來實現履帶車的轉向。
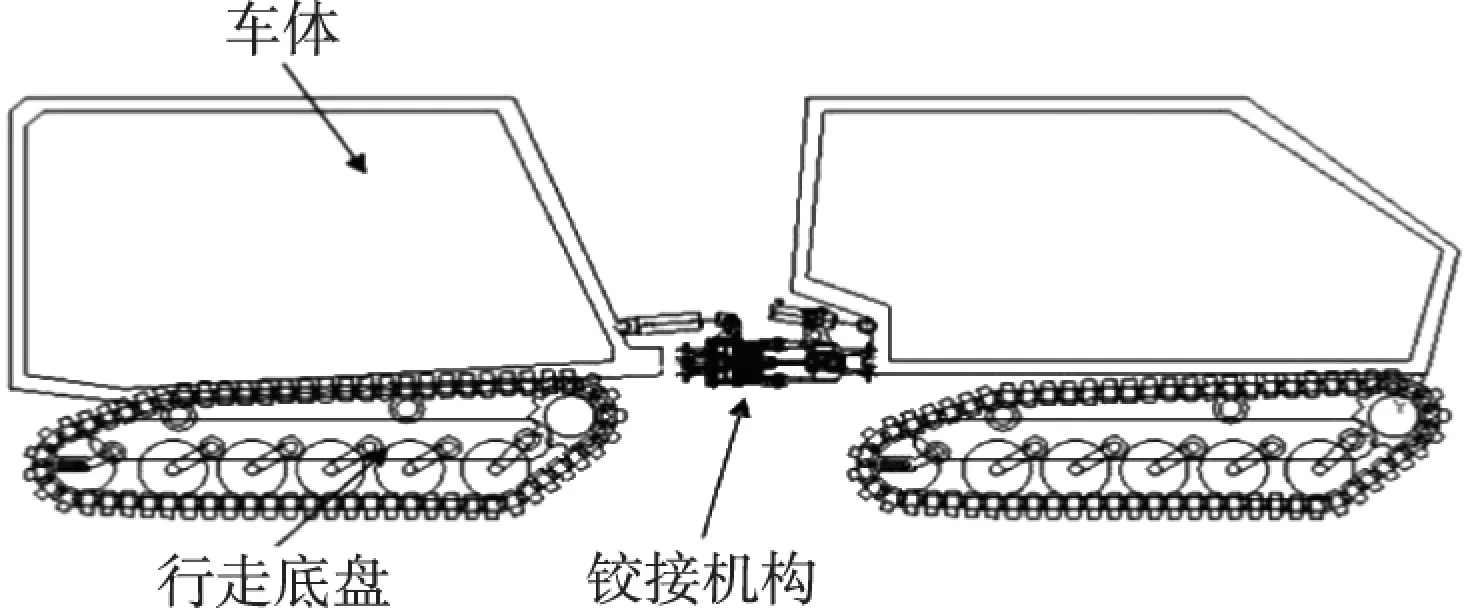
圖4 履帶車虛擬樣機
2.2.2 鉸接式履帶車的整車虛擬樣機的建立
在RecurDyn軟件中建立的履帶車整車虛擬樣機如圖4所示,包括鉸接轉向機構[6]、行走底盤[7]和前后車體,并在RecurDyn/Hydraulic環境下設置聯合仿真的接口。
模型建立完成后,在RecurDyn和AMESim軟件中設置各項參數。在參數設置過程中,需要注意下面三點:
1)RecurDyn輸入和輸出的單位一定要和AMESim中輸入輸出的單位統一。
2)在定義液壓缸輸出位移的時候,要根據液壓缸的實際安裝情況,確保RecurDyn和AMESim中液壓缸的初始位移位置相同,否則就會出現錯誤的動作。
3)采集信號的步調要設置一致,確保AMESim運行模式下的信號間隔、RecurDyn中CoSim模式下的交互時間間隔以及RecurDyn中Dynamic/Kinematic Analysis模式下的時間間隔統一起來。
3 履帶車轉向過程的聯合仿真
車輛轉向時不僅受到路面參數的影響,還會受到轉向方式的影響。由于車輛在原地轉向時受到的轉向阻力大于車輛行駛中轉向阻力,故分析研究了履帶車在原地轉向時的轉向特性。在RecurDyn中設置履帶車為空載狀態,轉向液壓缸處于自由狀態;在AMESim中設置方向盤轉速為50 rad/s,設定活塞缸的位移范圍,使得車輛向左轉向。為了增加對比性,設定履帶車在第1 s時開始轉向,5 s內完成轉向。
原地轉向時在虛擬樣機中設置行走系統中的驅動輪轉速為零,路面設置為水泥地面;履帶車原地轉向時的轉向特性仿真曲線如圖5所示。
圖5中(a)、(b)為AMESim軟件后處理中導出的曲線圖,分別表示了原地左轉時左側液壓缸兩腔內的壓力、流量變化情況。從兩腔壓力對比看出,左側液壓缸有桿腔與無桿腔之間的壓差克服了車輛轉向時受到的阻力,且每腔的流量變化隨著壓力的變化而產生變化浮動。從圖中可以看出,轉向中系統的最大壓力接近140 Bar,最大流量接近16 L/min。在AMESim軟件的后處理中,很明顯的表示了液壓油的流進和流出,流進為正值,流出為負值。
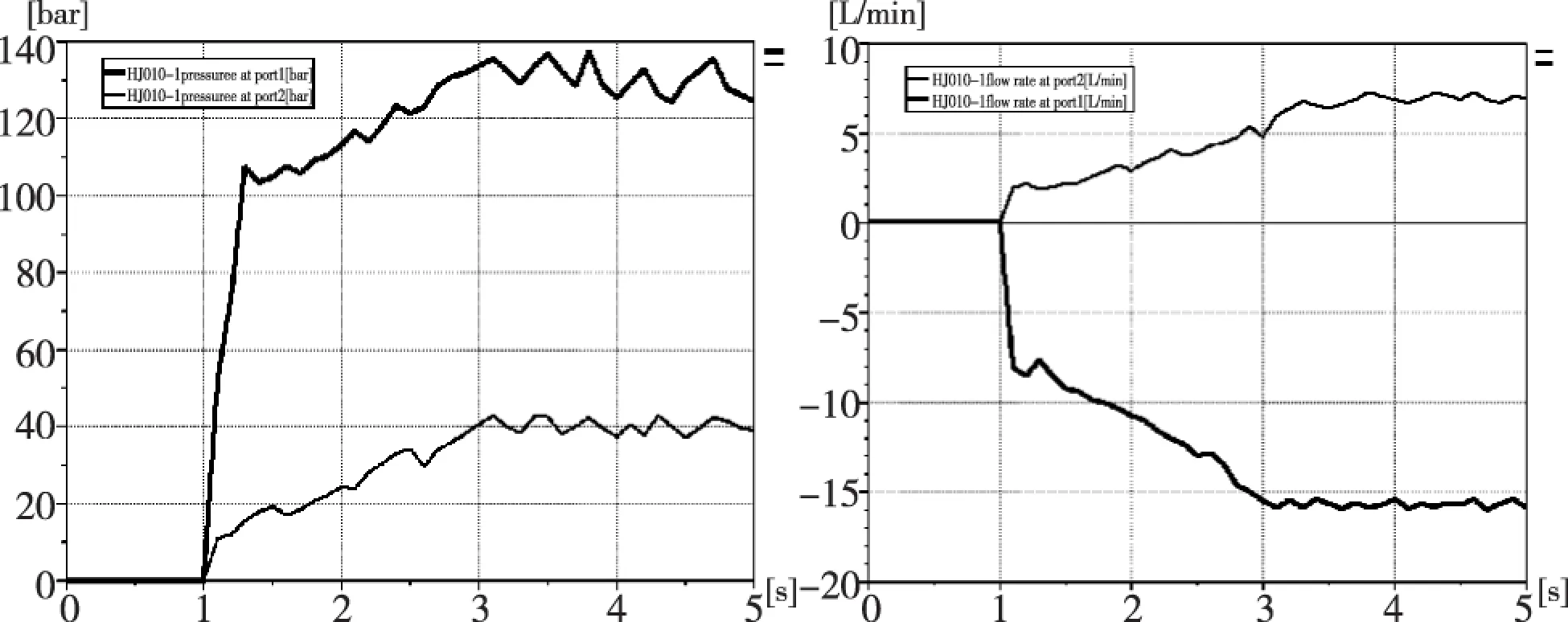
(a)左側液壓缸兩腔壓力 (b)左側液壓缸兩腔流量圖5 聯合仿真液壓特性圖
4 試驗驗證與分析
對實際車輛進行試驗,試驗路面為廠區內較為平坦的水泥地面,車輛為空載狀態。通過司機控制履帶車方向盤,實現車輛的原地向左轉向,利用雷諾公司開發的CHPM手持式液壓測試儀采集轉向液壓缸的壓力、流量數據,其試驗曲線如圖6所示。
試驗曲線與聯合仿真曲線對比還可以發現,試驗曲線的波動范圍要大些。這主要是因為廠區的水泥地面存在不平整的情況,路面不平時會造成整車的波動,但在聯合仿真過程中,則理想化設置了路面,所以特性曲線呈現的比較平緩。

圖6 試驗液壓特性圖
由于計算機仿真軟件的某些局限,后處理中不能同時導出同一側液壓缸中的壓力、流量曲線,所以在圖5中分別導出的左側液壓缸兩腔的壓力、流量曲線;但試驗中,為了保證測量數據的準確性,對液壓缸的有桿腔或者無桿腔同時測其壓力、流量,這樣就沒有實現仿真曲線圖和實驗曲線圖的一一對照。
圖6中(a)、(b)液壓特性曲線與圖5中(a)、(b)相比,試驗開始時液壓缸里面存在壓力差,且比聯合仿真中的壓差稍微大些;且在轉向開始后,試驗曲線與聯合仿真曲線沒有呈現出一一對應的關系,但是左側液壓缸有桿腔和無桿腔的壓力、流量曲線的走勢形態與聯合仿真得到的曲線則近乎保持一致。這是因為在仿真軟件中,液壓系統的建模稍微簡單化和理想化,虛擬樣機與實際車輛之間也存在某些簡化的差異,試驗測試中也會存在某些誤差,但是不影響對履帶車轉向特性的分析。
5 結論
根據履帶車轉向系統原理,建立履帶車的動力學模型和轉向液壓系統。通過軟件之間的接口,實現轉向系統的機械模型和液壓系統的聯合仿真。通過聯合仿真結果和試驗數據的對比,驗證了聯合仿真得到的轉向液壓系統特性參數變化的確切性, 為液壓轉向系統和鉸接機構的優化設計提供了可靠依據。
[1] 陸倩倩.流量放大全液壓轉向系統的仿真分析及實驗[D].杭州:浙江大學,2010.
[2] 付永領,祁小野.AMESim系統建模和仿真-從入門到精通[M].北京:北京航空航天出版社,2006:5-25.
[3] 焦曉娟,張湝渭,彭斌彬.RecurDyn多體系統優化仿真技術[M]. 北京:清華大學出版社, 2010:298-319.
[4] 郭勇,彭勇,過新華,等.運用ADAMS和AMESim聯合仿真的LUDV液壓系統動態特性分析[J].現代制造工程,2010(7):30-34.
[5] 王小中,卜繼玲,劉運兵.ADAMS/Rail與AMESim聯合仿真技術及其應用研究[J]. 機床與液壓,2011,39(11):98-101.
[6] 陳金濤,李力,王俊杰.鉸接式履帶車輛轉向特性仿真研究[J].計算機仿真,2007,24(12):155-158.
[7] 周少虎.橡膠履帶車輛振動特性研究[D].洛陽:河南科技大學,2010.
Co-simulation analysis of the steering system of tracked vehicle based on AMESim and RecurDyn
ZHANG Rui
The virtual prototype and the hydraulic steering system were established on the platform of RecurDyn software and AMESim software, according to the working principle of steering system of articulated tracked vehicle. It can realize combined mechanical-hydraulic simulation of the steering system on this platform. Hydraulic characteristics change of steering hydraulic cylinder was analyzed as the tracked vehicle pivot steering by the co-simulation technology. Experiment showed that the simulation results were consistent with the experimental results, and the model provided a reliable basis for later design and manufacture of series of products.
AMESim software, RecurDyn software, steering system, co-simulation
TP391.9
A
1002-6886(2016)06-0022-04
張蕊(1985-),女,河南人,碩士研究生,實驗師,主要從事工程訓練教學、現代制造技術研究工作。
2016-06-26
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
