平臺、捷聯(lián)慣導(dǎo)系統(tǒng)維修保障專利差異分析
2016-11-16 07:46:30田靜分孔立軍焦梅素
河南科技 2016年14期
田靜分 孔立軍 焦梅素
(石家莊海山實業(yè)發(fā)展總公司,河北 石家莊 050208)
平臺、捷聯(lián)慣導(dǎo)系統(tǒng)維修保障專利差異分析
田靜分 孔立軍 焦梅素
(石家莊海山實業(yè)發(fā)展總公司,河北 石家莊 050208)
本文從慣性導(dǎo)航系統(tǒng)的結(jié)構(gòu)、原理等方面比較了平臺式慣導(dǎo)和捷聯(lián)式慣導(dǎo)的異同。通過二者在實驗環(huán)境、設(shè)備保障、定期標(biāo)校等方面的分析,找出維修差異,為平臺、捷聯(lián)式慣導(dǎo)系統(tǒng)的維修保障提供參考。
平臺式慣導(dǎo);捷聯(lián)式慣導(dǎo);維修保障差異分析
與世界發(fā)達國家相比,慣性導(dǎo)航技術(shù)在我國起步較晚,經(jīng)過幾十年的研制,兩大關(guān)鍵慣性元器件陀螺和加速度計從液浮式到撓性支撐,系統(tǒng)實現(xiàn)從平臺式到捷聯(lián)式,導(dǎo)航方式從純慣性導(dǎo)航到與衛(wèi)星組合導(dǎo)航。目前,我國投入使用的有平臺式和捷聯(lián)式兩類慣性導(dǎo)航系統(tǒng),中高精度的平臺式慣導(dǎo)已經(jīng)批量裝機使用,低成本、中等精度的捷聯(lián)式慣導(dǎo)已經(jīng)批量生產(chǎn)并投入使用。
隨著裝備的陸續(xù)到壽,目前平臺式慣導(dǎo)系統(tǒng)已經(jīng)開始翻修,可以預(yù)見,捷聯(lián)式慣導(dǎo)系統(tǒng)也將面臨同樣問題,因此有必要對其維修保障所需實驗環(huán)境、測試設(shè)備、標(biāo)校要求等與平臺式慣導(dǎo)系統(tǒng)進行對比分析,進而做到有的放矢。
1 平臺式慣性導(dǎo)航系統(tǒng)與捷聯(lián)式慣性導(dǎo)航系統(tǒng)的異同
將陀螺儀和加速度計等慣性元件安裝在一個機械穩(wěn)定平臺上,模擬當(dāng)?shù)氐乩碜鴺?biāo)系是平臺式慣導(dǎo)的顯著特點,在平臺內(nèi)建立實際導(dǎo)航坐標(biāo)系,并且與載體振動隔離,慣性敏感元件工作在穩(wěn)定良好的環(huán)境中,導(dǎo)航計算量小,慣性元件的輸出較易補償和修正。但是其結(jié)構(gòu)復(fù)雜,體積大,成本高,維修費用十分昂貴,可靠性較差。
捷聯(lián)式慣導(dǎo)的最大特點是沒有機械式陀螺穩(wěn)定平臺,將慣性敏感元件陀螺和加速度計直接固連到運載體上,它們的三個敏感軸分別相互垂直,組成機體坐標(biāo)系。三個單自由度陀螺分別敏感載體角速度,計算機直接與陀螺輸出的數(shù)字信息進行綜合,經(jīng)處理解算得到的姿態(tài)矩陣把機體坐標(biāo)系變換到導(dǎo)航坐標(biāo)系,然后進行導(dǎo)航參數(shù)計算。可見,捷聯(lián)式慣導(dǎo)系統(tǒng)中已不再有實體的穩(wěn)定平臺,平臺的作用已由計算機及其軟件的作用代替,所以也稱捷聯(lián)式慣導(dǎo)系統(tǒng)采用的是“數(shù)學(xué)平臺”。
2 兩類慣性導(dǎo)航系統(tǒng)維修保障差異
通過捷聯(lián)式慣導(dǎo)與平臺式慣性導(dǎo)在結(jié)構(gòu)、原理上的不同對比,可以從以下幾個方面分析二者在維修保障時的不同需求:
2.1 實驗環(huán)境
對于平臺式慣導(dǎo),平臺用于模擬一個導(dǎo)航坐標(biāo)系,把加速度計的測量軸穩(wěn)定在導(dǎo)航坐標(biāo)系,并用模擬的方法給出載體的姿態(tài)和方位信息。由于其物理穩(wěn)定平臺結(jié)構(gòu)精密,為四環(huán)框架,平臺要精確實時跟隨地理坐標(biāo)系,要求其環(huán)架結(jié)構(gòu)轉(zhuǎn)動均勻靈活,工程實現(xiàn)上對其裝調(diào)環(huán)境有著嚴(yán)苛的要求,實驗室潔凈度不低于十萬級,人員保證在全防護狀態(tài)下才能對臺體進行裝調(diào)工作,否則過多的塵埃極易造成摩擦力矩大,進而影響臺體性能指標(biāo);平臺式慣導(dǎo)中,“挑剔”的臺體通過減震器已經(jīng)裝在穩(wěn)定、可靠的機箱中,故系統(tǒng)級實驗只需在相對封閉、防靜電的環(huán)境中即可。
對于捷聯(lián)式慣導(dǎo),其顯著的特點即為與載體固連,其角速度敏感元件為全固態(tài)陀螺儀,臺體裝調(diào)環(huán)境要求較低,滿足三十萬級就可以正常工作;系統(tǒng)級實驗也需在相對封閉、防靜電的環(huán)境中,與平臺式慣導(dǎo)相同。
2.2 設(shè)備保障
由加速度計和陀螺儀實現(xiàn)的功能可知,加速度計用來敏感加速度,陀螺儀用來敏感角速度,而達到慣性級儀表要求的加速度計隨機零位偏差應(yīng)優(yōu)于10-4g(1g=9.8 m/s2),陀螺儀的隨機漂移率應(yīng)優(yōu)于0.01°/h,這樣二者在慣性導(dǎo)航系統(tǒng)規(guī)定的初始對準(zhǔn)時間內(nèi)才能精準(zhǔn)找到當(dāng)?shù)厮矫婧蜏y出當(dāng)?shù)氐厍蜃赞D(zhuǎn)角速度分量,故在實驗室中要把兩大慣性器件的性能進行精確測定就要將外界振動干擾進行專門隔離,這就需要創(chuàng)建穩(wěn)定基礎(chǔ),通常是在實驗室進行基礎(chǔ)建設(shè)剛開始就要將地基留好。當(dāng)然,無論是捷聯(lián)式慣導(dǎo)還是平臺式慣導(dǎo)對此要求都是一致的。
由于純慣性導(dǎo)航參數(shù)短時間內(nèi)精度較高,但誤差隨時間快速積累而導(dǎo)致系統(tǒng)精度迅速降低,長時間工作后便無法滿足導(dǎo)航精度要求,實時用衛(wèi)星信息對慣導(dǎo)進行校正形成組合導(dǎo)航系統(tǒng),可以很好的解決這個問題,為此實驗室需要衛(wèi)星轉(zhuǎn)發(fā)器、信號傳輸電纜及發(fā)射天線。在這方面,平臺式與捷聯(lián)式慣導(dǎo)需求也是一致的。
慣導(dǎo)系統(tǒng)調(diào)試完成后需要多維度的實驗,全面模擬外場復(fù)雜的使用環(huán)境,以此驗證系統(tǒng)的性能及功能。在北向基準(zhǔn)轉(zhuǎn)臺上通過與轉(zhuǎn)臺基準(zhǔn)比較航向角、姿態(tài)角的輸出,驗證系統(tǒng)的航向、姿態(tài)精度,實驗室需要北向基準(zhǔn)的建立;雙軸自動轉(zhuǎn)臺實現(xiàn)常溫下的靜止導(dǎo)航實驗,驗證系統(tǒng)的位置精度、速度精度;振動臺和高低溫箱驗證系統(tǒng)在惡劣環(huán)境下的導(dǎo)航精度;工程實驗車驗證系統(tǒng)在動態(tài)環(huán)境下的導(dǎo)航精度,接口及功能測試設(shè)備驗證系統(tǒng)對外交聯(lián)信號輸入輸出的正確性。慣導(dǎo)系統(tǒng)固然都需這些設(shè)備,但是因為兩類慣導(dǎo)在硬件連接、測試軟件等方面的巨大差異,設(shè)備通用性不強。
由于平臺式慣導(dǎo)是在恒定溫度下工作,系統(tǒng)內(nèi)部自設(shè)溫控回路,結(jié)合調(diào)試方法可以知道系統(tǒng)級實驗需要配置通風(fēng)冷卻裝置;而捷聯(lián)式慣導(dǎo)的啟動工作對溫度沒有要求,無論在外場使用環(huán)境還是內(nèi)場實驗室都不需通風(fēng)冷卻裝置,但因其調(diào)試階段需要對陀螺和加速度計進行全溫度范圍內(nèi)相關(guān)參數(shù)的測試及補償,也就是溫度標(biāo)定,所以帶溫度控制的轉(zhuǎn)臺(簡稱溫控轉(zhuǎn)臺)需要配置。
為保證平臺式慣導(dǎo)的穩(wěn)定平臺與捷聯(lián)式慣導(dǎo)的激光陀螺工作在適宜的環(huán)境,二者都需要密封充氣裝置,又由于兩種臺體在結(jié)構(gòu)組成上的巨大差異,使得該設(shè)備不可通用。
此外,平臺式慣導(dǎo)系統(tǒng)內(nèi)部的陀螺儀、加速度計均為撓性支撐,撓性頭比頭發(fā)絲還要細,在非工作狀態(tài)十分脆弱,極易損壞,捷聯(lián)式慣導(dǎo)的加速度計也是如此,因此無論是慣性敏感元件還是臺體組件或者慣性導(dǎo)航系統(tǒng),在轉(zhuǎn)工運輸過程中都要放到專門的減震周轉(zhuǎn)箱,防止磕碰損傷。
2.3 定期標(biāo)校
前面提到,慣性導(dǎo)航系統(tǒng)的誤差會隨著時間而累積,兩大關(guān)鍵慣性器件陀螺和加速度計的性能指標(biāo)也會發(fā)生變化,標(biāo)校就是對慣性導(dǎo)航部系統(tǒng)基本參數(shù)的標(biāo)定和校準(zhǔn),使之滿足使用要求。平臺式慣導(dǎo)的臺體零部件維修更換因為在要求苛刻的環(huán)境中實現(xiàn),故外場標(biāo)校需要環(huán)境、設(shè)備齊全的工程車,而捷聯(lián)式慣導(dǎo)的慣性敏感元件直接與載體固連,故其相關(guān)參數(shù)的全面標(biāo)定需要在設(shè)施齊全的實驗室環(huán)境中才能進行,配有采集軟件的筆記本在外場環(huán)境下只可實現(xiàn)基本參數(shù)的簡單標(biāo)校。
3 結(jié)語
本文針對已經(jīng)開始翻修的平臺式慣導(dǎo)和即將進入翻修期的捷聯(lián)式慣導(dǎo)從結(jié)構(gòu)、原理方面進行了比較,重點在維修保障涉及的實驗環(huán)境、設(shè)備保障、定期標(biāo)校等幾個方面進行詳細闡述對比,得出平臺式慣導(dǎo)與捷聯(lián)式慣導(dǎo)的實驗室基礎(chǔ)建設(shè)及衛(wèi)星信號轉(zhuǎn)發(fā)需求一致,環(huán)境要求、設(shè)備保障需求不盡相同的結(jié)論。應(yīng)注意的是裝備實際維修保障時要根據(jù)維修級別、維修深度進行相應(yīng)的實驗室建設(shè)。
[1]李躍,邱致和.導(dǎo)航與定位[M].北京:國防工業(yè)出版社,2008.
[2]于波,陳云相,郭秀中.慣性技術(shù)[M].北京:北京航空航天大學(xué)出版社,1994.
[3]李曉峰.捷聯(lián)慣導(dǎo)和組合導(dǎo)航的仿真研究[D].西安:西安電子科技大學(xué),2010.
Difference Analysis of Maintenance Support Patent in Plantform Inertial Navigation System and Strap-down Inertial Aavigation System
Tian JingfenKong LijunJiao Meisu
(Shijiazhuang Haishan Industrial Development Corporation,Shijiazhuang Hebei 020208)
Based on the structure and principle of the inertial navigation system,the similarities and differences between the platform inertial navigation system and the strapdown inertial navigation system are compared.Through the analysis of the two aspects in the experimental environment,equipment support,regular calibration and so on,to find out the maintenance differences,to provide reference for the maintenance of the platform and the strap down inertial navigation system.
plantform inertial navigation;strap-down inertial navigation;difference of maintenance support

2016年河南省各省轄市及直管縣(市)專利申清量統(tǒng)計表(7月)
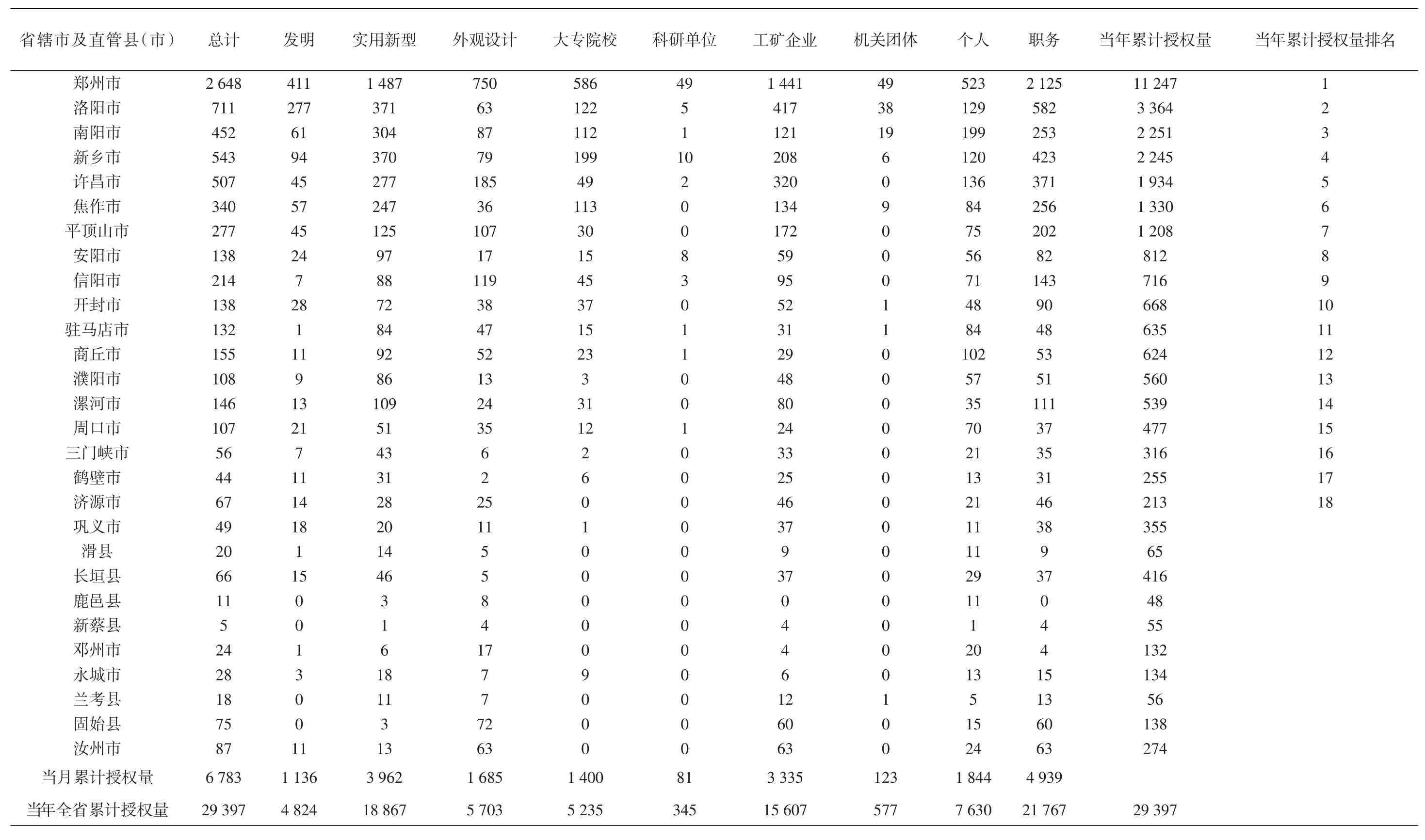
2016年河南省各省轄市及直管縣(市)專利授權(quán)量統(tǒng)計表(7月)
V249.322
A
1003-5168(2016)07-0092-02
2016-6-30
田靜分(1982-),女,碩士研究生,工程師,研究方向:捷聯(lián)慣導(dǎo)系統(tǒng)的修理及保障。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
