基于STM32模擬智能導游機器人系統設計
2016-11-09 23:35:19藍麗金潘運丹李君弋
數字技術與應用 2016年9期
藍麗金 潘運丹 李君弋


摘要:本研究旨在為廣大游客提供更加便捷、高效的智能導游服務,以STM32作為核心控制器,研究一套類人型的智能小型輪式機器人系統。該系統分為八個模塊:主控模塊、投幣模塊、語音模塊、穩壓模塊、驅動模塊、循跡模塊、避障模塊以及輔助模塊,實現機器人根據游客要求提供最優參觀景區線路,并進行全程智能解說服務。
關鍵詞:機器人 導游 STM32
中圖分類號:TP2442 文獻標識碼:A 文章編號:1007-9416(2016)09-0145-02
1 引言
智能機器人已經在工業、農業、醫學、航天、甚至軍事上等諸多領域的應用,很大程度上提高了生產效率,并代替人類完成高效、高精度、高危險的作業過程,解放了很大一部分的勞動力,智能機器人已為社會創造很大的價值。而服務機器人是當今智能控制領域的一個研究熱點[1],智能移動機器人可以說是智能導游機器人的前身,其最早在60年代末期就開始了研究[2],作為各種類型機器人的基礎技術平臺,它能通過各種傳感器、定位系統等來進行識別,從而去感覺周圍的情況,了解自身所處的狀態,實現在復雜的環境中去躲避障礙物自主向指定的目標運動,繼而實現一定功能、完成一連串任務的系統。智能導游機器人融合智能機器人技術和導游服務,它將提高導游行業的工作效率,大大減輕導游工作負擔,一定程度上代替人工導游工作,提高旅游行業的經濟效益。
2 系統總架構
本設計研究的智能導游機器人系統可以分為九個模塊:主控模塊、電機驅動模塊、光電循跡模塊、紅外避障模塊、語音模塊、模擬投幣模塊、按鍵模塊、LCD模塊、電源穩壓模塊。其中投幣模塊、按鍵模塊、LCD模塊和E18-D50NK光電傳感器可合并為輔助模塊。
智能導游機器人系統中,各個模塊相輔相成,缺一不可。電源穩壓模塊為主控模塊及其他模塊提供穩定的電源,主控模塊通過循跡模塊采集路面線路信息,通過紅外壁障模塊采集障礙物等信息,然后再傳遞信號給電機驅動模塊對電機進行操作,如此來實現導游機器人準確的行走和自動壁障等功能;語音模塊通過主控模塊可以實現簡單的人機交互功能,解說景點的人文地理;投幣模塊在本設計是一個光電傳感器模擬而成,以揮手來代表投幣,游客投幣結束后通過按鍵模塊確認,然后將信號傳給主控模塊進行處理;LCD模塊將主控模塊處理的部分信息顯示給游客觀看。智能導游機器人系統總架構如圖1所示。
3 系統主要模塊設計與實現
本設計采用STM32f103ZET6微處理器作為核心控制器,根據需要使用該主控的接口引出來與外圍設備進行連接。作為核心的主控模塊,它是智能導游機器人的大腦,其主要功能是將各模塊反饋的信息進行處理和控制,如避障模塊檢測到障礙、循跡模塊檢測到岔路口或者景點后,反饋給主控,主控根據程序命令調節電機驅動模塊和語音模塊,使得機器人可以進行轉彎、調速及解說等功能。
3.1 電機驅動模塊
該模塊是兩個部分組成的,一個是驅動模塊,另一個是電機;其主要功能是為智能導游機器人通過驅動模塊對電機進行調速控制,從而控制機器人的運行以及對特殊路面情況的相應動作[3]。
(1)本設計電機采用4個28JX5K19G直流減速電機。直流減速電功率可達95KW以上,能耗低,節省空間,有較大的力矩。主控制模塊采用PWM調速法通過驅動模塊控制電機的轉速,改變一系列頻率輸出固定方波的占空比,從而改變加在電機的平均電壓,通過功率放大器驅動電機,可改變電機的轉速,實現機器人的前進、后退、轉彎等功能。
(2)本設計驅動模塊采用的是Abilix驅動器,該模塊是主控系統和電機的連接紐帶,主控通過驅動模塊控制電機的正反轉以及改變與驅動模塊連接的通道口電平的高低來控制電機的運行狀態。如圖2所示為電機驅動實物圖。表1所示為驅動模塊的極限參數。
3.2 循跡與避障模塊
(1)設計中光電循跡模塊主要由16個光電二極管、8個光敏三極管、 2個LM339M芯片、16個LED燈組合而成[4]。其功能是對白線進行識別,使探險游機器人可以按規劃好的路線前進到達方案所設計的目的地,并能分辨交叉路口以便按程序選擇路徑進行調整。
該模塊主要采用的兩個元件是3DU5C硅光敏三極管、LM339電壓比較器。
(2)避障模塊采用E18-D80NK光電傳感器,它是一種漫反射式光電傳感器,集發射與接收于一體[5],其主要目的是實現對障礙物的識別。
本次設計需要實現的避障功能有:對路障的識別、對陡坡的識別以及在特定情況下幫助循跡模塊識別路徑和確定車身位置,按其實現不同功能的需要,安置不同位置的傳感器。
4 軟件分析及硬件測試結果
4.1 主程序流程圖
主程序主要作用是對外部設備進行初始化,并等待游客投幣后,開始判斷投幣數量,確認完畢后選擇所去景點的路線,然后啟動語音模塊,帶游客去景點,到達景點解說完畢后自動回到起始點。本設計的主程序流程圖如圖3所示。
4.2 循跡模塊序流程圖
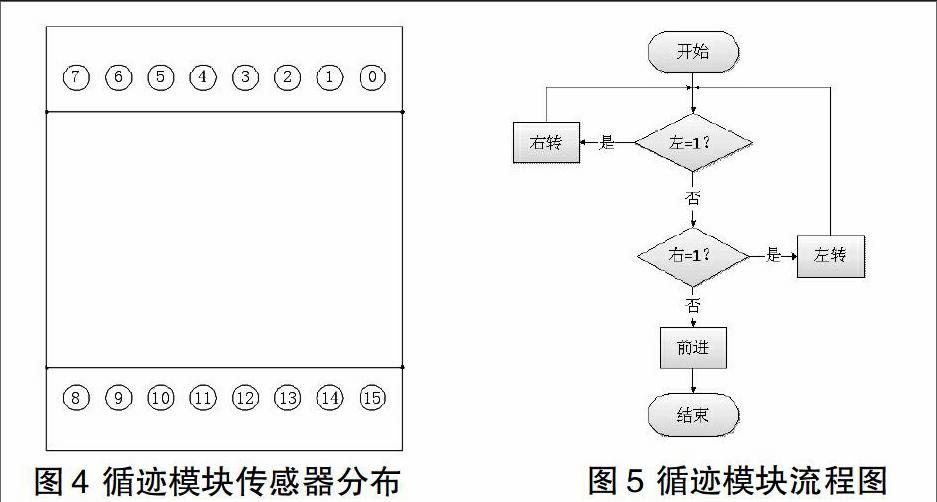
為了實現其識別線路的功能,2個循跡模塊分布于智能導游機器人底盤下方,為了循跡模塊編程所需,特將循跡模塊的光電傳感器定義為0至15的編號。如圖4所示為循跡傳感器分布圖。為了循跡模塊編程程序流程所需,設0至2的光敏傳感器響應向前右,5至7的光敏傳感器響應向前左,8至10的光敏傳感器響應向前左,13至15的光敏傳感器響應向后右,對于白色直線的循跡程序流程圖如圖5所示。
4.3 硬件測試結果及分析
該設計硬件主要實現了五個模塊功能,即主控模塊、穩壓模塊、循跡模塊、語音模塊與機器人移動的驅動。測試時主控模塊先在未通電時檢查芯片及其他外設焊接是否短路。通電后開始檢測是否可以下載程序,當程序可以成功下載則主控模塊就已經檢測完畢。硬件檢測表如表2所示。
5 結語
本設計研究的是類人型的模擬智能導游機器人系統,其采用STM32為主控芯片,通過模擬投幣模塊、語音模塊、循跡模塊、避障模塊等八個模塊完成了對機器人的智能控制,實現游客投幣確認后自動帶領其參觀景區,游客通過語音模塊實現與機器人的交流對話,并為游客進行解說服務。
參考文獻:
[1]楊志鵬.導游機器人的設計與實現[D].浙江大學,2010.
[2]Nilsson NJ.A mobile automation:An Application of Artificial Intelligence Techniques.Proc.of IJCAI reprinted in Autonomous Mobile Robots:Control[J].Planning and Architecture,1969.2(1):233-239.
[3]曹其新,張蕾.輪式自主移動機器人[M].上海交通大學出版社,2012-1-1.126-132.
[4]劉波江.玩轉機器人-巡線競速機器人的原理與制作[M].蘇鳳凰教育出版社,2014-07-01.98-101.
[5]俞云強.傳感器與檢測技術[M].高等教育出版社,2013-07-01.56-59.
