自動循跡避障尋光智能小車硬件系統設計
2016-10-13 03:56:42郭志超何愛龍
新鄉學院學報 2016年9期
郭志超,何愛龍
(新鄉學院 物理與電子工程學院,河南新鄉453003)
自動循跡避障尋光智能小車硬件系統設計
郭志超,何愛龍
(新鄉學院 物理與電子工程學院,河南新鄉453003)
設計并制作了以單片機為控制核心實現自動循跡、避障和尋光等功能的智能小車硬件系統。根據小車的多功能設計要求,使用了模塊化設計方法,以STC89C52單片機為中心來控制整個系統的運作,單片機根據各傳感器模塊反饋的信號來控制L293D電機驅動模塊實現小車前進、后退、轉向等運動。并搭建了小車實驗平臺,對小車功能實現、運動控制實際效果和小車運行的穩定性進行了觀察和分析,達到了預期的設計目的。
智能小車;循跡;避障;尋光
隨著現代電子信息及計算機科學的飛速發展,智能化設備無處不在地滲透于社會生產生活。同時,人類對科技及更好的生產生活體驗的追求也對智能化水平提出了更高的要求。2016年3月9日至15日在韓國首爾進行的韓國圍棋九段棋手李世石與谷歌公司的人工智能圍棋程序阿爾法圍棋AlphaGo之間的五番棋賽,最終人工智能阿爾法圍棋戰勝了李世石,機器的全面勝利使得“人工智能”再度成為一個熱門話題。正是在這樣的環境下,人工智能成為當下最尖端的科技研究熱點之一,其中智能小車,即輪式機器人,因具備完全主動或半主動的可移動性等獨特的優勢而成為主要的研究方向,也是人類生產生活中最常見的智能機器人形式[1-4]。
目前,由于任務要求和應用場景的需求以及軟硬件限制,實用的智能小車功能相對較為單一[5-7],但是隨著人工智能的深入研究和廣泛應用,社會對具備多種混合功能的小車的需求越來越迫切。
本文嘗試開發一個基于通用性平臺,采用模塊化設計,具有可移植性和通用性,并能根據設計好的程序實現目前最常用的循跡[8-9]、避障[10-11]、尋光功能的智能小車硬件系統。
1 小車系統設計總方案
根據設計要求,小車要在循跡、避障、尋光等不同模式下能檢測出外界環境信息并及時作出反應,能進行實時控制,具有控制效率、準確率和穩定性高等特點。圖1為系統的總體設計框圖。
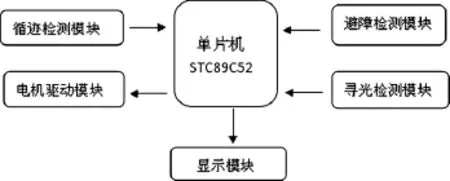
圖1 小車系統總體設計框圖
小車的控制核心為STC89C52單片機,在小車外圍布置以傳感器為核心的檢測模塊,動力和轉向由兩臺直流電機提供。小車通過外圍各傳感器模塊及時檢測外界物理特征信息,并轉換成電信號傳送到單片機,由單片機發送控制信號至電機驅動模塊,電機驅動電路采用H橋驅動模塊——L293D直流電機驅動模塊來控制小車前進、后退或轉向。
2 系統模塊
2.1主控制板
自動控制是實現整個系統的重點,本設計是一個復雜的多信號系統,采用的單片機需要滿足擅長處理多輸入量、程序存儲量大和有多個I/O口等要求,另外,主控制板集成了開關、電阻、顯示器、二極管等元件,故選擇ATMEL公司的單片機STC89C52為控制模塊核心。
2.2電機驅動模塊
智能小車的運動常用的驅動電機為直流電機和步進電機兩種。與步進電機相比,直流電機的位置控制精度不高,但直流電機電路簡單且易實現、調速性能優異。本系統采用兩個直流電動機,電機驅動芯片是L293D,并用脈沖寬度調制單片機PWM調速,以不同占空比的電脈沖方式控制電機的轉動。脈沖占空比決定控制電機轉速,表1為脈沖在125 Hz、PWM值不同時小車行駛速度和距離的關系。
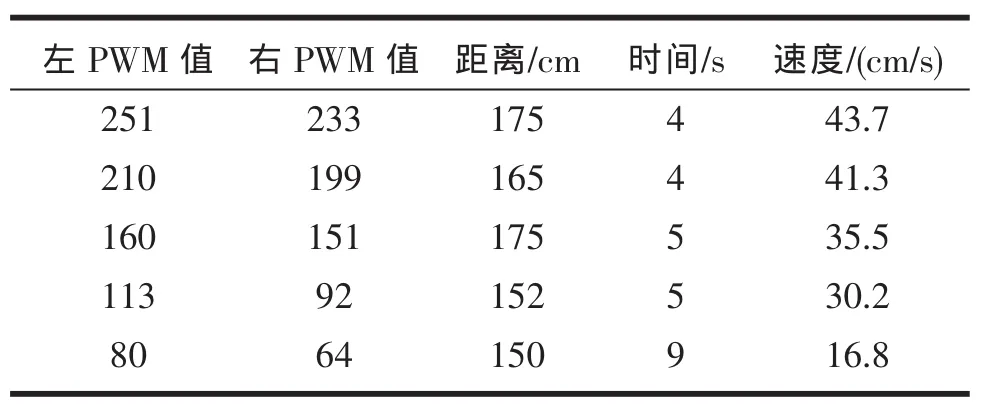
表1 PWM值不同時小車速度和距離的關系
電機控制電路用的是“H橋驅動電路”,由4個角的Q1、Q2、Q3和Q4三極管構成其4條垂直腿,中間為電機,當對角方向的2個三極管導通時,電機運轉。當2個三極管對的導通情況不同時,電流流通方向會是從左到右或從右到左,此時,電機轉向也會隨著電流方向改變而發生變化。電流從正極出發后經三極管Q1,然后通過中間的直流電機流向對角三極管Q4,這時電機會順時針轉動,相應,當電流從電源正極發出,依次通過三極管Q3、中間的電機、對角三極管Q2時,直流電機則會逆時針轉動。
2.3電源方案
以交流電經過直流穩壓后作為電源,需要將交流電源和小車之間用電線連接,這極大地影響了小車的靈活性,甚至直接干擾了小車正確的路徑選擇。
采用4節干電池串聯組成電池組提供6 V直流電源,為單片機主控制板、各傳感器模塊及電機驅動提供電力。這種電源方案提供的電流穩定,給小車平臺的負載壓力也小,各芯片和傳感模塊能夠穩定地工作。
2.4循跡模塊
循跡模塊采用紅外光電傳感器檢測路面標線。本系統設計的小車是在白色路面上跟循黑線運動:紅外線經白色路面時會反射回來,此時接收管則會接收到紅外信號;紅外線經黑色路面時則會被吸收掉而無法被接收。接收管接收的不同信號均會被傳輸到LM393電壓比較器,在電壓比較器中,接收電壓和比較電壓比較后產生“0”和“1”兩種信號,單片機接收到這兩種電平信號后可以判斷出是否檢測到黑色路線。為了更加精準地控制小車的前進方向,可以用3個相同的紅外光電傳感器均勻地裝在小車的最前端。通過這3個傳感器可以將路線偏離情況以“0”“1”兩個電平的形式實時地傳給單片機,經過單片機處理后傳給L293D電機驅動模塊來控制2個輪子的轉動,從而最終以特定的角度控制小車的運動方向。圖2為循跡功能實現流程示意圖。
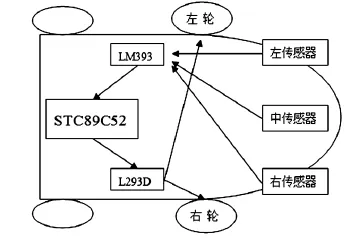
圖2 循跡功能實現流程圖
2.5避障模塊
目前主流的避障方案有超聲波避障方案和紅外避障方案兩種,超聲波傳播的方向性存在一定的誤差,而紅外避障傳感器使用穩定,探測穩定且成本較低,為了及時檢測小車前方的障礙物,可在小車的中間最前方設置紅外信號發射和接收二極管。當單片機接收到障礙物信息時,經過反射式光電傳感器電路,光信號轉換成電信號傳至主控制模塊,單片機會控制電機使小車先后退一段距離再左轉或右轉一定的角度,然后再前行,通過這樣一個過程可以使小車規避前方障礙物。紅外信號發射和接收實現避障原理如圖3所示,光電傳感器電路如圖4所示。
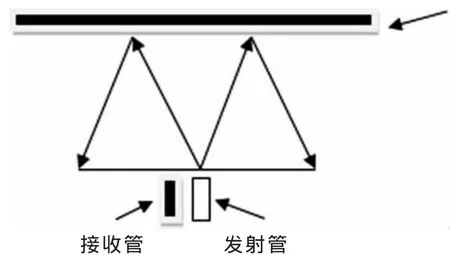
圖3 傳感器避障原理
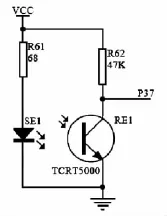
圖4 光電傳感器電路
2.6尋光模塊
尋光即小車尋找光源且在光源處停車,并可跟隨光源運動。尋光模塊電路的傳感器常用光敏電阻器。尋光模塊由兩部分構成:方向檢測模塊和光強檢測模塊。光敏電阻對稱放置在小車最上層的主控板兩側,它們采集到光信號后傳輸至電壓比較器LM393,再由邏輯電平CMOS傳到STC89C52,從而實現小車尋光運動控制。方向檢測模塊電路如圖5所示,RG1和RG2為左右兩個光敏電阻。光強檢測電路如圖6所示。
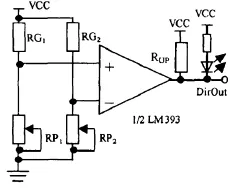
圖5 方向檢測模塊電路
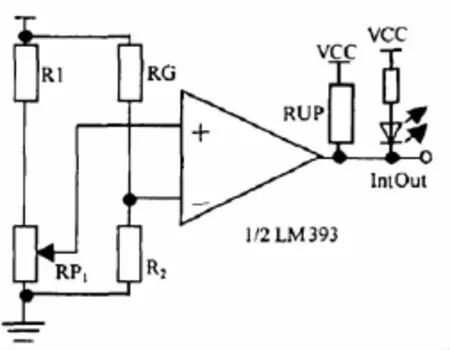
圖6 光強檢測電路
3 小車的制作與測試
根據要求,事先準備好必要的電子元器件、小車底盤電機等,進行電路安裝和焊接。小車電路原理圖如圖7所示。準備好色環電阻、二極管、芯片等元器件,從小到大排列好,并按照從小到大、從低到高的順序依次在電路板上焊接元件。在焊接時應注意:讀取好各種色環電阻的阻值,防止焊接錯誤;裝配光敏電阻時應將光敏電阻以適當的角度斜置,以更好地感應光照。在安裝上電池和插好排線后,小車安裝完成。實際效果如圖8所示
在小車硬件安裝好后將程序燒入單片機中,在不同的模式下測試其實際運行效果和穩定性。在多次測試并反復調節好各傳感器模塊電位器以調節小車的靈敏度后,小車最終能穩定地運行,并能實現循跡、避障、尋光等功能,達到了設計要求。
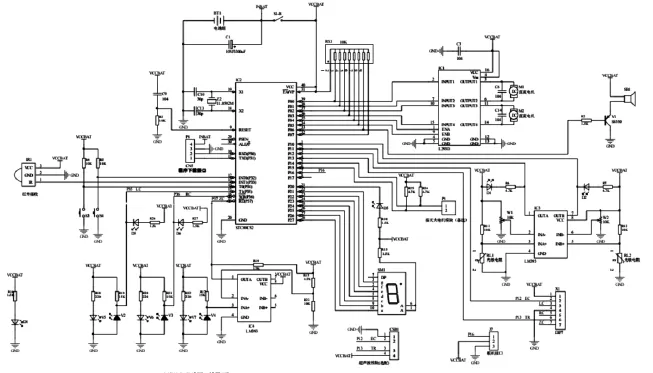
圖7 小車電路圖
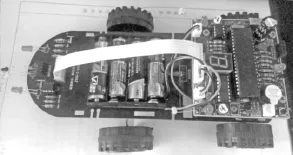
圖8 小車實際效果照片
4 結論
本文采用簡單易實現的輪式小車底盤作為平臺,搭載了以單片機為控制核心的主控制板、電源模塊、電機驅動模塊、循跡模塊等,引入多傳感器信息融合和電機控制技術來實現循跡、避障、尋光功能,完成了智能小車硬件系統的設計和制作。在小車安裝好后將程序燒入單片機中,經測試,該設計制作的小車實現了循跡、避障、尋光的功能,并達到了要求。
在該設計小車上,還可以加入自動滅火和在Android系統智能手機環境下實現藍牙對小車的手動控制等。本文的設計沒有實現這些功能,但在設計的小車上留下了相應的空間和端口,以便后續升級和完善這些更為復雜的功用。
[1]王寶萍.玩具智能小車控制系統的設計與實現[D].成都:電子科技大學,2012.
[2]程豪.基于信息融合技術的智能小車設計[D].南昌:南昌大學,2013.
[3]沈維佳.多傳感器小車的控制系統設計與研究[D].南京:南京理工大學,2015.
[4]MUKHTAR A,XIA L K,TANG T B.Vehicle Detection Techniques for Collision Avoidance Systems:A Review[J]. IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2318-2338.
[5]HAN G N,FU W P,WANG W.The Study of Intelligent Vehicle Navigation Path Based on Behavior Coordination of Particle Swarm[J].Computational Intelligence and Neuroscience,2016:6540807.
[6]TAGNE G,TALJ R,CHARARA A.Design and Validation of a Robust Immersion and Invariance Controller for the Lateral Dynamics of Intelligent Vehicles[J].Control Engineering Practice,2015,40:81-92.
[7]TIAN D X,ZHOU J S,WANG Y P.An Adaptive Vehicular Epidemic Routing Method Based on Attractor Selection Model[J].Ad Hoc Networks,2016,36:465-481.
[8]CHEEIN F A.Intelligent Sampling Technique for Path Tracking Controllers[J].IEEE Transactions on Control Systems Technology,2016,24(2):747-755.
[9] ZHU H J,FAN H H,YE F Y.A Novel Method for Moving Vehicle Tracking Based on Horizontal Edge Iidentification and Local Autocorrelation Images[J].2016,91(1):61-68.
[10]XIN Y,LIANG H W,MEI T.A New Dynamic Obstacle Collision Avoidance System for Autonomous Vehicles[J]. International Journal of Robotics&Automation,2015,30 (3):278-288.
[11]CAMPBELLl S,NAEEM W,IRWIN G W.A Review on Improving the Autonomy of Unmanned Surface Vehicles Through Intelligent Collision Avoidance Manoeuvres[J]. Annual Reviews in Control,2012,36(2):267-283.
【責任編輯黃艷芹】
Smart Car Hardware System Design for Automatic Tracking Obstacle Avoidance and Seeking Light
GUO Zhichao,HE Ailong
(College of Physics and Electronic Engineering,Xinxiang University,Xinxiang 453003,China)
In this paper a smart car hardware system was designed with the control of single chip as its core to realize tracking the pathway,avoiding obstacle and seeking light.Modular designs were used in order to achieve the vehicle's multi-function and the feasibility of different design plans was analyzed with the system taking STC89C52 as its core.According to the signals from different sensors,the single chip could control the car's movement,such as advance,retreat and veer.Meanwhile,the car's experimental platform was set up.It was used to observe and analyze car's implementations of the functions,real effect of motion control and the operation stability.The test results showed that the design achieved the desired purpose.
smart car;tracking the pathway;avoiding obstacle;seeking light
TP24;TP391
A
2095-7726(2016)09-0045-04
2016-06-03
河南省高校科技創新人才支持計劃項目(14HASTIT044);河南省教育廳科學技術研究重點項目(14A140030)
郭志超(1980-),男,河南汝州人,博士,研究方向:智能用電。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16