運動物體輪廓掃描系統的設計與實現
2016-09-20 09:20:16閃靜潔黃小平
新鄉學院學報 2016年3期
關鍵詞:系統
金 建,閃靜潔,黃小平
(安徽新華學院 電子通信工程學院,安徽 合肥230088)
運動物體輪廓掃描系統的設計與實現
金建,閃靜潔,黃小平
(安徽新華學院電子通信工程學院,安徽合肥230088)
設計了多模塊電路和MK60DN512最小系統,增加了對輪廓圖像的濾波和邊緣的處理算法,實現了運動物體輪廓的掃描和顯示。系統通過光電管組成的采集模塊采集數據,由MK60DN512單片機組成的主控模塊進行數據處理,處理后的數據通過無線發送模塊發送,由接收模塊接收并在液晶屏上實時顯示。測試結果表明,系統不僅能夠實時、清晰地捕捉兩個不同運動速度的物體的二維輪廓圖,而且能夠記錄和顯示物體運動的時間、速度等參數。
MK60DN512;光電管;無線模塊;輪廓;邊緣檢測
運動物體輪廓掃描在目標識別、運動檢測與跟蹤以及視頻壓縮等方面都起著重要作用,例如通過判別路口物體輪廓,可以區分行人、自行車和汽車。目前有很多種運動物體輪廓檢測方法,例如采用背景減法提取運動目標的輪廓,然后運用輪廓的邊界不變矩特征和形態學特征,構建一個輪廓特征向量的模型[1]。本文擬設計一套系統來實現數據的采集、傳送、處理和顯示,能通過圖像算法檢測出圖像的輪廓特征圖,同時計算出運動物體通過檢測設備的速度和時間,且需具有識別精度高、運行效率高、實時性好等特點。
1 總體設計方案
本系統總體上分為發射端和接收端,按模塊可以劃分為信息采集模塊、電源模塊、主控模塊、圖像顯示模塊、無線發送與接收模塊以及按鍵模塊。如圖1和圖2所示。
運動物體輪廓的檢測和顯示主要由兩部分組成:一部分是數據的采集、處理和發送,即傳感接收部分接收光電傳感器發來的數據,并傳給最小系統,最小系統根據數據和時間周期進行分析處理,并將結果傳送給手持設備;另一部分是發送端數據的接收,并根據有機發光二極管(Organic Light-Emitting Diode,OLED)顯示模塊的分辨率處理圖像信息,使物體輪廓能夠自適應地在OLED上顯示。同時,接收端也可以通過無線信號控制傳感器采集數據,并計算出物體的運動速度大小。
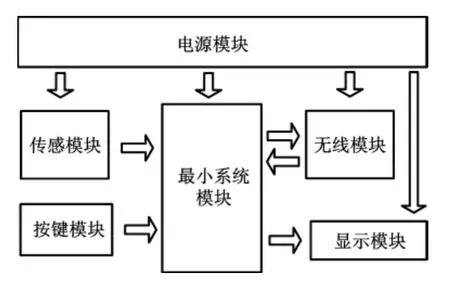
圖1 系統發射端
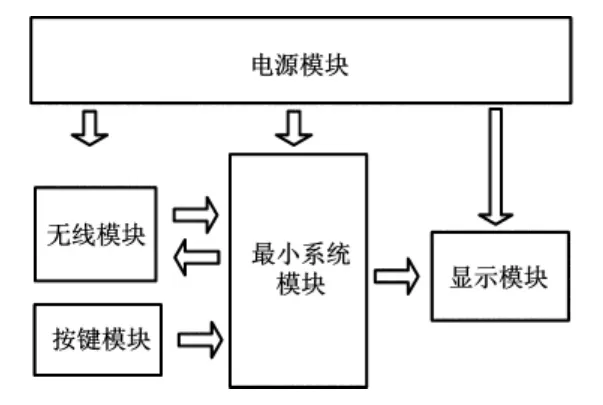
圖2 系統接收端
2 硬件設計與實現
2.1硬件系統構成
20只光電開關[2]單列均勻安裝在2 m高的木桿上,系統等時間間隔讀取這些光電開關的狀態,用于顯示圖像輪廓。另有兩只光電開關水平安置,用來計算物體通過的時間,進而計算出物體的運動速度和寬度。物體高度可由光電開關安裝位置直接讀出。顯示過程中,高度和寬度可根據高寬比進行調整,以選擇最合適的顯示比例,避免出現圖像過小或過大的情況。實物圖如圖3所示。

圖3 實物圖
2.2硬件單元電路
硬件系統由MK60D512最小系統板[3]、紅外光電開關傳感器模塊、無線2.4G NRF2401模塊[4]、電源電路模塊、按鍵電路模塊、OLED顯示電路模塊以及撥碼開關電路構成。
MK60DN512最小系統板通過計算兩個光電開關檢測到的數據得到運動物體的速度,并將數據通過無線2.4G NFR2401發給無線數據接收模塊。
本系統有20只E18-D80NK漫反射光電開關組成的單列稀疏的傳感器組,該傳感器組具有探測距離遠、受可見光干擾小、使用方便等特點。當經過的被檢測物體將光電開關發射出的光線反射到接收器后,光電開關就會產生開關信號,這些信號經過處理就可得到運動物體輪廓的數字信號。
NRF2401是一款新型單片射頻收發器件[5],內置頻率合成器、功率放大器、晶體振蕩器和調制器等功能模塊,并融合了增強型Shock Burst技術,其輸出功率和通信頻道可通過程序進行配置,具有自動應答和自動再發射功能,片內可自動生成報頭和CRC校驗碼,且與NRF24系列的其他射頻器件相兼容。
物體輪廓顯示部分采用OLED顯示屏,這種顯示屏具有可自發光、對比度高、體積小且分辨率高等優點。OLED顯示模塊提供了5種接口,本設計采用4線串行的SPI接口,由控制單元處理數據并驅動顯示屏,顯示出物體的大致輪廓和物體的運動速度。
電源采用7.2 V充電電池。為了獲取電路各部分所需電壓,使用了AMS1117-5V和AMS1117-3.3V兩種穩壓芯片。紅外光電開關的正常工作電流為100 mA,電路中共采用了22個紅外光電開關,且部分紅外光電開關需分開供電,故這部分使用了3片AMS1117-5V芯片供電,該芯片可輸出1 A電流,能夠滿足需要。AMS1117-3.3V芯片被用于給單片機最小系統板、OLED顯示模塊以及無線2.4G NRF2401模塊供電。
另外,系統的按鍵主要用來調節參數及實現功能的切換,而顯示模塊用來顯示物體運動軌跡。
2.3軟件設計
2.3.1數據采集與發送模塊
數據采集與發送模塊主要用來采集光電開關的數據和運動物體的輪廓數據,并將所采集的數據通過無線2.4G NRF2401模塊發送給數據接收模塊,流程如圖4所示。
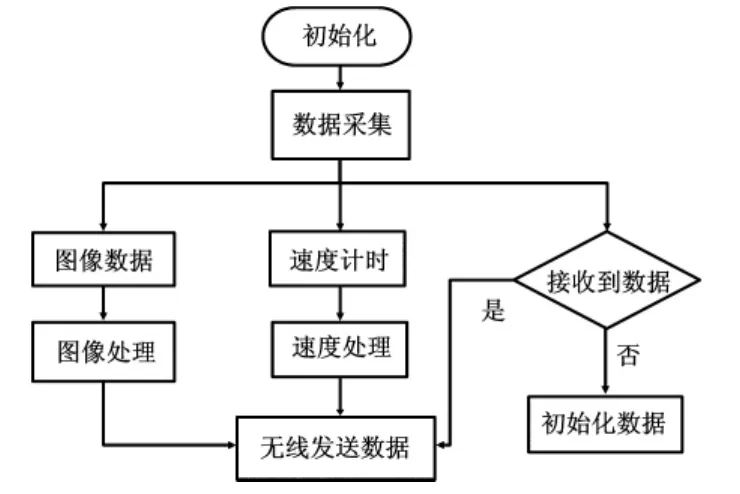
圖4 主控模塊流程圖
2.3.2數據接收模塊
接收模塊軟件流程圖如圖5所示。模塊主要接收和處理來自傳感器模塊采集的圖像等數據,并以32× 32像素顯示采集來的圖像,同時顯示運動物體的速度和時間。
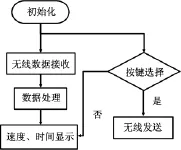
圖5 接收模塊流程圖
2.4數據處理
在處理組成物體輪廓的像素點的時候,采用像素點逐個繪制的處理方法易造成像素點丟失,無法繪制完整的物體輪廓。為了解決此問題,本文采用的方法是將同一列連續8個像素點同時寫入,這樣既不易丟失像素點,又不需要按位操作,提高了單片機的運行效率。
本文采用兩種輪廓顯示方案,這兩種方案均可通過按鍵調整顯示方式。兩種輪廓一種是外部線條,即通過一系列數據模擬得到運動物體的外邊界線;另一種是實心顯示,即顯示物體的投影圖。
在顯示物體輪廓時,會出現高度和寬度比例失真的情況,使物體輪廓在32×32像素的圖像中顯示偏大。這主要是由于20路光電管均勻分布在同一條直線上,因此在屏幕上顯示的高度范圍相對固定,而由計算得到的物體的寬度會隨著物體速度的變化而變化。本文根據物體實際的高、寬對圖像進行適當縮放,使物體輪廓可以在32×32像素的屏幕中以適當的大小進行顯示。數據的處理主要有以下幾部分。
(1)圖像平滑[6]。對圖像的邊緣進行處理[7],使圖像邊緣盡可能連續,看起來更平滑。
(2)圖像輪廓提取。運動物體運動經過傳感器時,傳感器被觸發并采集圖像數據,單片機開始計數。運動物體消失后,單片機計算時間并將運動的時間按比例劃分,同時,處理傳感器采集的數據,從中取出可信的數據,以此判斷物體的高和寬,得到20×20像素的圖像數據。
3 實驗測試
3.1實物測試
實物以固定速度1.5 m/s通過光電傳感器,實物模型及得到的顯示圖像如圖6所示。
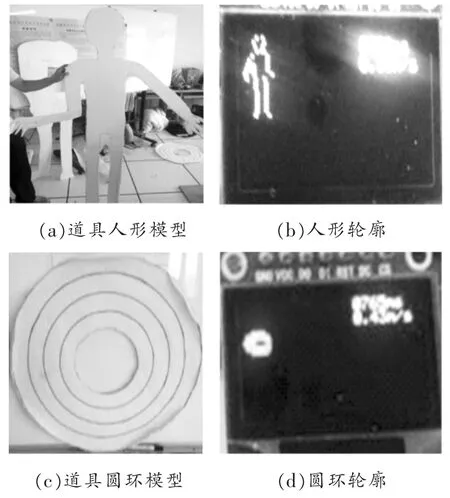
圖6 實物模型及顯示輪廓圖像
實驗分別選取了人體輪廓模型和環形模型進行測試,圖6(a)和(c)是模型原型,圖6(b)和(d)是掃描系統顯示的輪廓圖。分別對比這4幅圖,可以看出,道具模型和OLED顯示屏顯示的輪廓模型很相似,測試結果基本達到了設計要求。
3.2速度測試
使物體勻速通過掃描裝置,實際速度與系統測量速度如表1所示。由表1可知,所測速度與實際速度基本相等,實現了運動物體的測速功能。
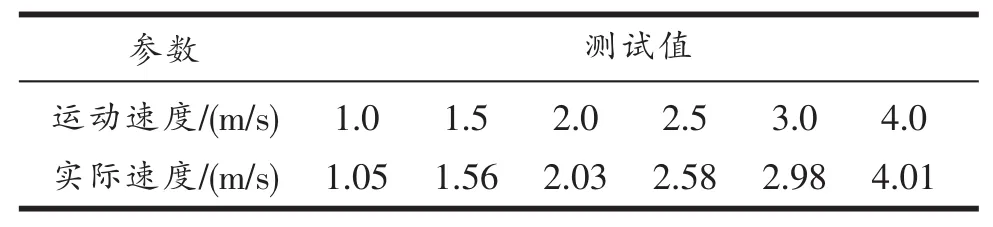
表1 速度測試參數
4 結束語
運動物體輪廓檢測系統實現了對1到2個速度為1~4 m/s運動物體的圖像輪廓顯示[8]的同時進行測速的功能。圖像采用32×32像素輸出,為便于觀察,添加了圖像放大、縮小的功能。系統不足之處是,當有兩個以上不同速度物體同時通過時,就無法有效區分,且在顯示運動速度較快的物體時,出現了高寬比失真的情況。系統處理能力還有待進一步提高。
[1]杜宇人.一種基于輪廓特征的運動目標識別方法[J].江蘇大學學報(自然科學版),2009(5):514-517.
[2]程融,劉進.基于光電管的智能車路徑識別研究[J].兵工自動化,2009(12):9-12.
[3]陳學青,陳永德.單片機開發最小系統實驗板[J].科技資訊,2008(31):26-26.
[4]李慶山,戴曙光,穆平安.nRF2401無線模塊在測控系統中的應用[J].電測與儀表,2006(8):58-59.
[5]曹立華.圖像處理及存儲顯示一體化系統設計[J].新媒體研究,2015(14):19-20.
[6]李俊生.一種圖像平滑處理方法的空域算法與頻域分析[J].常州工學院學報,2004(2):30-33.
[7]蔣愛花,邢濟收.圖像邊緣處理技術[J].科學技術與工程,2005(5):298-300.
[8]于成忠,朱駿,袁曉輝.基于背景差法的運動目標檢測[J].東南大學學報(自然科學版),2005(S2):159-161.
【責任編輯梅欣麗】
Design and Implementation of the Scanning System for Moving Object Contour
JIN Jian,SHAN Jingjie,HUANG Xiaoping
(School of Electronics and Communication Engineering,Anhui Xinhua University,Hefei 230088,China)
This paper designed a multi-module circuit and MK60DN512 minimum system,and added the algorithm processing for the filtering and the edge of the contour image.The system was composed of a photoelectric tube for collecting data,and then the main control module composed of MK60DN512 single chip was used to process data,and the data was transmitted to the receiving module through the wireless transmitting module and was displayed on the LCD screen in real time.Test showed that the contour map was not only able to capture the 2D contour of the moving objects in real time,but also record and display the time and speed of the moving object.
MK6ODN512;photoelectric tube;wireless module;contour;edge algorithm
TP212.9
A
2095-7726(2016)03-0057-04
2015-11-12
安徽省教育廳重點項目(KJ2014A097);國家大學生創新計劃(201412216011,201412216012)
金建(1985-),男,安徽合肥人,講師,碩士,研究方向:智能控制、圖像處理和嵌入式系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
