基于工廠監控的機器人重復定位精度測試系統
2016-09-20 09:20:14文瀟,高洪,游瑋
新鄉學院學報 2016年3期
文 瀟,高 洪,游 瑋
(1.安徽工程大學機械與汽車工程學院,安徽蕪湖241000;2.安徽埃夫特智能裝備有限公司,安徽 蕪湖241000)
基于工廠監控的機器人重復定位精度測試系統
文瀟1,2,高洪1,游瑋2
(1.安徽工程大學機械與汽車工程學院,安徽蕪湖241000;2.安徽埃夫特智能裝備有限公司,安徽蕪湖241000)
設計了一種成本低、操作簡便,能同時進行多工位測量,且能對數據進行一定處理的測試系統。該測試系統主要由檢測裝置、數據采集裝置以及數據處理終端組成。檢測裝置利用位移激光傳感器測量機器人末端的空間位置;數據采集裝置以串口方式將控制器與傳感器相連,并對數據進行初步處理;通過無線設備將數據傳輸到終端,基于OPC通信的標準協議,生成數據報表,顯示測量的實時曲線,得到最終的測量值,完成整個監控過程。
重復定位精度;激光傳感器;串口;無線通信;OPC
機器人的重復定位精度指機器人自身到達原先命令或示教位置的能力,其結果受控制系統、周圍環境、系統瞬態響應條件、部件磨損等影響,對其進行測量有助于優化機器人的結構和控制方式,提高機器人的作業能力。在工業機器人的制造生產中需要對成品機器人的重復定位精度進行檢測,目前大多采用激光跟蹤儀進行檢測。激光跟蹤儀測量精度較高,測量功能較多,但在測量過程中,需要測試人員實時跟蹤操作,實時記錄測量數據,且需要機器人末端與跟蹤儀準確對光,最終測量數據需要測試人員進行后期處理,故每次只能對單個工位的機器人測試。激光跟蹤儀設備成本較高,每年還要付一定的軟件服務費,該設備主要用于工業機器人研發檢測應用,不太適合工業機器人批量生產的檢測應用。針對上述問題,本文提出一種成本低、操作簡便,能同時進行多工位測量,且能對數據進行一定處理的測試系統。
1 系統組成
圖1是測試系統的示意圖。檢測裝置由固定在安裝支架上的三個激光傳感器組成,模擬空間三維坐標系,確定機器人的末端位置。采集信號經控制單元通過RS232的接口傳送給小型控制器。在測試現場有相關的觸摸屏裝置和無線設備,可遠程接收和查看數據。最終的數據終端對數據進行處理,并進行顯示和分析,同時配備相關輸出設備用于保存最終結果。采用傳統的測量方式,示教機器人到空間指定位置,并讓機器人多次反復運行指令位置,測量每次的位置值,進行相關記錄和處理。最終采集的數據通過無線設備遠程傳輸到終端服務器,可以在顯示屏幕上查看數據,觀察實時圖像,監控整個測量過程。
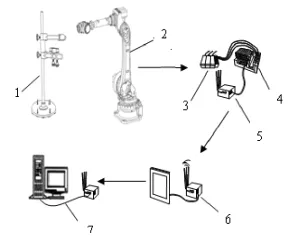
圖1 系統示意圖
2 系統設計
2.1檢測裝置的設計
本系統的檢測部分采用無接觸式測量方式,故選用激光傳感器測量機器人末端位置。該激光傳感器采用三角測量原理,由激光發射器將紅色可見激光投射到被測物體表面,經物體反射的激光通過接收鏡頭被內部的CMOS信號放大器件處理。當目標物體的位置發生變動時,CMOS上的光位置就會移動,通過檢測光位置,可測定目標物位置的變化量。同時,通過控制單元的數字電路處理光束在接收元件的位置,并通過微處理器分析,計算出相應的輸出值,在用戶設定的模擬量窗口內按比例輸出標準數據信號。本系統傳感器的分辨率為1 μm,重復度為2 μm,采集頻率為2 kHz。
固定位移傳感器的裝置為可調節支架。該支架可調節傳感器在空間的高度位置,支架底部裝有萬向球和可調腳杯,便于移動整個支架以及固定支架位置,以此測量機器人在空間移動到不同點的重復定位精度。傳感器安裝在支架上,使其投射光線在空間上相互異面垂直,可類比于空間的三維坐標系。測量時,通過控制機器人到達傳感器測試中心的范圍,確保三路光線投射到機器人的末端,由激光漫反射的原理可以測得機器人在空間三坐標軸的位置。
此外,為確保激光能投射在機器人末端,在機器人末端安裝有矩形塊狀負載。該負載有互異垂直的三面,可確保激光能垂直照射。但是,由于受不同照射表面的影響,傳感器的精度會呈現不同變化,故在負載表面安裝陶瓷測量片,確保測量時傳感器的精度達到最佳狀態。
2.2系統軟件設計
本系統采用的是B&R的X20系列緊湊型小型控制器。X20的任務周期可以達到200 μs,指令周期可以達到0.01 μs,且X20可以安裝在常用的導軌上,是完全的分布式I/O。同時還配備相應的通信接口,本系統采集數據所用通信方式為RS232串行通信。
本系統的通信方式與傳統傳感器檢測系統不同。傳統的傳感器數據采集多以0~5 V或4~20 mA的模擬量輸出,在對模擬信號的處理過程中,有計算誤差以及采集效率的影響,數據的精度不高。該系統的傳感器采用基恩士IL系列,采用開創性的串聯組網方式,三坐標數據可由其所配備的DL-RS1A通信單元進行輸出。其通信時通過外部裝置發送指令至該通信單元,通信單元自動返回響應值。
該傳輸通信規格為:通信速度為115 200 bit/s,數據長度為8 bit,無奇偶校驗位,停止位長度為1 bit。指令代碼為基于ASCⅡ碼的傳輸編碼,這些編碼包括讀指令、寫指令以及讀寫指令,目前數據的采集頻率為50 Hz。在數據采集程序中加入所需要的發送指令,讀取到相應的字符串數據,經過轉換得到最終數據。
2.2.1濾波處理
本系統對采集的數據做了中位值平均濾波處理,這是常用的數字濾波方式。該方式一般適用于對具有隨機干擾的信號進行濾波,能有效克服因偶然因素引起的波動干擾,對周期干擾有良好的抑制作用,對于偶然出現的脈沖性干擾,可消除由其引起的采樣值偏差,平滑度高,適用于高頻振蕩的系統。中位值平均濾波法相當于“中位值濾波法”+“算術平均濾波法”,在一個采樣周期內取N個點,去除最小值和最大值,對剩下的N-2個數據做算數平均,該結果作為一次采集的有效數據。
2.2.2通信過程
控制器的采集程序是一種狀態機的形式,采集過程如2圖所示。控制器需要向傳感器控制單元發出通信指令,即請求讀取數據。在發送過程中,需要打開串口并對串口參數進行初始化,控制器會提供足夠的內存空間,保存要發送的指令數據。數據準備完畢后,向串口寫入數據,然后釋放發送緩存,直至關閉串口。發送過程中的某個狀態出現異常時,控制器都會從當前狀態跳轉至錯誤處理狀態,此時將重新打開串口進行初始化,以保證通信的正常進行。接收數據的過程與發送過程類似。

圖2 通信流程
2.2.3數據傳輸
在圖1中,控制器和數據處理終端的數據傳輸采用無線的方式,這便是在終端接入了無線AP裝置,每個數據采集端配備了相應的無線客戶端。終端接入網絡通過AP裝置及客戶端進行組網,對相應設備配備相應的IP,從而通過IP定位指定的設備以及通信,如圖3所示。在現代化的工廠當中,無線設備的廣泛運用替代了傳統的布線方式,不僅節省了生產成本,也提高了生產效率。本系統引入該設備可提高其傳輸效率,簡化布線的復雜性,增強系統的操作便捷性。
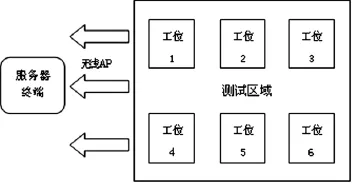
圖3 傳輸方式的示意圖
2.2.4上位機通信
在終端設備上需要進行數據計算、圖像顯示和數據存儲。這里我們采用相應的監控軟件,對采集的數據進行處理、分析和查詢。為了提高實時通信能力和簡化硬件連接,終端與控制器的通信方式采用OPC的方式。X20控制器支持OPC通信標準,可作為OPC服務器,而監控軟件則作為OPC客戶端軟件。配置完成后,在監控軟件中做相關的變量映射,即可測試通信情況。
本系統采用組態軟件制作上位機的監控畫面以及數據存儲。該軟件是基于C語言的開發環境,可以添加滿足需求的各種控件,并定義相關操作功能。這里主要是對三個方向的采集數據做實時曲線呈現,結合SQL技術保存數據,經過計算得出最終的測試結果,顯示在數據終端,方便現場人員操作與監控。
3 數據處理與系統測試實驗結果
3.1數據處理和計算
根據國家工業標準,需要對空間位置進行多次測量,一般選取30、50、100等組數,這里選用30組數據進行重復定位精度的計算。在測量時首先確定參考坐標系的原點,即三個傳感器的測量中心,此為最佳測量點。機器人的末端安裝有方形金屬測量塊,確保激光能照射到物體表面,采集到有效數據。示教時,移動機器人到空間5個不同位置,以單一方向接近每個位置,測試時所用的接近方向應與編程時的接近方向類同,并最終回到起始測量點。計算每個位姿的位置準確度AP。
位置重復性表示對同一指令位姿從同一方向重復響應n次后實到位置的一致程度。對某一位置,重復性可表示為以位置集群中心為球心的球半徑RP值,。式中,
3.2顯示和輸出
在數據終端,系統將PLC采集的數據實時顯示在屏幕上(如圖4所示),并記錄每次采集的數據,建立相關的數據庫保存采集樣本,最終將重復定位計算的結果輸出。
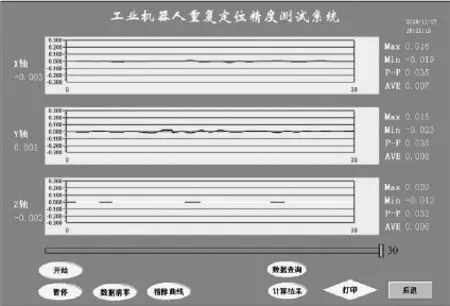
圖4 實時曲線圖
對某機型機器人進行30組的測量,計算結果見表1。
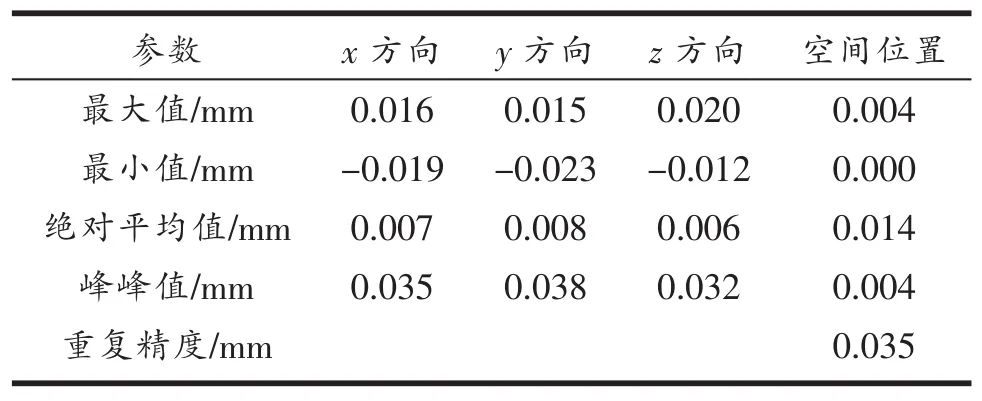
表1 重復定位精度的計算結果
機器人設計參數要求重復精度為±0.15 mm,該系統計算結果為0.035 mm,可以滿足要求,而且各個軸的數據變化范圍較小。
此外,將該系統所測數據和激光跟蹤儀的測量結果進行了對比。某機型機器人采用該系統對30點、50點、100點、150點的情況進行測量,其重復精度分別為0.035、0.043、0.048和0.056 mm,其平均值為0.045 5 mm。用激光跟蹤儀做了相同的重復精度測量,重復精度均值為0.031 4 mm。兩者的測量結果平均相差14.1 μm。由于激光跟蹤儀的精度可以達到0.1 μm,測量結果相對精確,而本系統的測量精度能達到2 μm,已能滿足工程需要。
4結束語
本測試系統對傳統各測試部件進行了優化,簡化了計算過程,其多次測量及數據分析的結果能滿足測試精度要求,符合工程需求。其成本低,操作方便,對測試人員專業技術要求不高,適用于機器人工廠的多工位測量,且無線設備的運用也方便技術人員遠程監控,對現代化工廠的自動化發展具有一定的促進作用。
[1]GB/T 12642—2013,工業機器人性能規范及其試驗方法[S].北京:中國標準出版社,2014.
[2]趙偉.基于激光跟蹤測量的機器人定位精度提高技術研究[D].杭州:浙江大學,2013.
[3]王世峰,趙馨,佟首峰,等.激光位移傳感器數據采集技術[J].傳感器與儀器儀表,2008,24(2):68-70.
[4]趙繼聰,周盼,秦魏.激光傳感器原理及其應用[J].科技致富向導,2011(9):102.
[5]鄧永剛.工業機器人重復定位精度與不確定度研究[D].天津:天津大學,2013.
[6]靳雷,李秋紅.基于OPC和組態技術的虛擬PLC監控系統研究[J].電氣傳動自動化,2014(6):239-242.
[7]周煒,廖文,田威.基于空間插值的工業機器人精度補償方法理論與試驗[J].機械工程學報,2013(3):42-48.
[8]TAO P Y,YANG G L,TOMIZUK M.A Sensor-based Approach for Error Compensation of Industrial Robotic Workcells[C]//IEEEInternationalConferenceon RoboticsandAutomation,RiverCantra,SaintPaul,Minnesota,USA,May 14-18,2012:5240-5245.
[9]BROSED F J,SANTOLARIA J,AGUILAR J J,et al. Laser Triangulation Sensor and Six Axes Anthropomorphic Robot Manipulator Modelling for the Measurement of Complex Geometry Products[J].Robotics and Computerintegrated Manufacturing,2012(28):660-671.
【責任編輯黃艷芹】
Testing System of Robot Repositioning Accuracy Based on Factory Monitoring
WEN Xiao1,2,GAO Hong1,YOU Wei2
(1.College of Mechanical and Automotive Engineering,Anhui Polytechnic University,Wuhu 241000,China;2.Anhui Efort Intelligent Equipment Co.Ltd,Wuhu 241000,China)
A cheaper and more easily operated testing system was designed to do multi-work position test and the definite data processing.It was mainly composed of detection device,data acquisition device and the data processing terminal.The position of the robot end effecter was measured by detection devices with laser displacement sensor;the controller,device of data acquisition,was connected to sensors through the serial port,conducting a preliminary data processing;Based on OPC communication standard protocols,the collected data was transmitted to the terminal through wireless devices;then data report was generated,real-time curve was displayed,and the final measured value was got.Finally,the whole monitoring process was complete.
repositioning accuracy;laser sensor;serial;wireless communication;OPC
TP242.2
A
2095-7726(2016)03-0042-04
2015-11-12
文瀟(1991-),男,江蘇淮安人,碩士研究生,研究方向:機器人性能檢測。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
