基于SOPC的微型無人機飛行控制系統設計
2016-09-08 09:23:54宋雋煒
傳感器與微系統 2016年9期
宋 宇, 宋雋煒
(長春工業大學 計算機科學與工程學院,吉林 長春 130012)
?
基于SOPC的微型無人機飛行控制系統設計
宋宇, 宋雋煒
(長春工業大學 計算機科學與工程學院,吉林 長春 130012)
針對無人機(UAV)飛控系統的發展要求,提出了一種基于可編程片上系統(SOPC)技術的設計方案,自頂向下地利用軟硬件協同設計方法實現整個過程的設計。主控芯片采用Cyclone II系列的EP2C8Q208C8N,進而設計系統的外圍電路;借助NIOS II軟件寫入程序實現對無人機的控制。與傳統的無人機控制系統相比,該系統適應了集成度高、功耗低、體積小的發展要求。懸停試飛,機體晃動小,且在外界干擾時能自動調整姿態,保持穩定飛行,具有較快的響應速度。
可編程片上系統; 飛行控制系統; 微型無人機
0 引 言
無人機(unmanned aerial vehicle,UAV)是一種自推動的飛行器,可以由操作員遙控或者自動駕駛。近年來,無人機得到了前所未有的發展[1]。從使用功能上看,已從單一偵查擴展到偵查監視、目標指示、電子對抗、無人作戰、預警、通信中繼、航空遙感、災情檢查、氣象監測等多種用途。隨著新型航空傳感器、傳動裝置,嵌入式控制和通信系統的發展以及機載零件的小型化,性能越來越好的小型、迷你、微型無人機將是未來的發展方向。
主控器所采用的微處理器會綜合考慮無人機飛行任務、性能指標、應用場合和資金預算,以及微電子技術、航空技術、算法復雜程度等因素。目前有基于工業級計算機、單片機、數字信號處理器(DSP)、ARM、現場可編程門陣列(FPGA),可編程片上系統(SOPC)這幾種處理器的無人機飛行控制系統[2]。工業控制計算機集成度高、資源豐富,但體積較大、功耗較高、系統復雜和造價高,一般多用于大型無人機;單片機穩定、價格低廉、開發簡單和嵌入性好,但不能夠勝任功能復雜、傳感器多的無人機;DSP的優點是控制運算,能將復雜的控制算法較好地實現,ARM在數據采集量大但運算量一般,需要實時控制輸出的場合更能發揮其優勢[3];FPGA除靈活性較大、接口豐富外,還可以內嵌一些特定的IP核構造出一個SOPC,通過硬件邏輯實現運算處理和控制算法,相比軟件方法能獲得更好的性能和效率[4]。因此,將SOPC技術應用于無人機飛行控制系統逐漸成為研究的熱點。
1 飛控系統總體設計
傳感器、飛行控制器和伺服機構是飛行控制系統的主要組成部分[5]。傳感器一般包括穩定姿態的三軸陀螺儀、測定加速度的三軸加速度計、測定磁場強度三軸磁阻儀、測定氣壓的氣壓高度計、測定飛行速度的空速傳感器以及GPS接收模塊和電壓電流計;飛行控制器由主控芯片和外圍電路組成;四旋翼的伺服機構是無刷直流電機。飛行控制系統通常還包括遙控接收機、無線收發模塊和常見的任務載荷。圖1是飛行控制系統原理圖[6]。
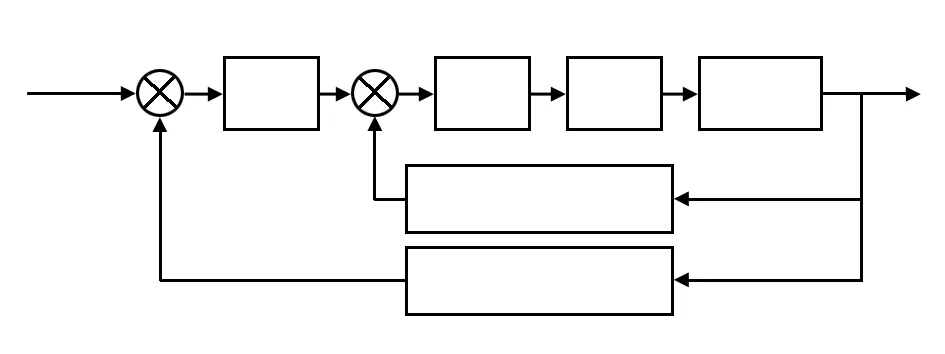
圖1 無人機飛行控制系統原理圖
飛行控制器根據遙控指令或預設程序的姿態和航跡參數,綜合傳感器采集得到的姿態和導航信息,然后運用姿態增穩和導航控制算法,控制伺服機構輸出,改變控制量大小,使飛行器趨于指令或程序設定的狀態飛行。姿態增穩控制回路主要實現飛行器按照既定的姿態穩定飛行;導航控制回路主要控制飛行器按照既定高度、速度、航向、航點(航跡)準確飛行。一般把姿態增穩控制回路作為內回路,導航控制回路作為外回路,這樣就構成一個完整的飛行控制系統,飛行控制系統總體設計方案如圖2所示。
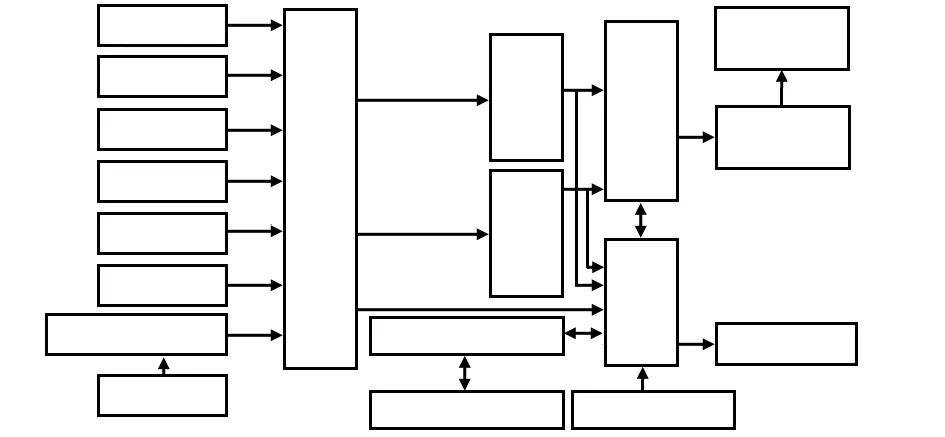
圖2 無人機飛行控制系統總體設計方案
2 系統硬件設計
無人機飛行控制系統硬件設計以飛行控制器為核心,而飛行控制器以FPGA芯片為核心,所以,整個系統設計都必須圍繞FPGA芯片,包含電源分配、接口電路設計、抗干擾措施等。
2.1電源分配
系統采用3節(3S)標準鋰電池(3.7 V)串聯構成的11.1 V總電源,總容量為2 200 mAh。其中無刷直流電機采用11.1 V供電,同時電調需要將低電壓的控制信號轉換成11.1 V的PWM信號。11.1 V電源經過穩壓器件78L05后得到5 V電壓給電調、遙控接收機、空速計、A/D轉換器、LED驅動電路和蜂鳴器驅動電路供電。5 V電壓經AMS1117—3.3 V穩壓得到3.3 V電壓,給FPGA芯片、時鐘復位電路、SDRAM存儲電路、Flash存儲電路、配置下載電路、陀螺儀和加速度計、磁強計、氣壓高度計、GPS模塊和無線數據傳輸模塊供電。3.3 V電壓經AMS1117—1.2 V穩壓得到1.2 V電壓,給FPGA芯片供電。
2.2接口電路設計
本系統采用Cyclone II系列的EP2C8Q208C8N FPGA芯片,該芯片總共有208個引腳,其中最大可用I/O端口182個,所以可以滿足各模塊接口的要求。
由于系統主控芯片FPGA采用3.3 V供電,在與5 V器件進行數據交換時,需要進行接口電平匹配,可以通過將5 V芯片的I/O端口接上拉電阻,將3.3 V的I/O端口串聯一電阻完成接口電壓兼容。
整個系統接口電路包括I2C、SPI、UART和普通I/O,其中磁強計HMC5883L采用I2C通信接口,采用SPI通信方式的有MIMU慣性傳感器MPU6000、氣壓高度計MS5611—01BA和A/D轉換器MAX186,GPS接收機NEO—7M和無線數傳模塊APC320采用UART通信方式,PPM信號輸入輸出接口、SDRAM存儲器接口、Flash存儲接口和LED狀態輸出接口使用普通I/O端口。FPGA芯片的電源接口、PLL模塊接口和配置下載接口構成FPGA最小系統接口電路。
2.3抗干擾措施
為使飛行控制系統各部分穩定可靠地運行,在設計飛行控制系統硬件時,應提高系統的抗干擾能力和電磁兼容性以適應系統內部環境和外部環境,采取如下措施[7]。
在電源輸入、輸出端加濾波電容,在每個集成電路芯片附近放置一個0.01 μF的瓷片電容。靠近各芯片的電源輸入端加上0.1 μF濾波電容,以消除電源的噪聲。元件在印刷電路板(PCB)上的布局位置要充分考慮電磁兼容性問題,即將模擬地與數字地分開,并通過電容進行耦合。導線要盡量粗而短、避免信號線與電源和地線交叉、避免長距離平行布線、過孔要少等。最后,采取外加鋁屏蔽罩的方法將系統與外界隔離。
3 系統軟件設計
飛行控制系統的軟件設計[8]采用模塊化思想,飛行控制器主要用來協調系統各單元間的工作,完成信息采集、處理、輸出的任務。
系統上電后,首先根據飛行管理模塊的狀態參數進行系統初始化,包括傳感器、系統參數、通信、端口等初始化。接下來系統查詢按鍵是否被按下,若按下了轉去執行相應的子程序;進而讀取傳感器測量的各種參數,包括速度、海拔、方位、飛機姿態,以及電池的一些參數等;在獲取了飛行姿態后,陀螺儀實時自動矯正飛機姿態。通過按鍵設定最大用電量,以便在電量不足時發出報警提示。飛機具有兩種駕駛模式,當接收機收到手動駕駛信號,飛機就在遙控的控制下飛行,當收到自動駕駛信號,飛機根據傳感器測的參數以及預先設置的航線自動飛行。主程序如圖3所示。
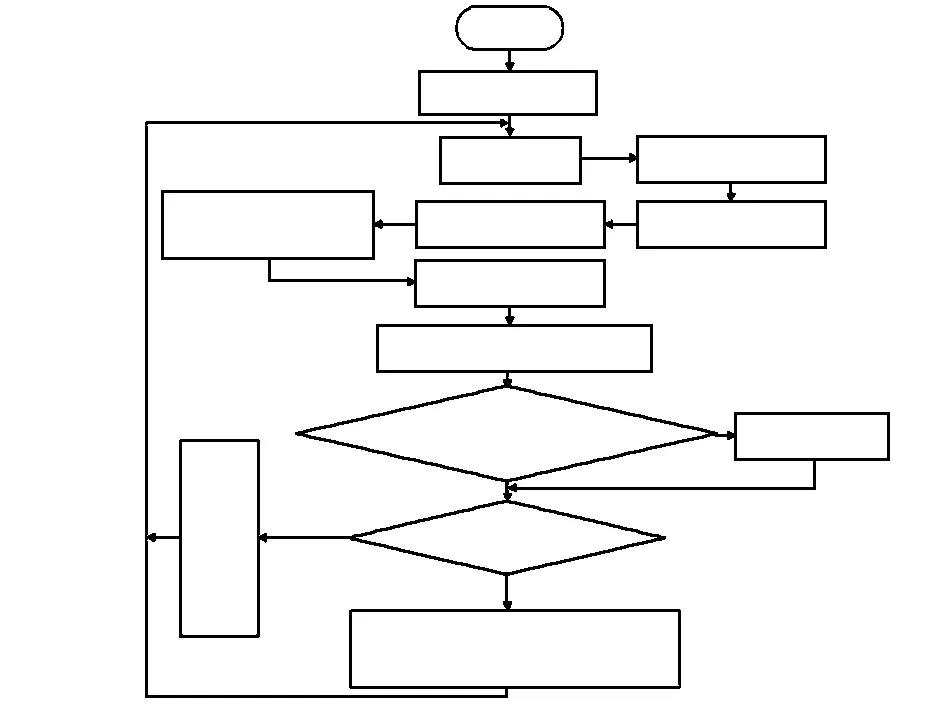
圖3 主程序流程圖
4 試 飛
通過實際飛行來測試設計的四旋翼飛行控制系統。遙控四旋翼飛行器,使其飛到合適的高度,觀測懸停時的姿態角的穩定度,圖4為四旋翼飛行器在懸停飛行時的橫滾角、俯仰角和偏航角輸出曲線[9]。
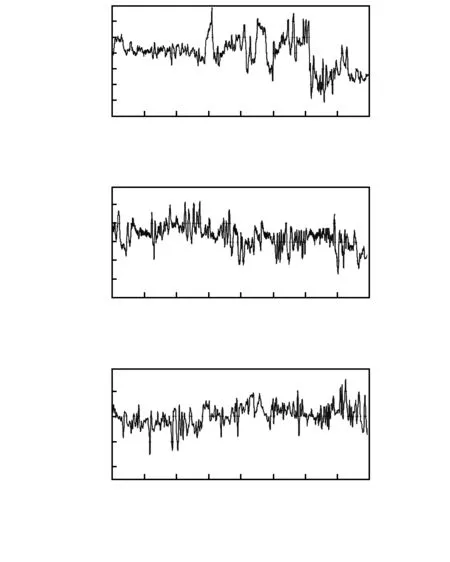
圖4 四旋翼飛行器懸停時輸出曲線
從四旋翼懸停飛行時的角度輸出曲線可見,橫滾角、俯仰角、偏航角誤差保持在±1°~±2°,懸停時機體晃動小,且在外界干擾時能自動調整回姿態,保持穩定飛行,系統具有較快的響應速度。
5 結束語
針對無人機飛控系統的發展要求,利用SOPC豐富的軟硬件資源和IP資源的優點,設計了一種新型的飛行控制器。通過多次的飛行試驗驗證表明:該系統在外界干擾時,能自動調整姿態,保持穩定飛行,具有較快的響應速度。該系統適應了飛控集成度高、功耗低、體積小的發展要求,為相關研究提供了技術參考。
[1]趙宇博,張小林,范力思.基于SOPC的飛行器控制系統的硬件設計[J].計算機測量與控制,2010(9):2112-2114.
[2]王昱輝,雷金奎,田力.基于SmartFusion的無人機飛行控制系統設計[J].現代電子技術,2012(10):129-131.
[3]陳遠炫,裴海龍,陳勇.小型無人機飛行控制系統的硬件設計與實現[J].計算機工程與設計,2010(10):2159-2162.
[4]劉鵬飛,賀繼林,黃斌.基于SOPC技術的無人機飛控系統的設計[J].航空科學技術,2007(3):39-41.
[5]劉根旺.飛行器控制系統設計與仿真實驗平臺的構建[J].實驗室研究與探索,2008(3):26-28.
[6]徐存東,趙東方,苗耀洲.一種新型無人機飛行控制系統的設計[J].儀表技術,2009(9):10-12.
[7]胡仁旭,裴海龍.小型無人機飛行控制系統的硬件實現[J].制造業自動化,2007,29(11):40-42,51.
[8]郭楊,翁新武, 基于AVR單片機的UAV飛行控制系統[J].長春工業大學學報:自然科學版,2013(2):40-42,51.
[9]江杰,豈偉楠.四旋翼飛行器建模與PID控制器設計[J].電子設計工程,2013(23):147-150.
宋雋煒,通訊作者,E—mail:1290391324@qq.com。
Design of micro UAV flight control system based on SOPC
SONG Yu, SONG Jun-wei
(College of Computer Science and Engineering,Changchun University of Technology,Changchun 130012,China)
Aiming at demand for development of unmanned aerial vehicle (UAV) flight control system,propose a design scheme based on SOPC technology.By using method of collaborative design of software and hardware,realize design of whole process from top to down.Use Cyclone II EP2C8Q208C8N as main control chip,and then design peripheral circuit of system.By writing procedures with NIOS II software to achieve control of the UAV.Compared with conventional UAV control system,the system adapts to development requirements of high integration,low power consumption, small size.Its body shakes slightly during hover flight and it can automatically adjust attitude and flight stably with a fast response when there is outside interference.
system on programmable chip(SOPC); flight control system; micro unmanned aerial vehicle (UAV)
10.13873/J.1000—9787(2016)09—0101—03
2015—11—05
TP 391.8
A
1000—9787(2016)09—0101—03
宋宇(1969-),男,吉林省長春人,教授,主要研究方向為嵌入式系統設計與研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
