灰色預測PID控制的氣缸運動系統設計*
2016-09-08 09:23:54郭陽寬祝連慶
傳感器與微系統 2016年9期
關鍵詞:系統
石 柱, 郭陽寬, 祝連慶, 劉 超
(北京信息科技大學 光電測試技術北京市重點實驗室 生物醫學檢測技術及儀器北京實驗室, 北京 100192)
?
灰色預測PID控制的氣缸運動系統設計*
石柱, 郭陽寬, 祝連慶, 劉超
(北京信息科技大學 光電測試技術北京市重點實驗室 生物醫學檢測技術及儀器北京實驗室, 北京 100192)
為了提高氣缸運行的平穩性,提出了一種基于灰色預測PID控制方法。給出了灰色預測PID控制結構,設計了灰色預測PID控制器,并在灰色預測理論所形成新誤差序列的基礎上,導出了校正PID參數表達式;接著,對輸出預測進行濾波處理,以消除預測值偏高的不足;然后,搭建了氣缸運動控制實驗系統并進行了測試實驗。結果表明:相對于常規PID控制,灰色預測PID控制的氣缸運行過程中速度超調量由22.1 %降至7.8 %;速度波動范圍由±6.2 %降至±2.1 %。采用灰色預測PID控制的氣缸運行過程中速度超調和振蕩問題有了明顯改善,滿足了大多數場合的應用要求。
灰色預測; 氣缸; 電磁閥; 速度控制
0 引 言
高精度的氣缸運動控制系統因其結構簡單,造價低廉,快速無污染,工作介質具有防燃、防爆、防電磁干擾等優點受到工業界的青睞。隨著現代工業對驅動越來越多地提出較高控制精度的要求,氣動系統的伺服技術得到快速發展,極大地改變了相關領域的面貌[1]。
近年來,在氣缸運動控制方面,有很多相關研究[2~5]。文獻[2]建立了一個基于高速電磁開關閥的直線氣缸速度控制系統的非線性模型,針對進、排氣回路提出了一種差時脈寬調制(DT—PWM)流量控制方案,并進行了仿真;文獻[3]研制了以壓力反饋式緩沖閥為核心的自適應緩沖系統,運用遺傳算法對緩沖閥參數進行了優化設計;文獻[4]設計了一種磁流變氣動速度控制系統,分析了系統的靜態和動態性能;文獻[5]對比例流量閥控缸的氣動系統建立了簡化的數學模型,針對該模型特點提出了雙層PID控制算法控制速度。這些研究有的給出了仿真研究,有的給出了試驗研究,有的已達到了很好的控制效果,但這些控制大多具有繁瑣的建模分析和控制器設計,算法復雜,不便于氣缸控制系統的推廣應用[6]。
PID控制具有算法簡單、參數易于整定、通用性強等優點,在伺服系統中得到較廣泛應用[4,5]。但是,常規PID控制氣缸運動時,要求建立準確的數學模型,這種方法過于繁瑣,模型不易得到,并且易于受到外界因素干擾,造成控制效果不佳[5]。灰色預測可根據少量系統信息得到系統發展規律并預測系統未來行為,無需掌握被控對象數學模型和控制經驗數據。本文將灰色預測理論與傳統控制理論相結合,設計了基于灰色預測PID控制的氣缸運動系統,根據灰色預測值對PID參數進行調節,以實現對整個系統的控制,有效改善了傳統PID的控制效果,獲得了很好的系統動態性能和魯棒性。
1 氣缸運動控制系統設計
1.1灰色預測PID控制結構
PID控制器是根據給定值和實際輸出值構成控制偏差,將偏差按比例、積分和微分通過線性組合構成控制量,對被控對象進行控制。數字PID控制器表達式為
(1)
灰色預測PID控制氣缸運動系統結構如圖1所示。
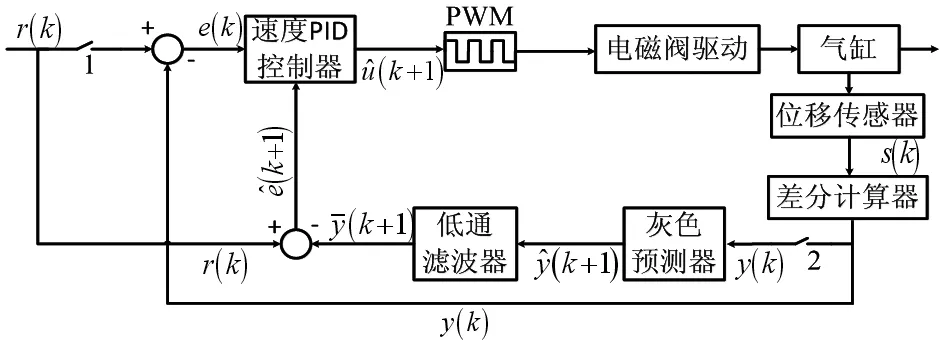
圖1 灰色預測PID控制氣缸運動系統結構

1.2灰色預測PID控制器
本文利用灰色預測理論,結合應用廣泛的PID控制,預測系統輸出狀態并實現PID參數的自校正,避免了像文獻[2]中建立復雜的數學模型,從而準確、有效且快速地實現氣缸運動控制。
灰色預測[7,8]利用有限的數據信息來預測將來的數據,預測模型是通過最小二乘方法,對原始序列進行累加生成運算,產生的結果用于建立微分等式來計算系數,從而得到新序列的模型預測值;再將此值通過累加生成逆運算得到其時域估計值。計算如下:

(2)
對原始序列進行GM(1,1)建模,得到氣缸運動控制的一階灰色微分方程
(3)

通過求解白化微分方程,得到灰色微分式(3)的解為
(4)
式中k=0,1,…,n。
再進行AGO逆運算以得到預測值
(5)
在灰色預測器前增加了一個差分計算器,將磁柵尺采集到的位移信息轉換為相應的速度信息,再進入灰色預測器。因為累加生成運算會使得預測值稍微偏高,因此,在灰色預測器后增加了一個一階數字低通濾波器

(6)
式中α在[0,1]區間內,本文選取α=0.6,它能夠有效地降低系統響應預測誤差。通過4個系統輸出滾動點y(k),y(k-1),y(k-2),y(k-3)和低通濾波器,由灰色預測器得到下一時刻系統輸出響應的預測值y(k+1)。根據給定值r(k),可獲得輸出預測誤差e(k+1)。由預測誤差及前3個時刻誤差組成的誤差序列,可用于自動調整PID控制器參數,能有效地加快上升速度,縮短穩定時間,降低超調量,而且能降低穩態誤差。PID參數調整公式如下
KP={1+ln[e(k+1)/e(k)]}KP0
(7)
KI={1+ln[e(k+1)]}KI0
(8)
KD=KD0/e(k+1)
(9)
式中KP,KI,KD分別是系統運行過程中實時更新的PID控制參數,KP0,KI0,KD0為初始PID控制器參數,可根據Ziegler—Nichols公式整定。
2 實驗系統構建與結果分析
2.1實驗系統構建
氣缸運動系統主要由PC機、主控制板、氣泵等組成,如圖2和圖3所示。
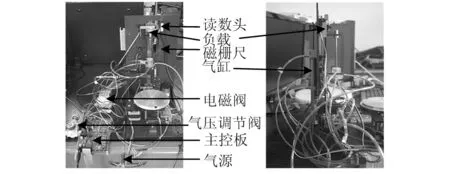
圖3 實驗系統照片
1)主控制板:微控制器采用STM32F103RCT6,最高72 MHz工作頻率,作為系統的下位機控制器;電磁閥采用MOS管驅動,結構簡單、響應迅速。
2)電磁閥C1和C2:日本SMC公司的二位五通電磁閥SYJ3143—5LZ,響應時間10 ms。
3)氣缸:臺灣亞德客雙腔單出桿氣缸,型號為PBR16X50—U。
4)磁柵尺:德國SIKO公司SIKO5000—0241,分辨率達0.001 mm,為系統位移傳感器。
2.2實驗結果分析
常規PID控制的響應曲線和基于灰色預測PID控制的響應曲線如圖4和圖5所示。
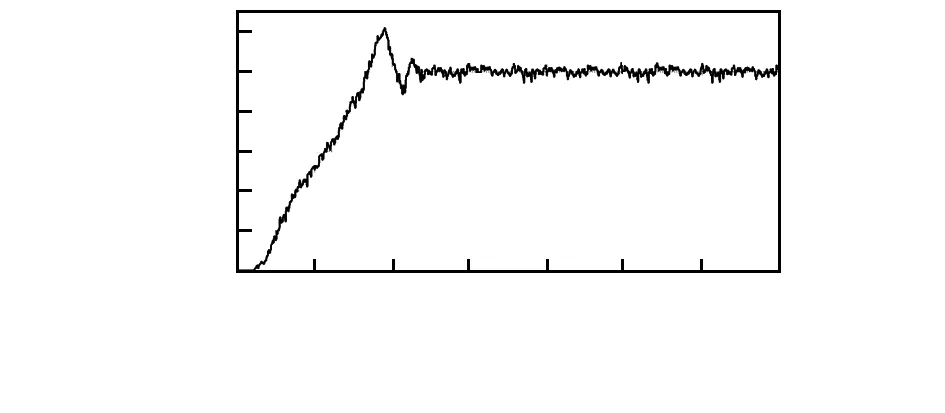
圖4 常規PID控制氣缸運動速度曲線
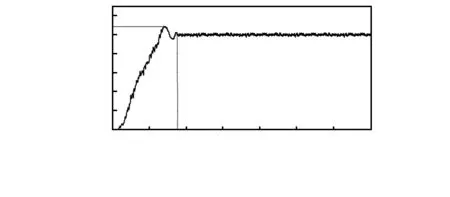
圖5 基于灰色預測PID控制氣缸運動速度曲線
可以看出:灰色預測PID控制的穩定時間(t)為342 ms,而常規PID的穩定時間為464 ms;在瞬態響應中,灰色預測PID控制的上升時間稍快于常規PID,超調量(y)從22.1 %降至7.8%;速度波動范圍從±6.2 %降至±2.1 %。
3 結 論
本文將灰色預測理論與傳統PID控制相結合,設計了基于灰色預測PID控制的氣缸運動系統。實驗結果表明:1)所建立的氣缸運動控制實驗平臺工作正常;2)采用灰色預測PID氣缸運動控制系統能有效地抑制超調量和擾動,加快穩定時間,提高效率。
[1]胡杰,許昌.高速開關閥的氣缸定位控制[J].機械設計與研究,2011(12):75-78.
[2]陳一飛,鄧燕.基于差時PWM氣體流量控制的氣缸開環速度控制研究[J].儀器儀表學報,2010,31(8):143-148.
[3]李哲,王祖溫,包鋼.基于遺傳算法的高速氣缸自適應緩沖系統優化設計[J].中國機械工程,2005,16(19):1722-1725.
[4]王炎玉,田玲.磁流變氣動速度控制系統的實驗研究[J].機床與液壓,2007,35(8):115-116.
[5]王海江,林廷圻.雙層PID氣動速度伺服控制[J].機床與液壓,2004(12):112-113,136.
[6]楊慶慶,徐科軍.變PWM占空比的壓電式閥門定位器控制方法[J].電子測量與儀器學報,2013,28(4):424-433.
[7]劉威,肖軍,翟春艷.基于改進灰色預測模型的自適應PID控制算法[J].科學技術與工程,2010,10(2):502-504.
[8]孫銀山,李平,袁藝,等.一種自調節灰色預測PID控制器[J].控制工程,2005,12(4):365- 367.
Design of pneumatic cylinder movement system based on gray prediction PID control*
SHI Zhu, GUO Yang-kuan, ZHU Lian-qing, LIU Chao
(Beijing Key Laboratory for Optoelectronic Measurement Technology,Beijing Laboratory for Biomedical Detection Technology and Instrument,Beijing Information Science and Technology University,Beijing 100192,China)
In order to enhance smoothness of operation of pneumatic cylinder,a method based on gray prediction PID control is proposed.Gray prediction PID control structure is presented and gray prediction PID controller is designed,and on the basis of new error series generated by grey prediction theory,correction PID parameters expression is derived;filtering processing of output prediction is carried out,to eliminate deficiency of prediction on the high side.Pneumatic cylinder motion control system is set up and testing experiments is conducted.Results show that,compared to conventional PID control,speed overshoot of pneumatic cylinder running controlled by gray prediction PID fall from 22.1 % to 7.8 %,and speed range from ±6.2 % to ±2.1 %.Speed overshoot and oscillation problems in operation process of pneumatic cylinder controlled by gray prediction PID have markedly improved, so it can meet application requirements of most occasions.
gray prediction; pneumatic cylinder; solenoid valve; speed control
10.13873/J.1000—9787(2016)09—0089—03
2015—12—10
北京市屬高等學校創新團隊建設項目(IDHT20130518);教育部“長江學者與創新團隊”發展計劃資助項目(IRT1212);北京市教委科研計劃資助項目(KM201511232006)
TP 273
B
1000—9787(2016)09—0089—03
石柱(1988-),男,河北廊坊人,碩士研究生,主要研究方向為精密儀器與機械、生物醫學檢測技術等方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
