橢球擬合的電子羅盤磁差補償
2016-09-08 09:23:52孫倩,付虹
傳感器與微系統 2016年9期
孫 倩, 付 虹
(長春工業大學 電氣與電子工程學院,吉林 長春 130012)
?
橢球擬合的電子羅盤磁差補償
孫倩, 付虹
(長春工業大學 電氣與電子工程學院,吉林 長春 130012)
對電子羅盤磁差補償的橢球擬合校準法進行深入研究,并分解為硬磁、軟磁、比例系數校準和未對準誤差校準,分別進行仿真分析,直觀給出各部分磁差對擬合后的橢球擬合影響。與工業級高精度HMR3300型電子指南針進行對比實驗,給出基于HMC5883L磁阻傳感器的自制電子羅盤經過橢球擬合校準后的導航精度。
橢球擬合; 電子羅盤; 磁補償
0 引 言
電子羅盤具有成本低、體積小和全天候工作等優勢,廣泛應用于汽車、航海、無人機和人體導航領域[1,2]。其原理是:依靠羅盤內部的磁傳感器測量的地磁矢量信息解算當前航向角。
但在實際應用中,背景磁場除純凈地磁場外,還有羅盤自身的硬磁干擾、軟磁干擾,嚴重影響了航向角的解算精度。而且磁傳感器的三個軸向在制作工藝上的不正交度、工作溫度對輸出比例系數的影響,都使獲取的地磁場信息有所偏差。臺灣大學的考巍文教授提出了一種橢圓擬合方法,但只能提高水平安置的磁傳感器的測量精度[3]。
本文提出了一種橢球擬合方法,將磁傳感器應用環境從二維水平面上升到三維立體空間,提高了電子羅盤的靈活性和傾斜使用時的精度。其原理是:利用背景磁場擬合后的橢球特性,通過將橢球恢復成球形的過程,使磁傳感器獲取的復雜背景場信息恢復為純凈地磁場,從而提高電子羅盤的精度[4~6]。
1 橢球擬合原理
橢球擬合法需要將磁傳感器及其基座同時在空中旋轉,保證采樣點盡量覆蓋所有姿態,所以適用于體積小且靈活的設備中。橢球擬合法可以校準羅盤自身的硬磁、軟磁干擾,三軸輸出的標度系數誤差[7]。
橢球擬合的校準公式為
(1)
式中x0,y0,z0為硬磁干擾補償值,a,b,c為比例系數補償值,d,e,f為軟磁干擾補償值,R為地磁矢量值。由上式可以看出,當磁傳感器工作在理想的純凈背景場下時,式(1)變為球形公式。
基座誤差和不正交度誤差:在應用中視為未對準誤差,進行統一校準。
基座誤差指在三軸磁傳感器坐標與羅盤基座坐標對準時造成的誤差;不正交度誤差指磁傳感器在制作時工藝上的三個軸向正交度誤差。
2 磁差仿真分析
為優化Matlab對橢球擬合系數的求解,將式(1)導出橢球擬合的矩陣形式[8,9]
x2=[xyz-xy-xz-yz-y2-z21]
(2)
Wn×1=[H]n×6·X6×1
(3)
X=[HTH]-1HT·w
(4)
得出
(5)
(6)
(7)
式中MOSx,MOSy,MOSz分別為三個軸向的硬磁干擾,MSCx,MSCy,MSCz分別為刻度系數。
2.1硬磁干擾
設硬磁干擾系數為:MOSx=32,MOSy=-155,MOSz=264。
由圖1可以看出,羅盤內部的硬磁干擾使擬合后的橢球球心偏離原點。
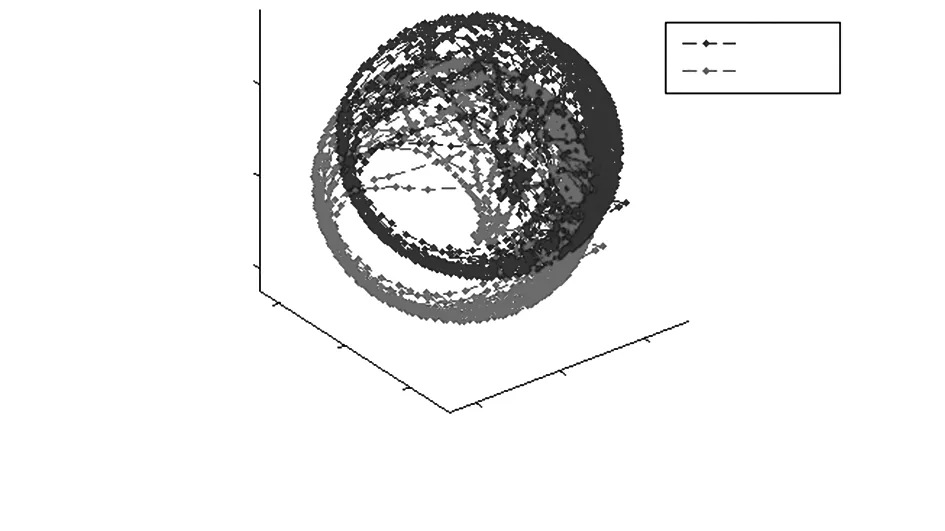
圖1 硬磁干擾對橢球影響
2.2比例因數誤差
設比例因數系數為:MSCx=200,MSCy=300,MSCz=400。
圖2可以看出,由于器件出場特性、工作溫度等原因,磁傳感器三軸的敏感系數具有各異的誤差,使輸出擬合后變成橢球。
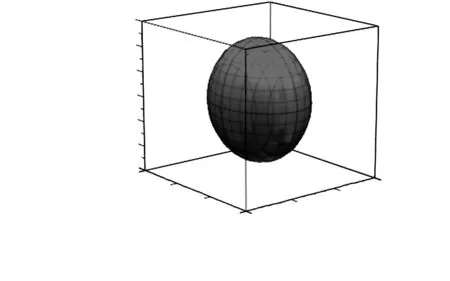
圖2 比例因數對橢球影響
這種誤差的校準方法是將橢球歸一化處理如圖3,處理公式如下
(8)
使橢球擬合方程變為
xx2+yy2+zz2=1
(9)
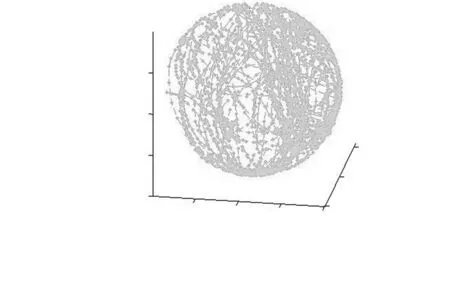
圖3 橢球的歸一化處理
2.3軟磁干擾誤差
施加軟磁干擾系數:d=50 000,e=300,f=50 000。
圖4可以看出,羅盤內部的軟磁是擬合后的橢球發生傾斜。在磁環境較復雜的情況下對羅盤軟磁校準進行采樣時需要注意,保證羅盤始終以磁傳感器原點旋轉。因為外部的硬磁干擾同樣會對羅盤三軸施加周期性變化的磁場,在橢球擬合中對軟磁補償系數的求解造成很大誤差。
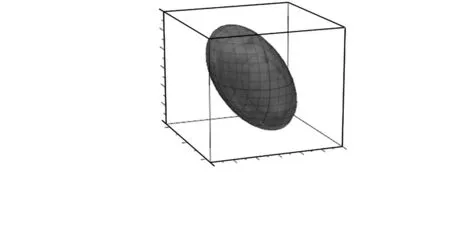
圖4 軟磁干擾對橢球影響
2.4未對準誤差
如第1節所述,這部分校準包括磁敏感器的三軸不正交度校準和磁傳感器坐標與基座坐標系的對齊校準。校準方法是在羅盤經過硬磁補償、軟磁補償、歸一化處理后,再將羅盤磁傳感器水平放置,分別繞x,y,z軸旋轉一周,如果磁敏感器三軸相互正交且與基座坐標系對齊,則三軸的歸一化平方和等于1,且分別繞單軸旋轉時,該軸的輸出不變。
不正交系數擬合公式
(10)
(11)
X=[HTH]-1HT·w
(12)
HMC5883在本實驗條件下的未對準誤差為
Mm=[RxRyRz]
(13)
3 航向角解算實驗
實驗以三軸磁傳感器HMC5883L為校準對象,與高精度的HMR3300型指南針對比偏航角的精度。
HMR3300型高精度三維電子指南針具有自帶校準功能,分辨率為0.1°,精度為0.5°。HMC5883L型三軸磁阻傳感器的分辨率為500 nT,本實驗環境下的總場約55 000 nT,則水平偏航角的分辨率為0.5°(=arctan(500/55 000))。
圖5為HMR3000型高精度三維電子指南針與HMC5883L放置在同一無磁轉臺水平旋轉1周后的偏航角解算結果,HMR3000與校準后的HMC5883L解算結果在當前尺度下基本重合。
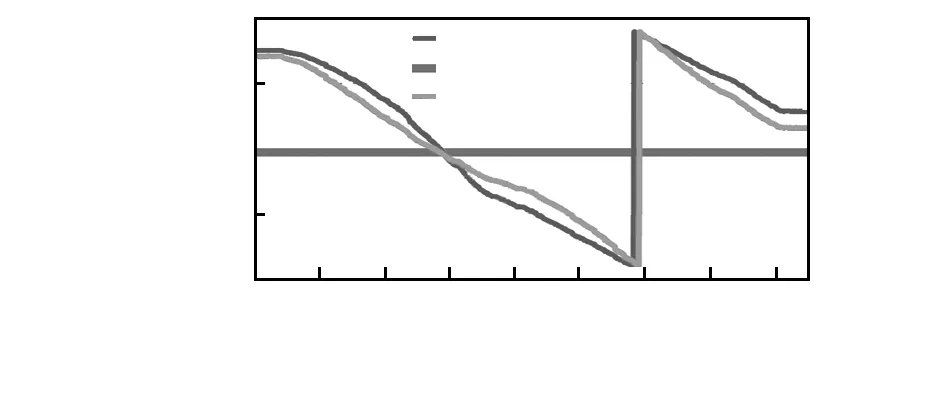
圖5 HMR3300與HMC5883L電子羅盤校準前后的精度對比
圖6為磁差校準后的HMC5883L與HMR3300的偏航角解算結果對比,精度誤差約為±0.7°。
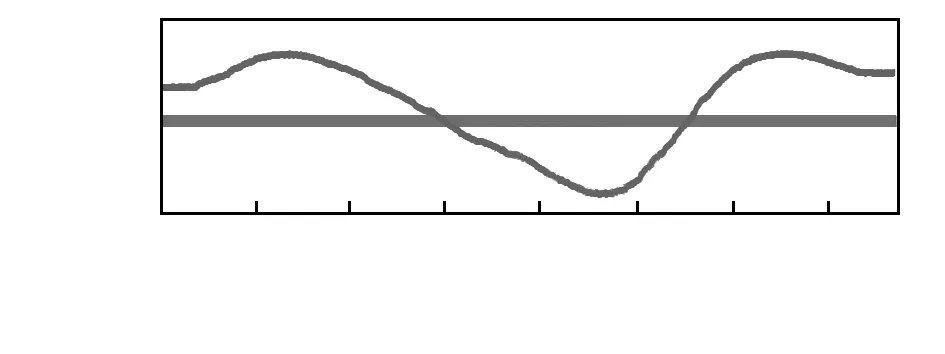
圖6 HMR3300與校準后的HMC5883L的精度對比
4 結 論
本文對電子羅盤的誤差來源進行深入研究,并原理上分解橢球擬合校準方法,分別對硬磁校準、軟磁校準、比例系數校準、未對準誤差校準部分進行了直觀的仿真分析。最后采用高精度HMR3300型電子指南針與自制的HMC5883L型傳感器進行對比實驗,由實驗結果可以看出:在當前的磁傳感器分辨率下,精度誤差為±0.7°。
[1]FangJ,SunH,CaoJ,etal.Anovelcalibrationmethodofmagneticcompassbasedonellipsoidfitting[J].IEEETransactionsonInstrumentation&Measurement,2011,60(6):2053-2061.
[2]劉詩斌,馮曉毅,李宏.基于橢圓假設的電子羅盤誤差補償方法[J].傳感器與微系統,2002,21(10):28-30.
[3]KaoWW,TsaiCL.Adaptiveandlearningcalibrationofmagne-ticcompass[J].MeasurementScience&Technology,2006,17(11):3073-3082.
[4]邵婷婷,馬建倉,胡士峰,等.電子羅盤的傾斜及羅差補償算法研究[J].傳感技術學報,2007,20(6):1335-1337.
[5]嚴鵬飛.弱磁傳感器電子羅盤的軟硬磁干擾的矯正[J].電子制作,2015 (2):1-2.
[6]張瑋,王冬青.三維磁阻式電子羅盤的設計與實現[J].工業控制計算機,2014,27(3):119-120.
[7]Hemerly E M,Coelho F A A.Explicit solution for magnetometer calibration[J].IEEE Transactions on Instrumentation & Mea-surement,2014,63(8):2093-2095.
[8]Grammalidis N,Strintzis M G.Head detection and tracking by 2D and 3D ellipsoid fitting[C]∥2000 Proceedings of Computer Graphics International,IEEE,2000:221-226.
[9]Li Q,Griffiths J G.Least squares ellipsoid specific fitting[C]∥Geometric Modeling & Processing,IEEE Computer Society,2004:335.
Research on magnetic variation compensation of electronic compass based on ellipsoid fitting
SUN Qian, FU Hong
(College of Electrical & Electronic Engineering,Changchun University of Technology,Changchun 130012,China)
Ellipsoid fitting calibration method used for magnetic compensation on electronic compass is researched,decompose the algorithm into four parts which are hard-magnetic,soft-magnetic,scale coefficient and misalignment error calibration,and simulate and analyze effect of magnetic error of each part on ellpsoid fitting is proposed vividly.Use HMR3300,navigation precision of electronic compass is given,to compare with HMC5883L which is manufactured in the lab,and the result is satisfied.
ellipsoid fitting; electronic compass; magnetic compensation
10.13873/J.1000—9787(2016)09—0039—03
2015—11—10
TP 212.1
A
1000—9787(2016)09—0039—03
孫倩(1990-),女,吉林省吉林人,碩士研究生,主要研究方向為弱信號檢測。
