基于神經網絡的衛星鐘差預報及誤差控制
2016-08-26 02:10:17朱陵鳳李超劉利李曉杰郭睿
全球定位系統 2016年3期
關鍵詞:模型
朱陵鳳,李超,劉利,李曉杰,郭睿
(北京衛星導航中心,北京 100094)
?
基于神經網絡的衛星鐘差預報及誤差控制
朱陵鳳,李超,劉利,李曉杰,郭睿
(北京衛星導航中心,北京 100094)
針對衛星鐘差預報誤差隨時間不斷變大問題,提出了基于BP神經網絡的衛星鐘差預報誤差控制方法。該方法利用神經網絡強大的非線性映射能力,對歷史時段鐘差擬合殘差及當前時段鐘差預報誤差進行訓練,得到擬合殘差與預報誤差的映射關系,據此根據當前時段的擬合殘差預測未來時段的預報誤差,將其補償到未來時段鐘差預報鐘差結果中去,以實現未來時段衛星鐘差預報誤差的有效控制。為驗證該方法的可行性和有效性,利用實測的COMPASS導航衛星鐘差數據進行鐘差預報精度分析,結果表明,神經網絡可有效控制衛星鐘差預報誤差、提高衛星鐘差預報精度。
神經網絡;衛星鐘差;COMPASS;預報
0 引 言
受限于國土地理分布的限制,區域導航系統的地面部分采用區域監測網,非地球同步軌道的導航衛星會運行到地面監測站的不可視弧段內,此時,導航衛星星載原子鐘與系統時間之間的同步只能由衛星鐘自己維持,因此,必須對導航衛星鐘差進行預報[1]。鑒于原子鐘物理特性與二階多項式的吻合性,通常使用二階多項式模型進行衛星鐘差預報,然而,在軌運行的導航衛星星載原子鐘頻率高且非常敏感,極易受到太空環境及其自身因素的影響,因此,傳統的二階多項式模型很難預測其細致的變化規律,導致預報誤差隨預報時間不斷變大,不能滿足實際應用中的精度要求。
近年來,部分學者將灰色系統和Kalman濾波器[2]用于衛星鐘差預報,取得了一些進展。灰色系統在數據量少的情況下預報優勢明顯,但是不同的灰色系統模型指數系數對預報精度有著非常大的影響,傳統的灰色系統模型指數系數通常固定為一個常量,容易導致很大的誤差,甚至是錯誤[3];Kalman模型中只考慮了鐘差的確定性部分,將隨機性部分簡單視為白噪聲處理,一定程度上降低了衛星鐘差預報精度。
神經網絡的原理是通過非線性基函數的線性組合實現從輸入空間到輸出空間的非線性轉換,可逼近任意非線性映射,突破了建立參數模型的傳統做法,在非線性預測方面優勢明顯。空間復雜運行環境下的衛星,其鐘差是一類非線性較強的時間序列,對鐘差序列進行預報,實質上就是找出從輸入空間到輸出空間的非線性映射關系。因此,神經網絡特別適合于類似于鐘差序列的非線性時間序列的預報[4]。然而,神經網絡具有易陷入局部極小點和訓練性能低等弊端,針對這些弊端,文獻[5]利用RBF神經網絡進行衛星鐘差預報,達到了學習訓練速度和收斂速度都很快的效果,但是預估精度低于傳統二次多項式模型;文獻[6]提出了基于一次差方法的小波神經網絡鐘差預報算法,使得模型結構簡單,預報精度高于常用的二次多項式模型和灰色模型;文獻[7]采用“滑動窗”劃分數據,利用神經網絡預測小波分解和去噪后的鐘差序列各層系數,更精確地把握鐘差序列復雜細致的變化規律,從而更好地逼近鐘差序列,得到了較好的預報精度。
本文以多項式模型為基礎,采用歷史鐘差多項式模型擬合殘差和當前鐘差多項式模型預報誤差作為訓練樣本,訓練得出二者間的映射關系,利用映射關系對當前鐘差多項式模型擬合殘差進行預測,得到未來時刻的多項式模型預報誤差,將其補償到未來時刻的多項式模型預報鐘差中去。為了準確探測出不同時長的鐘差變化規律,在訓練樣本的時長選擇中采用了樣本資料與預報等時長的策略,并對訓練樣本進行歸一化處理以提高訓練性能,取得了很好的效果。
1 訓練樣本準備
設t1,t2,…,tn歷史時刻對應的鐘差為x1,x2,…,xn,鐘差的二階多項式擬合模型可表示為
(1)
式中: a0、a1和a2為擬合系數; ei為模型誤差。
上式可表示為矩陣形式
X=Ha+e,
(2)
式中: X為n維觀測向量; a為3維未知參數向量; e為n維誤差向量; H為3n維設計矩陣,可表示為
(3)

(4)

(i=1,2,…,n).
(5)


(i=n+1,n+2,…,n+m).
(6)
若已知tn+1,tn+2,…,tn+m時刻的鐘差為xn+1,xn+2,…,xn+m,由下式可得鐘差預報誤差序列ΔXn+1,ΔXn+2,…,ΔXn+m

(i=n+1,n+2,…,n+m).
(7)
2 神經網絡建模
神經網絡作為一種新興的建模工具,特點在于處理非線性、高維性的問題時不需要準確知道輸入輸出函數的結構參數,只需通過訓練來掌握它們之間的內在關系,即可獲得正確的映射關系,其優勢在于不確定性關系的控制和預測。
鑒于這些優勢,利用BP神經網絡對歷史鐘差擬合殘差和鐘差預報誤差進行建模。BP神經網絡是一種多層網絡的“逆推”學習算法,由輸入層、輸出層和中間層(隱層)組成。隱層可以有多個。每一層包含若干個神經元,同一層中的神經元彼此不相連,不同層間的神經元可有相連。其結構如圖1所示。
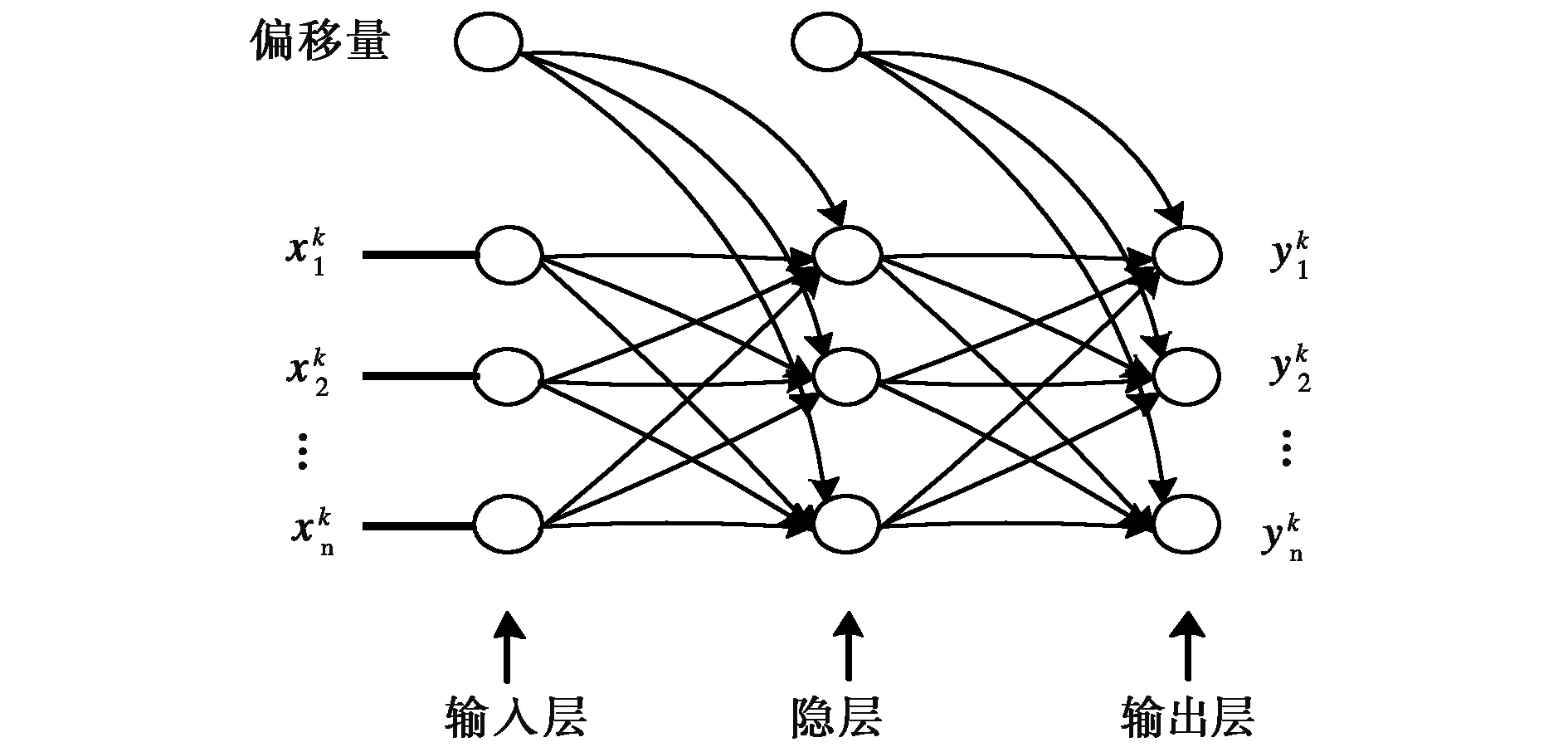
圖1 BP神經網絡的基本結構圖
BP神經網絡的基本單位是神經元,神經元接收輸入信號,通過激活函數輸出信息。為了表現出網絡的非線性特性,隱層節點的傳遞函數往往為非線性的。較常用的非線性激活函數為對數雙曲線函數和正切雙曲線函數。對于輸出層,可以采用線性激活函數,也可采用前兩種非線性的激活函數。值得注意的是,如果輸出層使用非線性激活函數,那么網絡的輸出將被限制在一定的范圍內;如果輸出層使用線性激活函數,那么網絡的輸出的范圍將相對較大。
考慮到鐘差長期預報情況下,訓練樣本中的預報誤差在數值上遠大于歷史鐘差擬合殘差,為方便數據處理和提高訓練性能,對訓練樣本進行歸一化處理,將兩者除以各自的最大值,如此二者的變化范圍都統一在±1之間,再對二者進行建模。

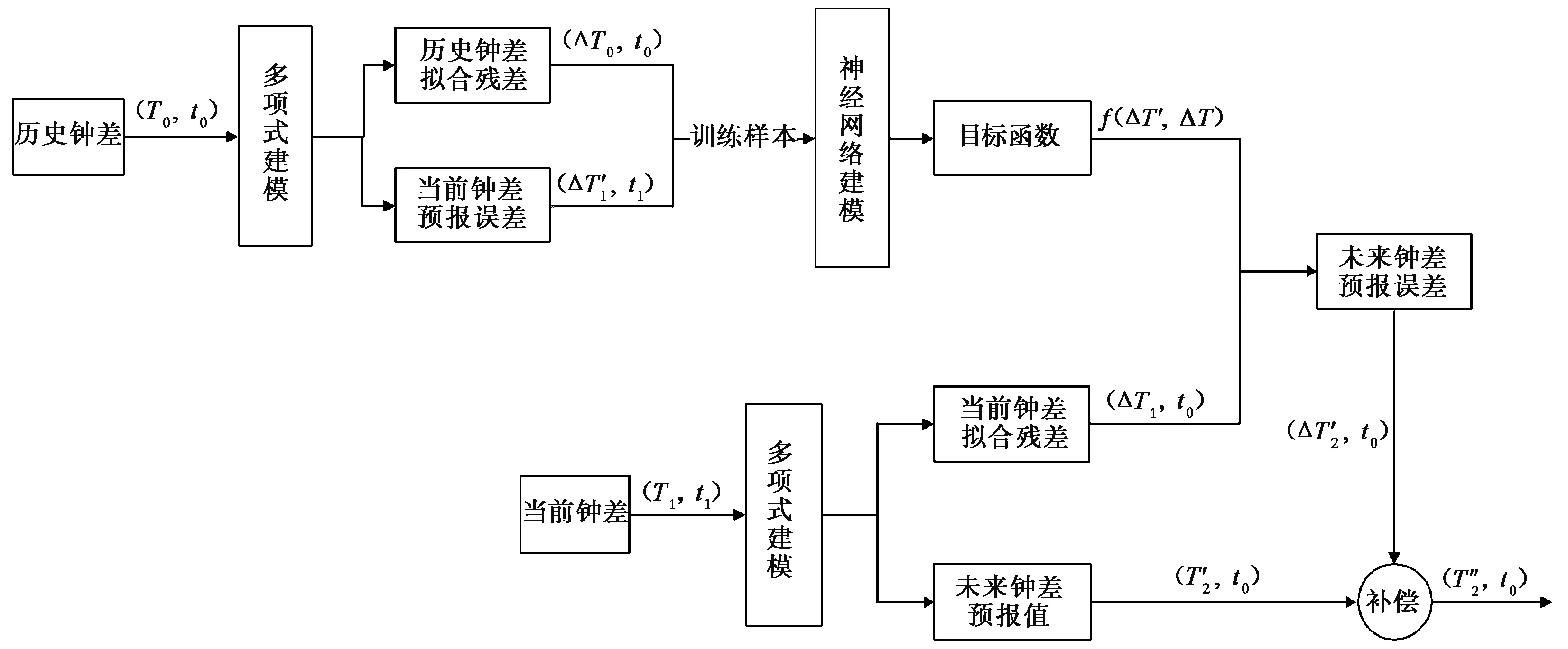
圖2 神經網絡模型訓練及補償示意圖
3 算例分析
采用COMPASS系統GEO-05衛星2015年8月12/13/14/15日連續4天共96小時的實測鐘差數據進行神經網絡控制鐘差預報誤差試驗。先利用傳統二階多項式對GEO-05衛星鐘差進行預報,再利用神經網絡預測鐘差預報誤差,將其補償到傳統模型預報結果中,評估補償后的預報精度提高幅度。采用均方根誤差(RMS)來衡量模型的預報精度, 其公式為
(8)
05衛星預報鐘差。
具體方案如下:鐘差數據資料采樣間隔為1s,時間跨度選為3n小時,將資料分為三段,即第一段n小時、第二段n小時和第三段n小時。采用二階多項式模型對第一段n小時鐘差數據資料建模,預報第二段n小時的鐘差,根據實測鐘差值,可得到第一段n小時鐘差擬合殘差和第二段n小時鐘差預報誤差,對二者進行訓練得到n小時預報誤差與擬合殘差的映射關系;采用二階多項式模型對第二段n小時鐘差數據資料建模,預報第三段n小時的鐘差,根據實測鐘差值,可得到第二段n小時鐘差擬合殘差,利用訓練得到的映射關系可由第二段n小時鐘差擬合殘差預測得到第三段n小時鐘差預報誤差,將其補償到第三段n小時的二階多項式預報鐘差結果中去。以第三段n小時的實測鐘差為真值,評估第三段n小時鐘差的二階多項式模型預報精度及神經網絡補償后的鐘差預報精度,并對補償效果進行分析。本文設定n等于2小時、6小時、12小時、18小時、24小時和30小時共6種情形,計算結果如表1和圖3所示,其中,PM表示二階多項式模型預報結果,NN表示BP神經網絡補償后的預報結果。
由表1和圖3可見: 1) 采用傳統二階多項式模型,2、6、12、18、24和30小時的衛星鐘差預報誤差RMS分別為0.35ns、1.01ns、1.36ns、3.24ns、4.72ns和6.75ns,隨著預報時長的增加,預報誤差不斷增大; 2) 采用神經網絡補償后,2、6、12、18、24和30小時的衛星鐘差預報誤差RMS分別為0.08ns、0.24ns、0.38ns、0.49ns、0.55ns和0.60ns,隨著預報時長的增加,預報誤差的增大趨勢被有效控制在1ns范圍內; 3) 相同預報時長情況下,神經網絡補償后的預報精度明顯提高,2、6、12、18、24和30小時的衛星鐘差預報精度分別提高了0.27ns、0.77ns、1.02ns、2.75ns、4.17ns和6.15ns,補償比例分別為77.14%、76.24%、75.00%、84.88%、88.35%和91.11%,可見,預報時間超過12小時的情況下,預報時間越長,補償效果越明顯。
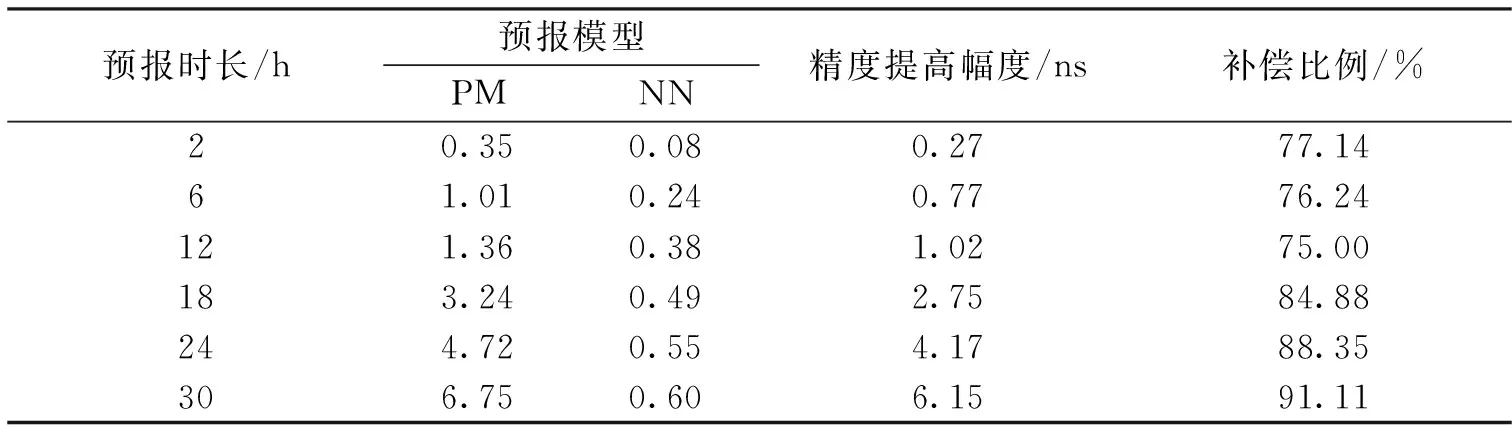
表1 衛星鐘差預報誤差RMS統計結果/ns

圖3 衛星鐘差預報誤差 (a) 2 h; (b) 6 h; (c) 12 h; (d) 18 h; (e) 24 h; (f) 30 h
4 結束語
本文將BP神經網絡應用于導航衛星鐘差預報誤差控制,通過訓練歷史鐘差擬合殘差和當前鐘差預報誤差,得出二者之間的映射關系,根據當前鐘差擬合殘差預測出未來鐘差預報誤差,并將其補償到未來鐘差預報結果中去,有效控制鐘差預報誤差隨時間不斷變大的趨勢。COMPASS導航衛星實測數據驗證結果表明:神經網絡將導航衛星鐘差6種不同時長的預報誤差均控制在1 ns范圍內,30小時的預報精度高達0.6 ns,高于相同預報時長的其他方法預報精度,驗證了本文方法的合理性和有效性。
然而,利用BP神經網絡進行樣本訓練時,對訓練樣本的前提要求是連續且規律性強。本文將鐘差擬合殘差和鐘差預報誤差作為訓練樣本,故要求二者是連續且規律性強。文中選取的試驗樣本是全天候連續觀測的GEO衛星鐘差,對于非全天候連續觀測的導航衛星,可以考慮采用星間鏈路補充地面不可視弧段,確保衛星鐘差數據連續性,再考慮使用BP神經網絡進行鐘差預報。此外,考慮到星載原子鐘長期運行過程中,其物理特性變化有一定的隨機性,因此,基于規律性強的歷史樣本預測方法也存在一定的局限性,下一步將繼續探索其他處理方法的可行性。
[1]吳海濤,李孝輝,盧曉春,等.衛星導航系統時間基礎[M].北京:科學出版社,2011.
[2]劉建成,楊睿峰,徐赟,等.基于Kalman濾波器的衛星鐘差預報精度分析[J].全球定位系統,2012,37(4):1-5.
[3]路曉峰,楊志強,賈小林,等.灰色系統理論的優化方法及其在衛星鐘差預報中的應用[J].武漢大學學報(信息科學版),2008,33(5):492-495.
[4]郭承軍,滕云龍.神經網絡在衛星鐘 差短期預報中的應用研究[J].測繪科學,2011,36(4):198-200.
[5]張景元.基于神經網絡的衛星鐘差預報研究[J].計算機工程與設計,2014,35(9):3254-3257.
[6]王宇譜,呂志平,陳正生,等.衛星鐘差預報的小波神經網絡算法研究[J].測繪學報,2013,42(3):323-330.
[7]郭承軍,滕云龍.基于小波分析和神經網絡的衛星鐘差預報性能分析[J].天文報,2010,51(4):395-403.
Satellite Clock Prediction and Error Control Based on Neural Network
ZHU Lingfeng,LI Chao,LIU Li,LI Xiaojie,GUO Rui
(BeijingSatelliteNavigationCenter,Beijing100094,China)
Aiming at improving the predicting precise of satellite clock error, method of controlling satellite clock error will be mentioned in this paper which is also based on BP neural network theory. Considering of the nonlinearity mapping ability of neural network, this method compares residual errors, which is created according to outdated statistics, with current errors to find the potential relation between these 2 errors. After the comparison, this paper gets mapping relation between residual errors and current errors. This paper assumes this relation also exist between current errors and the future errors. To prove this assumption is workable, this paper analyzes the predicting precise of satellite clock error through the statistics of COMPASS satellite clock error. The analysis shows this method is feasible and effective, which means neural network can improve the predicting precise of satellite clock error.
Neural network; satellite clock error; COMPASS; prediction
2016-01-22
國家高技術研究發展計劃(批準號:2014AA123102).
P228.4
A
1008-9268(2016)03-0068-05
朱陵鳳(1983-),女,碩士,工程師,主要從事衛星導航系統時間同步技術研究。
李超(1981-),男,碩士,工程師,主要從事衛星導航用戶終端測試技術研究。
劉利(1976-),男,博士,高級工程師,主要從事衛星導航系統總體技術研究。
李曉杰(1984-),女,博士,工程師,主要從事衛星導航系統精密定軌技術研究。
郭睿(1982-),男,博士,高級工程師,主要從事衛星導航系統總體技術研究。
doi:10.13442/j.gnss.1008-9268.2016.03.014
聯系人: 朱陵鳳 E-mail: 50903763@qq.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
