基于GPS定位的四旋翼飛行器設計
2016-08-15 10:20:48王鵬馮帥余昌樂許童羽
農業(yè)科技與裝備 2016年5期
王鵬 馮帥 余昌樂 許童羽


摘要:設計基于微控制器STM32F4系列和GPS定位的新型農情監(jiān)測平臺,以微控制器STM32F407為控制核心,用GPS模組、陀螺儀、加速度計等多種傳感器測算位置和姿態(tài)信息。硬件由飛行控制器、數傳模組、動力系統(tǒng)、機架、云臺伺服系統(tǒng)組成。軟件則采用簡潔穩(wěn)定的四元數加互補濾波姿態(tài)解算算法,融入PID控制算法,實現穩(wěn)定飛行、GPS定位等功能。四旋翼飛行器擴展性高、適應性強,能夠適應各種復雜環(huán)境,在農情信息采集中具有較高的應用價值。
關鍵詞:四旋翼飛行器;GPS定位;STM32F4;四元數算法;農情信息采集
中圖分類號:TP242.6 文獻標識碼:A 文章編號:1674-1161(2016)05-0027-03
隨著傳感器技術的突破和GPS在民用控制系統(tǒng)中的廣泛應用,微型飛行器系統(tǒng)得到了長足發(fā)展,四旋翼飛行器成為國內外研究熱點。四旋翼飛行器是微型機電系統(tǒng)的集成產物,特別適合在近地面環(huán)境(如曠野、城區(qū)和林場等)中執(zhí)行測繪等任務,具有廣闊的應用前景。四旋翼飛行器不但具有直升機垂直升降的飛行性能,而且在一定程度上降低了飛行器機械結構的設計難度。四旋翼飛行器的優(yōu)勢為:在制作過程中,對整體機身的中心、對稱性及電機性能要求較低。
1 系統(tǒng)硬件方案
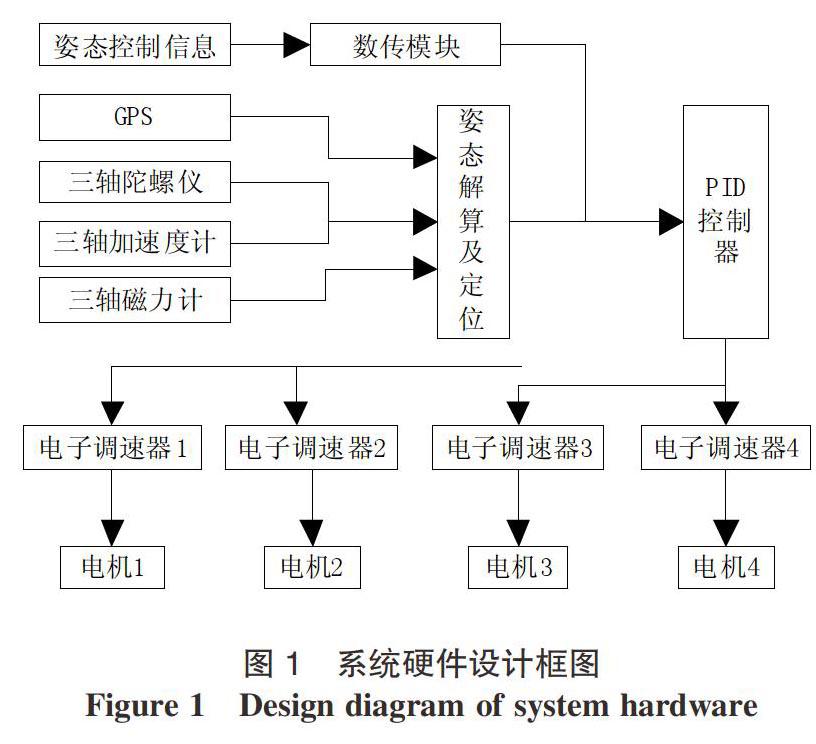
本設計采用STM32F4作為核心控制器,該微控制器(MCU)內核是ARM Cortex-M4架構,具有高性能、低功耗、低成本等特點。飛行控制器包括NEO-6M型GPS定位模組、姿態(tài)傳感器MPU6050型模塊、無線數傳模塊、無刷直流電機調速器、電源管理模組、遙控器(使用商品遙控)及接收機。MCU捕獲接收機的PPM信號后,傳感器與MCU采用IIC總線實現數據通信,MCU使用PWM信號控制電子調速器間接控制電機轉速。軟件算法采用四元數和互補濾波算法解算姿態(tài)信息,控制算法采用經典PID控制器控制四旋翼穩(wěn)定飛行和云臺舵機。系統(tǒng)硬件如圖1所示。
2 傳感器數據處理
2.1 GPS定位數據解析
ATK-NEO-6M模塊是ALIENTEK公司生產的一款高性能GPS模塊,核心采用UBLOX公司的NEO-6M模組,具有50個通道,追蹤靈敏度高達161 dBm,測量輸出頻率最高5 Hz。ATK-NEO-6M模塊自帶高性能無源陶瓷天線,兼容3.3 V和5.0 V單片機系統(tǒng),并自帶可充電后備電池(支持溫啟動或熱啟動)。另外,模塊自帶一個狀態(tài)指示燈——PPS。該指示燈連接在UBLOX NEO-6M模組的TIMEPULSE端口,該端口的輸出特性可以通過程序設置。PPS指示燈可判斷模塊的當前狀態(tài)。在默認條件下有2種狀態(tài):常亮表示模塊已開始工作,但還未實現定位;閃爍(100 ms滅,900 ms亮),表示模塊已經定位成功。
2.2 姿態(tài)解算
MPU6050是InvenSense公司的六軸運動處理組件,如圖2所示。相較于多組件方案,免除了組合陀螺儀與加速度計之間的時間差問題。MPU6050內部整合三軸陀螺儀、三軸加速度傳感器及一個IIC接口,可用于連接外部地磁傳感器,利用自帶的數字運動處理器(Digital Motion Processor,DMP)硬件加速引擎,通過主IIC接口向應用端輸出完整的9軸融合演算數據。
四旋翼飛行器系統(tǒng)是一個時變且非線性系統(tǒng),采用傳統(tǒng)PID算法的單一反饋控制,存在不同程度的超調和振蕩現象,無法得到理想的控制效果。將前饋控制引入飛行器系統(tǒng)控制中,能有效改善系統(tǒng)實時性,提高反應速度。根據四旋翼飛行器系統(tǒng)的特點,引入微分先行環(huán)節(jié),改善系統(tǒng)動態(tài)特性,控制器能更好地適應四旋翼飛行器系統(tǒng)的實際情況。
軟件設計由STM32F4讀取傳感器信息、解算姿態(tài)角,以姿態(tài)角為被控制量融合遙控參量后,輸出PWM控制信號到動力系統(tǒng)及2個舵機,實現四旋翼飛行控制和云臺穩(wěn)定補償。程序流程如圖3所示。
3 控制設計
四旋翼飛行器結構對稱,俯仰角與橫滾角的控制特性基本相同,且相對獨立。四旋翼飛行器的俯仰、橫滾、偏航、升降可通過4個輸入量來控制。通過設定期望角度調整電機轉速,使姿態(tài)角穩(wěn)定在期望角。控制策略設計為閉環(huán)控制,以姿態(tài)角做為被控制量,并應用經典PID控制算法。
在姿態(tài)角控制中,將控制器捕獲到的遙控器控制信號轉換為期望角,與解算的測量角作差設為error。將error乘以一個比例系數kp。只有kp作用時系統(tǒng)存在靜差,利用積分ki控制消除穩(wěn)態(tài)誤差。積分控制可降低系統(tǒng)的動態(tài)性能,甚至造成閉環(huán)系統(tǒng)不穩(wěn)定,因此要對積分進行限幅,防止積分過大。
若采用傳統(tǒng)的微分方法微分,在人為操縱飛行器時會造成輸入設定值變化頻繁且幅度較大,易導致系統(tǒng)振蕩。為解決以上問題,在姿態(tài)角控制過程引入微分先行PID算法,只對輸出量即陀螺儀角速度測量值進行微分,而不對姿態(tài)角的設定值作微分。這樣,在設定值發(fā)生變化時,輸出量不會改變,被控量的變化也比較緩和,可明顯改善系統(tǒng)動態(tài)性能。
將俯仰、橫滾、航向控制量分別輸入3個獨立的PID控制器(如圖4所示),得到3個PID輸出:pid_roll,pid_pitch,pid_yaw。將這3個輸出量作簡單的線性運算并輸出給電機。部分代碼如下:
4 系統(tǒng)調試
4.1 姿態(tài)角調試
在完成控制器底層的硬件驅動后,進行姿態(tài)角算法調試。利用數傳模塊將解算出的姿態(tài)角數據發(fā)回上位機,搖動四軸機體,觀察上位機數據曲線與姿態(tài)。
4.2 控制電機調試
針對四旋翼飛行器的PID算法,需要反復試驗整定出最優(yōu)參數。先整定單軸平衡參數,再整定另一軸,最后整體調節(jié)參數達到期望的平衡狀態(tài)。為方便調試參數,設計如圖5所示試驗平臺。
5 結論
本研究設計一種應用GPS定位的四旋翼飛行器,對其系統(tǒng)設計方案中相關硬件進行說明。給出飛行器姿態(tài)解算過程,介紹PID控制算法在姿態(tài)解算及其控制中的應用。采用高精度GPS模組改進GPS數據解析算法,實現更快速、精確定位。姿態(tài)算法采用基于四元數的互補濾波,姿態(tài)角無奇點,比起卡爾曼濾波等濾波算法,本研究的濾波算法有著計算量小的特點,節(jié)約CPU計算時間,對微處理器的性能要求低。該設計是基于GPS定位的新型農情監(jiān)測平臺,具有諸多優(yōu)點,可垂直起降及機動性強,能夠適應各類復雜環(huán)境,在農情信息采集中具有較高的應用價值。
參考文獻
[1] 楊力,張帆,張峰.四旋翼飛行器動力控制系統(tǒng)研究與設計[J].科學技術與工程,2012(24):6087-6090.
[2] 李繼宇,張鐵民,彭孝東,等.四旋翼飛行器農田位置信息采集平臺設計與實驗[J].農業(yè)機械學報,2013(5):202-206.
[3] 王利民.基于無人機影像的農情遙感監(jiān)測應用[J].農業(yè)工程學報,2013(9):136-145.
[4] 李俊,李運堂.四旋翼飛行器的動力學建模及PID控制[J].遼寧工程技術大學學報,2012(2):114-117.
[5] 王帥,魏國.在四旋翼無人飛行器姿態(tài)測量中的應用[J] .兵工自動化,2011(1):73-74.
Abstract: A new type agricultural condition inspection platform was designed based on micro controller STM32F4 seriesand GPS positioning. With the micro controller STM32F407 as the control core, GPS module, gyroscope, accelerometer and other sensors were used to measure the position and attitude information. The hardware consisted of flight controller, data transmission module, power system, frame, holder servo system. Software made the use of simple and stable quaternion plus complementary filtering algorithm, integrated into the PID control algorithmto achieve stable flight and GPS positioning and other functions. The quadrotor hadmany advantages, such as the expansion of high, strong adaptability and adapt to all kinds of complex environment, with the high application valuein the agricultural information collection.
Key words: quadrotor; GPS positoning; STM32F4; quaternion algorithm; agricultural information collection