光電跟蹤系統前饋速度求解方法
2016-08-12 03:37:38劉啟輝董琦昕
兵器裝備工程學報 2016年6期
文 云,劉啟輝,董琦昕
(中國兵器工業第五八研究所,四川 綿陽 621000)
?
光電跟蹤系統前饋速度求解方法
文云,劉啟輝,董琦昕
(中國兵器工業第五八研究所,四川 綿陽621000)
摘要:針對脫靶量滯后引起系統誤差導致光電跟蹤系統不能準確測距的問題,提出了加入前饋速度提高跟蹤系統無差度的復合控制策略;以等效正弦和目標模擬航路為仿真模型,通過基于最小二乘的多項擬合算法對目標航跡實時預測以及跟蹤微分器或差分低通濾波器求解目標前饋速度,對前饋速度求解算法進行了軟件仿真,仿真結果表明:航跡誤差與前饋速度誤差均滿足實際系統要求;將此算法應用于某型光電跟蹤系統,在外場試驗中對特定目標的穩定最大跟蹤誤差在0.4 m以內。
關鍵詞:脫靶量滯后;復合控制;前饋速度;模擬航路;多項擬合;跟蹤微分器
本文引用格式:文云,劉啟輝,董琦昕.光電跟蹤系統前饋速度求解方法[J].兵器裝備工程學報,2016(6):29-34.
Citationformat:WENYun,LIUQi-hui,DONGQi-xin.SolvingMethodofFeedForwardVelocityinPhotoelectricTrackingSystem[J].JournalofOrdnanceEquipmentEngineering,2016(6):29-34.
在光電跟蹤系統中,圖像處理分系統提取紅外圖像中目標偏離視場中心的偏差量(脫靶量)作為伺服跟蹤分系統的控制輸入[1],實現對目標的閉環跟蹤。由于紅外探頭圖像生成、圖像傳輸、圖像處理板目標提取和脫靶量輸出過程均不可避免的消耗時間,導致伺服跟蹤分系統的目標反饋輸入滯后于實際目標位置,表現為目標在視場內產生脫靶量系統誤差。脫靶量滯后時間越長,目標的機動性越強,系統誤差越大[2]。當脫靶量較大時,光電跟蹤系統的激光測距設備將無法照射目標產生回波輸出目標距離信息,不能將目標從轉臺極坐標系轉換到炮塔直角坐標系下實現“光電帶炮”目標打擊。李亞寧等[3-4]基于多項式擬合算法對空中目標進行了預測,取得較好的效果,但未將該算法應用于實際跟蹤系統中。本文以光電跟蹤控制系統為研究對象,將目標預測和系統跟蹤相結合進行了研究。
1 復合控制
為提高系統的無差度,伺服跟蹤系統采用復合控制策略[5],其原理圖如圖1。Gv(s)為速度閉環傳遞函數,Cp(s)為位置環校正器,Gf(s)為前饋傳遞函數。
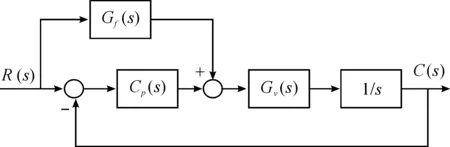
圖1 復合控制原理圖
無前饋時,跟蹤系統的開環傳遞函數為
(1)
加入前饋后,系統的閉環傳遞函數為
(2)
其等效開環傳遞函數為
(3)
(4)
此時系統為I型系統,僅能實現位置無差。加入前饋速度后Gf(s)=s,代入式(2)和(3)得到系統的等效開環傳遞函數為
(5)
系統變為II型系統,位置和速度誤差均為零,由此可見,加入前饋速度能在保證系統穩定性前提下提高系統的無差度,消除速度誤差提高伺服系統跟蹤精度。前饋函數同時加入加速度時,可將系統變為III型系統,實現加速度誤差,但由于測量和過程噪聲的影響使加速度精度較低,不能保持系統穩定,因此工程中通常加入前饋速度作為復合控制輸入。
2 目標仿真模型
機動目標模型要求能充分反映運動目標的機動特征,常見的數學模型有導數多項式模型、辛格模型和當前統計模型等,導數多項式模型根據多項式在有限區間可以任意精度逼近一個連續函數,模擬目標航跡;辛格模型以二階導數多項式模型進行改進,假定目標機動加速度概率密度函數呈均勻分布,且機動加速度均值為零;當前統計模型以辛格模型進行改進,認為目標以某加速度運動時,下一時刻加速度在當前加速度值的某一領域內[6]。本文根據某型光電跟蹤系統的主要跟蹤目標為研究對象分別建立了等效正弦模型和模擬航路模型。
2.1等效正弦模型
根據運動目標的機動特性,采用速度為20°/s,加速度為20°/s2的等效正弦曲線,工程中采用密位(m)單位,得到位置正弦曲線為Y=333.4sint,如圖2所示。
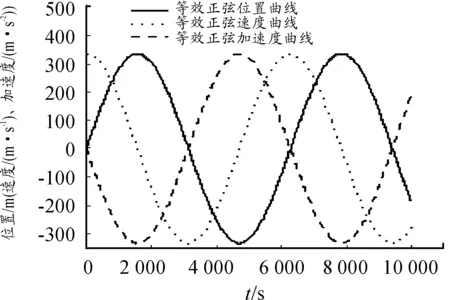
圖2 等效正弦模型
2.2模擬航路模型
如圖3所示為目標模擬航路示意圖,目標由8km外的空域勻速飛行,飛行高度h=300m,飛行速度v=230m/s,航路捷徑為x=250m,根據航跡解算,得到目標在轉臺極坐標系下的位置和速度公式:
(6)
圖3 目標模擬航路
得到轉臺坐標系下方位和俯仰軸的目標位置和速度曲線分別如圖4所示。
3 航跡預測與速度求解
實時預測算法主要有最小二乘遞推法、維納濾波法和卡爾曼濾波算法等[7-8],最小二乘法是經典的參數估計方法,在許多算法中起主導作用[9],考慮到算法計算量和實時性要求,本文采用限定記憶型最小二乘遞推算法,在選擇預測模型時,采用多項式擬合模型逼近航跡序列,并對算法和實際運算進行優化和簡化,以提高預測的精度。
圖4 模擬航路航跡
3.1航跡預測
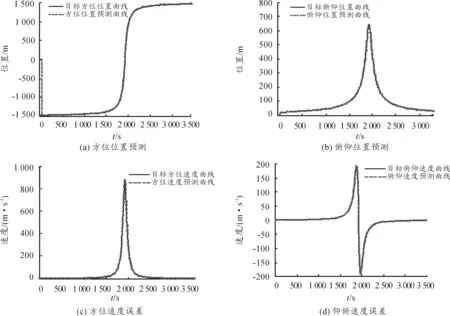
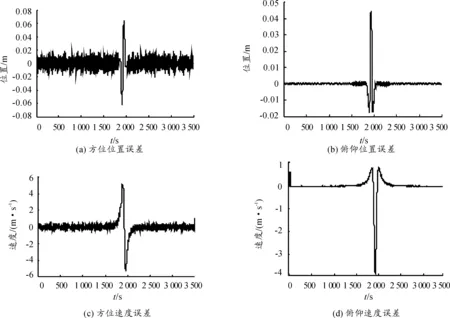
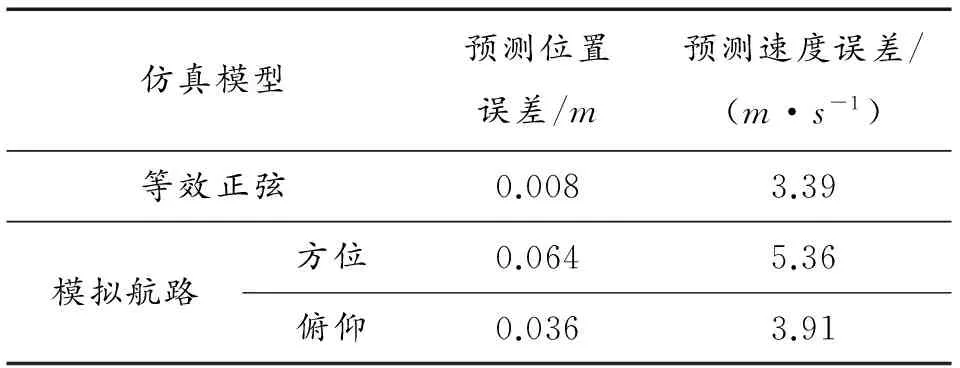
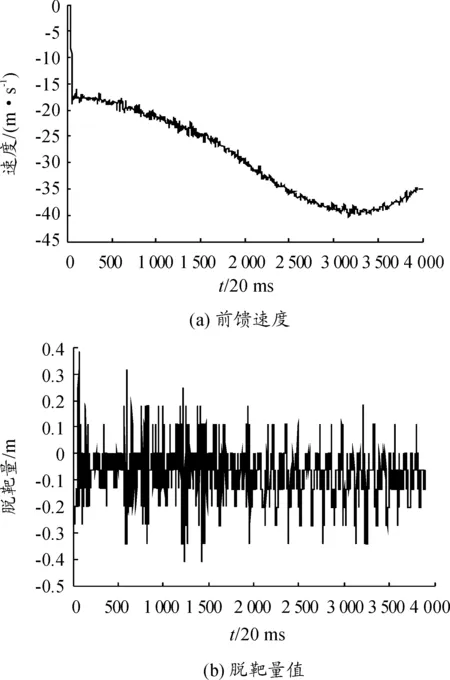
設有n個序列點(xi,yi)(i=1,2,…,n),存在一個m(m (7) 設Ri(i=1,2,…,n)為多項式P(x)與yi(i=1,2,…,n)的差值,有: (8) 即是 (9) 曲線P(x)并非通過所有序列點(xi,yi),故Ri(i=1,2,…,n)不全為零。最小二乘法就是選擇aj(j=1,2,…,m),使σ有最小值,其中: (10) 式(10)的解可以用矩陣XA=Y的解來表示,其中: A=W-1XTY (11) 3.2前饋速度求解 多項式預測算法得到目標航跡后,目標的前饋速度可以通過跟蹤微分器或對位置數據進行差分求解出目標前饋速度。采用跟蹤微分器時,設Gc(s)為位置環校正器,Gv(s)為速度閉環傳遞函數,得到跟蹤微分系統輸入輸出系統框圖如圖5,求得系統的閉環傳遞函數為 (12) 圖5 跟蹤微分器系統框圖 采用位置數據差分求解前饋速度時,差分放大過程含有較大的過程噪聲,通過采用低通濾波器對速度數據進行濾波[11],選擇低通帶寬較高時,不能有效濾除速度噪聲,選擇低通帶寬較低時,會帶來嚴重滯后,加大速度誤差,脫靶量輸出的幀頻為50Hz,這里選擇帶寬為10rad/s求取低通后的前饋速度。數據處理低通濾波器采用“tustin”法離散化,得到離散方程為 (13) 光電跟蹤系統的紅外探頭工作頻率為50Hz,加上圖像傳輸、圖像處理和脫靶量輸出消耗的時間,這里假定脫靶量滯后時間為40ms。 4.1等效正弦仿真 以速度為20°/s,加速度為20°/s2的等效正弦曲線為仿真模型,采用多項擬合預測算法得到位置和速度預測曲線如圖6所示,預測航路在300ms后建航成功,開始輸出預測曲線。 將目標位置和速度曲線與預測位置和預測速度曲線作差,得到等效正弦仿真模型的位置和速度誤差曲線如圖7所示。 從位置和速度誤差曲線知,等效正弦仿真模型下預測位置與目標實際位置最大誤差為8.38×10-3m,預測速度與目標實際速度最大誤差為3.39m/s。 圖6 等效正弦位置和速度預測 4.2模擬航路仿真 以2.2節模擬航路作仿真模型,分別得到方位和俯仰軸的位置和速度預測曲線如圖8所示。 將目標位置和速度曲線與預測位置和預測速度曲線作差,分別得到模擬航路仿真模型的位置和速度誤差曲線如圖9所示。 圖8 模擬航路位置和速度預測 圖9 模擬航路位置和速度預測誤差 從位置和速度誤差曲線知,模擬航路模型下方位軸預測位置與目標實際位置最大位置誤差為0.064,預測速度與目標實際速度的最大速度誤差為5.36m/s;俯仰軸預測位置與目標實際位置最大位置誤差為0.036m,預測速度與目標實際速度的最大速度誤差為3.91m/s。 采用等效正弦和模擬航路進行仿真,得到仿真結果如表1所示。而紅外探頭視場大小為50m×37.5m,由此可見通過多項擬合法預測目標航跡輸出前饋速度的算法精度可靠,可以用于實際工程中。 表1 仿真結果 4.2算法實現 將本文的目標航跡預測和前饋速度求解算法應用于某型光電跟蹤系統,外場試驗以某機動目標為對象,進行實時跟蹤。記錄前饋速度曲線和脫靶量數據曲線如圖10所示,表明當目標運動速度不大于40m/s時,最大跟蹤誤差能保持在0.4m以內,跟蹤誤差均方差為0.095m。 圖10 跟蹤試驗數據 求解過程中,采用多項擬合目標航跡預測加跟蹤微分器(或差分低通)的方法得到前饋速度,并以等效正弦和模擬航路為模型進行了Matlab軟件仿真,結果表明預測精度可靠。將該算法應用于實際系統中,通過外場試驗檢驗,取得了良好的跟蹤效果。 參考文獻: [1]徐慶飛,張新,李衛民.二維空間中目標軌跡預測算法研究與分析[J].航空電子技術,2012,43(1):10-14. [2]安凱,馬佳光,傅承毓.運動目標位置預測模型[J].系統工程與電子技術,2001(12):4-7. [3]李亞寧.基于多項式擬合法的空中目標實時位置預測研究[J].計算機與數字工程,2015,43(3):404-407. [4]徐智勇,傅承毓,王滿意,等.用擬合函數法準確預測運動目標的軌跡[J].光電工程,2000,27(1):17-19. [5]陳明俊,李長紅,楊燕.武器伺服系統工程實踐[M].北京:國防工業出版社,2013:62-65. [6]李文軍.復合軸光電跟蹤系統控制策略的研究[D].長春:中國科學院長春精密機械與物理研究所,2006. [7]徐慶飛,張新,李衛民.二維空間中目標軌跡與測算法研究與分析[J].航空電子技術,2012(1):33-37. [8]楊晨,袁博,楊軍,等.目標飛行航跡預測算法研究[J].彈箭與制導學報,2005,25(3):215-217. [9]張尚劍,劉永智.用滑動窗多項式擬合法實時預測運動目標軌跡[J].光電工程,2003,30(4):24-27. [10]邵偉,孟秋池,龔丹丹.多傳感器數據融合與航跡預測[J].數學的實踐與認識,2010,40(15):151-159. [11]黃知濤,鄭龍席.高性能數據采集系統中信號的低通濾波原理及實踐[J].測控技術,1999,18(5):55-56. [12]李璀,張釗,周勇.當前統計模型下的目標狀態魯棒H∞預估算法[J].兵工自動化,2014(9):83-85. (責任編輯周江川) doi:10.11809/scbgxb2016.06.007 收稿日期:2015-12-01;修回日期:2016-01-06 作者簡介:文云(1987—),男,碩士,工程師,主要從事伺服穩定跟蹤控制研究。 中圖分類號:TN510 文獻標識碼:A 文章編號:2096-2304(2016)06-0029-06 SolvingMethodofFeedForwardVelocityinPhotoelectricTrackingSystem WENYun,LIUQi-hui,DONGQi-xin (No.58ResearchInstituteofChinaOrdnanceIndustries,Mianyang621000,China) Abstract:Aiming at the problem that photoelectric tracking system can’t measure distance accurately because of the system error caused by miss distance delay, the strategy of combined control based on feed forward velocity to raise the indiscrimination degree was proposed. This paper took equivalent sine and simulated route as models, and put forward polynomial fitting that based on least square to predict target trajectory in real time and solved feed forward velocity by tracking differentiator or differential and low-pass filter. Then a software simulation has done, and the results show that the trajectory and feed forward velocity error satisfies requirement in actual system. Takes the algorithm in a photoelectric tracking system, the maximum tracking error of field test is within 0.4 mils. Key words:miss distance delay; combined control; feed forward velocity; simulated route; polynomial fitting; tracking differentiator


4 仿真與應用

5 結束語