基于繼電器反饋的自整定PID調(diào)節(jié)器設(shè)計
2016-07-18 09:29:58白迎斌
甘肅科技 2016年7期
白迎斌
(蘭州交通大學(xué)機電工程學(xué)院,甘肅 蘭州 730070)
?
基于繼電器反饋的自整定PID調(diào)節(jié)器設(shè)計
白迎斌
(蘭州交通大學(xué)機電工程學(xué)院,甘肅 蘭州 730070)
摘要:PID控制是目前過程工業(yè)應(yīng)用最普遍的控制方法之一。但是簡單PID控制不能很好地適應(yīng)對象系統(tǒng)特性變化時的最佳控制要求,而人工調(diào)整參數(shù)在控制精度和調(diào)整頻度上均不可能滿足時時變化的對象系統(tǒng)的控制要求。目前己有的多種具有PID參數(shù)自整定功能的智能調(diào)節(jié)器大多整定復(fù)雜并對實際控制過程有影響。鑒于PID控制方法目前仍有廣泛應(yīng)用,PID參數(shù)自整定調(diào)節(jié)器的設(shè)計將具有很好的應(yīng)用價值和市場空間。針對應(yīng)用現(xiàn)狀,提出并實現(xiàn)了一種基于繼電器反饋,具有自整定功能的PID調(diào)節(jié)器的設(shè)計。
關(guān)鍵詞:PID控制;繼電器反饋;自整定;調(diào)節(jié)器
PID控制是目前過程工業(yè)應(yīng)用最普遍的控制方法之一。但是簡單PID控制不能很好地適應(yīng)對象系統(tǒng)特性變化時的最佳控制要求,而人工調(diào)整參數(shù)在控制精度和調(diào)整頻度上均不可能滿足時時變化的對象或系統(tǒng)的控制要求。目前己有的多種具有PID參數(shù)自整定功能的智能調(diào)節(jié)器大多整定復(fù)雜并對實際控制過程有影響。鑒于PID控制方法目前仍有廣泛應(yīng)用,PID參數(shù)自整定設(shè)計將具有很好的應(yīng)用價值。同時,工業(yè)裝置在運行過程中,過程對象的動態(tài)特性會發(fā)生或大或小的變化,實現(xiàn)PID參數(shù)的自整定,可以在過程特性發(fā)生變化以后使控制器參數(shù)隨之作相應(yīng)的變化,即可使PID控制器具有一定的自適應(yīng)控制能力。
繼電器反饋自整定PID調(diào)節(jié)器可以應(yīng)用在簡單過程控制系統(tǒng)、復(fù)雜過程控制系統(tǒng),能完成自動整定PID初始參數(shù)、自動在線優(yōu)化PID參數(shù),保證系統(tǒng)在優(yōu)化的情況下工作。調(diào)節(jié)器具有節(jié)省人工、優(yōu)化運行、配置簡單等特點,使控制系統(tǒng)的投運、調(diào)試、運行簡便、高效。
1 繼電器反饋自整定PID算法
繼電自整定PID參數(shù)的基本思路是在控制系統(tǒng)中設(shè)置兩種模式:自整定模式和調(diào)節(jié)模式。在自整定模式下,由繼電器閉環(huán)的極限環(huán)法來整定系統(tǒng)的臨界比例增益和振蕩頻率,而在調(diào)節(jié)模式下,由PID參數(shù)整定方法整定出PID參數(shù)值,然后對控制對象進行控制調(diào)節(jié),如果控制系統(tǒng)發(fā)生變化,則需要重新進行自整定。繼電型PID自整定控制的結(jié)構(gòu)如圖1所示。圖1中,GaCjωc為廣義被控對象,當開關(guān)S位于自整定位置時,系統(tǒng)處于整定狀態(tài),當開關(guān)S置于調(diào)節(jié)位置時,系統(tǒng)進行PID控制輸出。
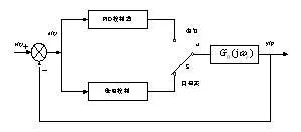
圖1 繼電反饋自整定結(jié)構(gòu)圖
用描述函數(shù)方法來確定系統(tǒng)的增益Kc和振蕩頻率ωc,圖2為系統(tǒng)的繼電非線性環(huán)節(jié)特性。
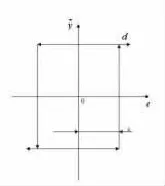
圖2 繼電非線性環(huán)節(jié)特性圖
由描述函數(shù)理論可知,圖2中給出的帶有回環(huán)的繼電非線性環(huán)節(jié)特性的描述函數(shù)可以表達為

式中:A代表正弦波幅值;d表示回環(huán)幅值;ε代表回環(huán)寬度的一半。
只考慮一種簡單的情況,假設(shè)繼電非線性環(huán)節(jié)不帶有回環(huán),即若ε=0,則描述函數(shù)可以簡化為

當繼電反饋用描述函數(shù)分析時,繼電器用一個近似的線性等價描述函數(shù)假定,則可以給出對象的頻率響應(yīng)為:

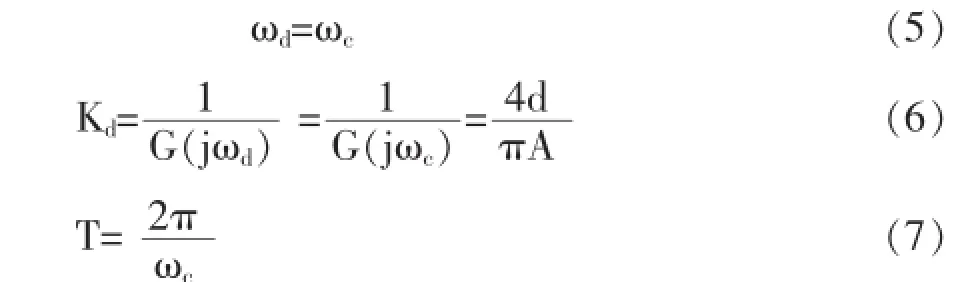
描述函數(shù)分析中假設(shè)G(jωc)的奈氏曲線與實軸在-1/N(A)的ωc處相交,而對像的奈氏曲線與負實軸的交點稱為臨界點,定義對象的臨界點頻率ωd為如下:

因此可以估計臨界點頻率ωd和臨界增益Kd:
當已知系統(tǒng)的臨界比例增益和振蕩周期時,可以用經(jīng)驗整定公式來確定PID參數(shù)值,表1給出了根據(jù)Ziegler-Nichols整定公式。
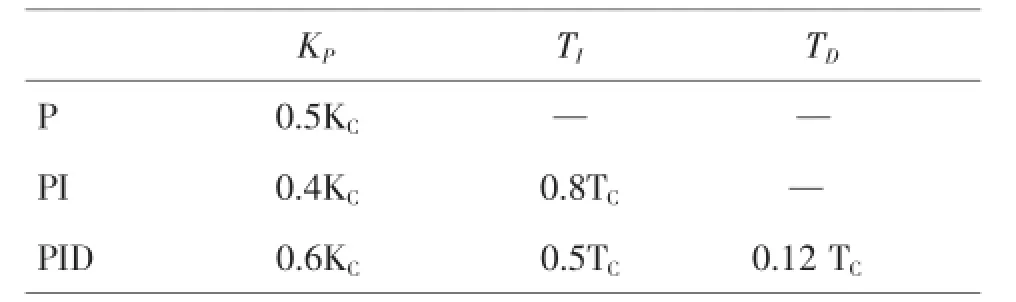
表1 Ziegler-Nichols整定公式
繼電自整定方法簡單,可靠,需要預(yù)先設(shè)定的參數(shù)就是繼電器特性的參數(shù)[1]。
2 系統(tǒng)的硬件設(shè)計
本設(shè)計的硬件框圖如圖3所示。

圖3 調(diào)節(jié)器硬件電路框圖
通常單片機所要控制的繼電器大多為DC5V的小型電子繼電器。盡管如此,光靠單片機的輸出端口的電流恐怕不夠,況且要驅(qū)動繼電器線圈這種電感性負載還需要有些保護,圖4所示為低電平動作的繼電器驅(qū)動電路,當單片機輸出低電平時,單片機輸出的FET導(dǎo)通,可吸入高達數(shù)毫安的電流(即ib),如此大的ib將使晶體管飽和、繼電器激磁,其中電阻R12提供限流保護。當單片機輸出高電平時,單片機輸出端的FET不導(dǎo)通,所以ib=0,晶體管截止,繼電器不激磁。另外,由于線圈屬于電感性負載,當晶體管截止時,ic=0,而原本線圈上的電流iL不可能瞬間為0,所以二極管D10就提供一個iL的放電路徑,使線圈不會產(chǎn)生高的反向電動勢,可防止破壞晶體管[2-3]。
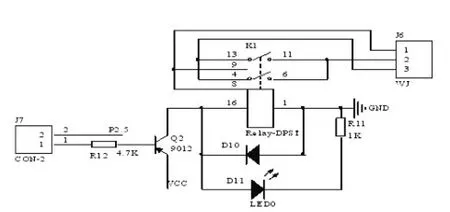
圖4 繼電器驅(qū)動電路
3 系統(tǒng)的軟件設(shè)計
3.1系統(tǒng)主程序
整個程序設(shè)計采用C語言完成。當控制器上電復(fù)位或因為程序跑飛導(dǎo)致看門狗復(fù)位發(fā)生時,程序首先進入初始化函數(shù),對定時器、串行通訊、中斷等部分的參數(shù)進行設(shè)置,之后程序便進入主循環(huán)。調(diào)節(jié)器控制系統(tǒng)軟件按照功能包括:按鍵處理模塊、A/ D轉(zhuǎn)換及其處理器模塊、繼電反饋模塊、存儲器模塊、PID控制模塊、主模塊[4-5]。圖5為本系統(tǒng)軟件的總體流程圖。
3.2PID控制算法
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計的核心內(nèi)容。它是根據(jù)被控過程的特性確定PID控制器的比例系數(shù)、積分時間和微分時間的大小。由PID控制的數(shù)字實現(xiàn)可知增量式PID控制的公式為

式中:

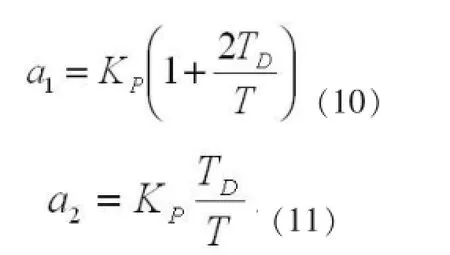

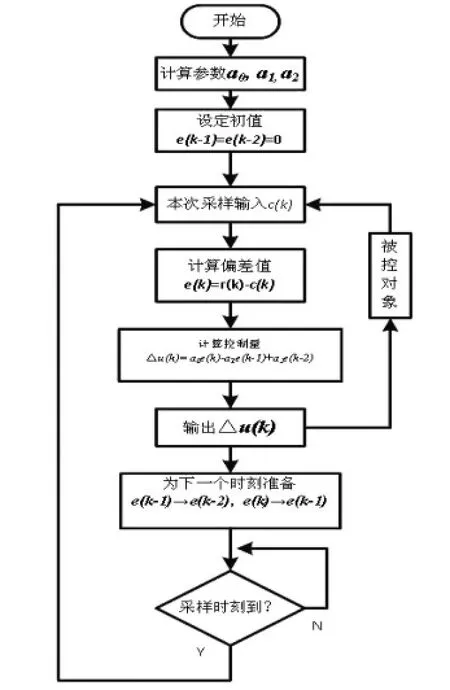
圖5 主程序流程圖
本設(shè)計采用的是增量式PID控制。由計算機控制系統(tǒng)中的經(jīng)典PID控制理論可得流程圖,圖6中r(k)為系統(tǒng)設(shè)定值,c(k)為實際測量值。在增量形式的控制算式中,控制作用中的比例、積分、微分部分是相互獨立的[6-7]。
3.3繼電器反饋自整定程序設(shè)計
圖7為參數(shù)自整定流程圖。
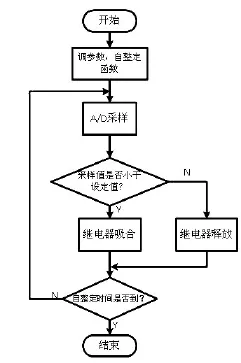
圖7 參數(shù)自整定流程圖
參數(shù)自整定函數(shù)所要完成的功能是,當被調(diào)用時,系統(tǒng)對被控對象進行繼電控制,當傳感器采樣值小于設(shè)定值時繼電器吸合,被控電路回路導(dǎo)通工作,當傳感器采樣值大于設(shè)定值時繼電器釋放,被控電路回路斷開停止工作。當被控對象有一定的滯后時間,產(chǎn)生等幅振蕩,由振蕩周期和臨界增益便可計算出PID參數(shù)[8]。
4 結(jié)論
本設(shè)計介紹了基于繼電器反饋的自整定PID控制器的設(shè)計。其中軟件調(diào)節(jié)采用的是繼電自整定PID算法調(diào)節(jié),它能方便地實現(xiàn)穩(wěn)定的過程控制。并且通過通訊電路模塊,方便控制器與計算機的通訊和程序下載。本設(shè)計只是初步實現(xiàn)了PID參數(shù)自整定基本功能,要真正實現(xiàn)調(diào)節(jié)器自整定優(yōu)化功能還有待進一步研究。
參考文獻:
[1]何宏源,徐進學(xué),金妮.PID繼電器整定技術(shù)發(fā)展綜述[J].沈陽工業(yè)大學(xué)學(xué)報,2006,27(4):57-64.
[2]劉太生,PID控制器參數(shù)自整定方法比較[J].國外建材科技,2005,26(1):10-16.
[3]鄭飛,姜學(xué)東.嵌入式PID控制器及顯示系統(tǒng)的設(shè)計[J].微計算機信息,2009,10(2):63-64.
[4]李華.MCS-51系列單片機實用接口技術(shù)[M].北京:北京航天大學(xué)出版社,2007:156-178.
[5]張義和,王敏男.例說51單片機(C語言版)[M].北京:人民郵電出版社,2010:20-23.
[6]鄭飛,姜學(xué)東.嵌入式PID控制器及顯示系統(tǒng)的設(shè)計[J].微計算機信息,2009,10(2):63-64.
[7]劉太生,PID控制器參數(shù)自整定方法比較[J].國外建材科技,2005,26(1):10-16.
[8]梅曉榕.自動控制原理[M].科學(xué)出版社,2007:176-195.
中圖分類號:TP23
